También podría gustarte
- Clase de TelasDocumento5 páginasClase de TelasKevin Gómez IzaraAún no hay calificaciones
- Anatomia y Fisiologia Del Aparato LocomotorDocumento5 páginasAnatomia y Fisiologia Del Aparato Locomotoralex1414bkbAún no hay calificaciones
- Cuestionario SSCI de confianza deportiva estadoDocumento2 páginasCuestionario SSCI de confianza deportiva estadoFernando Jose Bravo Correa100% (1)
- Movimiento del complejo articular del hombroDocumento43 páginasMovimiento del complejo articular del hombroruth sanchezAún no hay calificaciones
- Fundamentos musculoesqueleticosDocumento65 páginasFundamentos musculoesqueleticoscarga19850% (1)
- JorgeMendietaMuñoz Tarea 1Documento16 páginasJorgeMendietaMuñoz Tarea 1yuli yimena rueda tellezAún no hay calificaciones
- ACVDocumento31 páginasACVFofi SartiniAún no hay calificaciones
- Revisión Mobilización NeuralDocumento26 páginasRevisión Mobilización NeuralLuisa CabarcasAún no hay calificaciones
- Sexualidad y Paralisis CerebralDocumento20 páginasSexualidad y Paralisis CerebralAnacornio100% (1)
- Hacia una pedagogía del contacto en fisioterapiaDe EverandHacia una pedagogía del contacto en fisioterapiaAún no hay calificaciones
- Introduccion Al Ejercicio TerapeuticoDocumento66 páginasIntroduccion Al Ejercicio Terapeuticoelda100% (2)
- Revision Bibliográfica VIHDocumento3 páginasRevision Bibliográfica VIHLOURDESAún no hay calificaciones
- Protocolo de Caminata de 6 MinutosDocumento6 páginasProtocolo de Caminata de 6 MinutosCarol SuárezAún no hay calificaciones
- Responsabilidad GerencialDocumento13 páginasResponsabilidad GerencialliliAún no hay calificaciones
- Rol kinesiólogo equipos saludDocumento6 páginasRol kinesiólogo equipos saludPablo Ezequiel Orellana100% (1)
- Fibromialgia, Fisiopatología y Apoyo TerapéuticoDocumento12 páginasFibromialgia, Fisiopatología y Apoyo TerapéuticoCarlos Alfredo López GangasAún no hay calificaciones
- Teorías Del Aprendizaje Motor CdmaDocumento3 páginasTeorías Del Aprendizaje Motor CdmaCyntia MontalvoAún no hay calificaciones
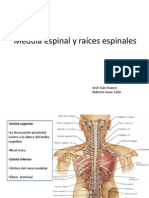
- Medula Espinal y Raíces EspinalesDocumento17 páginasMedula Espinal y Raíces EspinalesusunomAún no hay calificaciones
- Ligamento Cruzado Anterior: Prevención y Rehabilitación en AtletasDocumento12 páginasLigamento Cruzado Anterior: Prevención y Rehabilitación en AtletasJuliana Andrea Castrillon RodriguezAún no hay calificaciones
- Recuperación LCA revisiónDocumento10 páginasRecuperación LCA revisiónFranco CastroAún no hay calificaciones
- Fiabilidad de Los Instrumentos de Medición en Ciencias de La SaludDocumento10 páginasFiabilidad de Los Instrumentos de Medición en Ciencias de La SaludElizabeth CollinsAún no hay calificaciones
- Protocolo respiratorio ELADocumento15 páginasProtocolo respiratorio ELAEFE VEAún no hay calificaciones
- Categorias de Medicion (26) Apta ActualizadaDocumento2 páginasCategorias de Medicion (26) Apta ActualizadaCantillo PauAún no hay calificaciones
- Machado 4 Anatomia MedulaDocumento4 páginasMachado 4 Anatomia MedulaDeisy Lopez HernandezAún no hay calificaciones
- 1 - BiomecanicaDocumento3 páginas1 - Biomecanicaapi-3793691100% (1)
- Introducción y Filosofía Diagnóstico Fisioterápico 2020 02Documento11 páginasIntroducción y Filosofía Diagnóstico Fisioterápico 2020 02Andres OñaAún no hay calificaciones
- Fisioterapia en Lesion MedularDocumento10 páginasFisioterapia en Lesion MedularJoha BerntAún no hay calificaciones
- KaltenbornDocumento9 páginasKaltenbornLara YannickAún no hay calificaciones
- Introduccion A La Kinesiologia 1-2Documento57 páginasIntroduccion A La Kinesiologia 1-2Masoterapia Aplicada0% (1)
- Procesos Clinicos en La Gestion LocalDocumento12 páginasProcesos Clinicos en La Gestion Localcpozop100% (1)
- Fisioterapia en Las Alteraciones Viscerales 2019 ProgramaDocumento6 páginasFisioterapia en Las Alteraciones Viscerales 2019 ProgramaKinesiologa Roxanna Villar ParraguezAún no hay calificaciones
