También podría gustarte
- Carta Del Año 2070Documento25 páginasCarta Del Año 2070pumis100% (23)
- Recuperación de Aguas de Procesos Mineros Por Tecnología de MembranasDocumento3 páginasRecuperación de Aguas de Procesos Mineros Por Tecnología de MembranasHugo Hernan Mamani ChiquiAún no hay calificaciones
- PETROLOGIADocumento1 páginaPETROLOGIAHugo Hernan Mamani ChiquiAún no hay calificaciones
- ScandalDocumento1 páginaScandalHugo Hernan Mamani ChiquiAún no hay calificaciones
- VANTAJASDocumento2 páginasVANTAJASHugo Hernan Mamani ChiquiAún no hay calificaciones
- Criterios para de La Operación de PerforacionDocumento4 páginasCriterios para de La Operación de PerforacionHugo Hernan Mamani ChiquiAún no hay calificaciones
- Cloruro de SodioDocumento1 páginaCloruro de SodioHugo Hernan Mamani ChiquiAún no hay calificaciones