- Facilitación Neuromuscular PropioceptivaDocumento13 páginasFacilitación Neuromuscular PropioceptivaLaura Paola Corredor NietoAún no hay calificaciones
- Evaluación y DiagnosticoDocumento10 páginasEvaluación y DiagnosticoViviana MoraAún no hay calificaciones
- Cadena cinemática: tipos y conceptos claveDocumento4 páginasCadena cinemática: tipos y conceptos claveFlorencia MarengoAún no hay calificaciones
- El Aplastamiento VertebralDocumento2 páginasEl Aplastamiento VertebralWilly PuenteAún no hay calificaciones
- Cualidades Fisicas y Psicomotrices Educación FísicaDocumento11 páginasCualidades Fisicas y Psicomotrices Educación Físicapepins poiulosAún no hay calificaciones
- BIOMECANICA PrincipiosDocumento19 páginasBIOMECANICA PrincipiosFer SosaAún no hay calificaciones
- Centro de gravedad en posición decúbitoDocumento5 páginasCentro de gravedad en posición decúbitoSheySheyAún no hay calificaciones
- Test de EvaluaciónDocumento22 páginasTest de EvaluaciónMaritza ZamudioAún no hay calificaciones
- Rehabilitación Post ACV en Adultos Mayores InstitucionalizadosDocumento10 páginasRehabilitación Post ACV en Adultos Mayores InstitucionalizadosMega KinesiologíaAún no hay calificaciones
- OsteopatiaDocumento84 páginasOsteopatiaLuaAún no hay calificaciones
- Ejercicios de KlappDocumento6 páginasEjercicios de KlappKarolina Quintana HermosillaAún no hay calificaciones
- Principio de La PeriodizaciónDocumento2 páginasPrincipio de La PeriodizaciónAngelica CubidesAún no hay calificaciones
- Imoc Tipo Cuadriplejia AtetoideDocumento4 páginasImoc Tipo Cuadriplejia Atetoidefisio_end100% (9)
- La VelocidadDocumento4 páginasLa VelocidadjimmAún no hay calificaciones
- Reeducacion de Las CervicalgiasDocumento19 páginasReeducacion de Las CervicalgiasMario OleaAún no hay calificaciones
- Rubrica Historia Clinica FisioterapiaDocumento13 páginasRubrica Historia Clinica Fisioterapiaadrian camposAún no hay calificaciones
- Estiramientos MiotendionososDocumento19 páginasEstiramientos MiotendionososLauraAún no hay calificaciones
- Capacidad Aerobica en Adultos MayoresDocumento5 páginasCapacidad Aerobica en Adultos MayorespedrocaleroAún no hay calificaciones
- Lineas MiofascialesDocumento12 páginasLineas MiofascialesAlicia Lopez OrtizAún no hay calificaciones
- Cambio PosturalDocumento9 páginasCambio PosturalHenry BarrenoAún no hay calificaciones
- Resumen Ejecutivo Al MinutoDocumento6 páginasResumen Ejecutivo Al Minutojennifer mercedesAún no hay calificaciones
- Historia Natural de La RabiaDocumento10 páginasHistoria Natural de La Rabiaangelitou2100% (1)
- Etrenamiento MuscularDocumento13 páginasEtrenamiento MuscularJohn GranadaAún no hay calificaciones
- Escoliosis 1.en - EsDocumento92 páginasEscoliosis 1.en - EsLaura Lopez100% (1)
- Guia 3 Practica de Bases y Principios DE METODOS FISOTERAPEUTICOS 2019-II 1 1Documento19 páginasGuia 3 Practica de Bases y Principios DE METODOS FISOTERAPEUTICOS 2019-II 1 1Boo3010Aún no hay calificaciones
- Teoría de La Programación MotoraDocumento22 páginasTeoría de La Programación MotoraCamila GaleanoAún no hay calificaciones
- La RodillaDocumento9 páginasLa RodillaKaren CáceresAún no hay calificaciones
- Taller Miembro Inferior ScarletDocumento15 páginasTaller Miembro Inferior ScarletdiorlingyAún no hay calificaciones
- Articulacion de La RodillaDocumento10 páginasArticulacion de La RodillaRobert Smith Beltran CarrilloAún no hay calificaciones
- Trabajo de Investigación - Tobillo y PieDocumento23 páginasTrabajo de Investigación - Tobillo y PieELi RODRÍGUEZAún no hay calificaciones
- Biomecánica de la rodillaDocumento15 páginasBiomecánica de la rodillaHarold AlfaroAún no hay calificaciones
- Analisis Del Movimiento HumanoDocumento15 páginasAnalisis Del Movimiento HumanoDanielPadillaAún no hay calificaciones
- Plantilla Tarea 3Documento8 páginasPlantilla Tarea 3eiderAún no hay calificaciones
- Programa de Derecho Tributario Aplicado 2 LcpaDocumento4 páginasPrograma de Derecho Tributario Aplicado 2 LcpaHugo VasquezAún no hay calificaciones
- PEDIATRIADocumento3 páginasPEDIATRIAMarcelo Fabian AsprelaAún no hay calificaciones
- Plantilla Plan de EvaluaciónDocumento4 páginasPlantilla Plan de EvaluaciónOscar David Velasco PereiraAún no hay calificaciones
- Domingo 19 de Diciembre de 2021 ¿Quién Soy para Que La Madre de Mi Señor Venga A VermeDocumento3 páginasDomingo 19 de Diciembre de 2021 ¿Quién Soy para Que La Madre de Mi Señor Venga A VermeJosé Antonio Morales EscobarAún no hay calificaciones
- Abstract AlgebraDocumento72 páginasAbstract Algebrasanti10sepAún no hay calificaciones
- Captura agua aire torre WarkaWater 9mDocumento2 páginasCaptura agua aire torre WarkaWater 9malberto2795Aún no hay calificaciones
- Preelaboracion y Conservacion de Carnes Aves y CazaDocumento2 páginasPreelaboracion y Conservacion de Carnes Aves y CazaDario Alejandro García GarcíaAún no hay calificaciones
- R 3Documento6 páginasR 3Javier GarciaAún no hay calificaciones
- Ventajas Económicas Del Uso de Bloques de HormigonDocumento4 páginasVentajas Económicas Del Uso de Bloques de HormigonjuanestensoAún no hay calificaciones
- Generalidades de Los Sistemas de Aprovechamiento de Energía HumanaDocumento9 páginasGeneralidades de Los Sistemas de Aprovechamiento de Energía HumanaJorge Luis Jaramillo PachecoAún no hay calificaciones
- 02 Escrito Variacion de Prision A ComparecenciaDocumento9 páginas02 Escrito Variacion de Prision A ComparecenciaCesar barea hurtadoAún no hay calificaciones
- Destrezas de Litigacion Programas de Est PDFDocumento182 páginasDestrezas de Litigacion Programas de Est PDFjocelyn kittsteinerAún no hay calificaciones
- Curso Medio Cooperativismo2Documento16 páginasCurso Medio Cooperativismo2Liss LoaizaAún no hay calificaciones
- Metodología XP: Características, pilares y fasesDocumento23 páginasMetodología XP: Características, pilares y fasesAlfonso Teran FernandezAún no hay calificaciones
- Diccionario Médico - PDF 2Documento1 páginaDiccionario Médico - PDF 2jjccmm11scribdAún no hay calificaciones
- Anexos LibreriasDocumento5 páginasAnexos LibreriasAdan Javier Cerro OroAún no hay calificaciones
- ¿A Que Se Refiere El Diagnostico ClínicoDocumento3 páginas¿A Que Se Refiere El Diagnostico ClínicoFrancelina GonzalezAún no hay calificaciones
- PREDICCION DE LA PERMEABILIDAD DPSTDocumento15 páginasPREDICCION DE LA PERMEABILIDAD DPSTDiego Suárez GutiérrezAún no hay calificaciones
- FFII-problemas Resueltos Tema 2Documento25 páginasFFII-problemas Resueltos Tema 2Pepe loanAún no hay calificaciones
- Power Point Vitaminas y MineralesDocumento58 páginasPower Point Vitaminas y MineralesSANDRA YULIANA SANCHEZ QUICENOAún no hay calificaciones
- TIPOS DE LINEAS Dibujo Asistido Por Computadora.Documento8 páginasTIPOS DE LINEAS Dibujo Asistido Por Computadora.Francisco Tonatiuh Ortiz ArroyoAún no hay calificaciones
- Proyecto de Instalación Eléctrica en Baja Tensión Con SubestaciónDocumento42 páginasProyecto de Instalación Eléctrica en Baja Tensión Con SubestaciónEmilioAntonioJimenezFloresAún no hay calificaciones
- Calendario de actividades para el éxito en tu aprendizajeDocumento6 páginasCalendario de actividades para el éxito en tu aprendizajeDURLEY AMPARO ORREGO HERNANDEZAún no hay calificaciones
- Practica Metodo de RichieDocumento8 páginasPractica Metodo de RichieIvonne CoyotziAún no hay calificaciones
- Planificación Anual de CS. Sociales. Ciclo 2022.Documento9 páginasPlanificación Anual de CS. Sociales. Ciclo 2022.yamila legalAún no hay calificaciones
- Partes de Una Publicacion EditorialDocumento12 páginasPartes de Una Publicacion EditorialOrlando Moreno RamirezAún no hay calificaciones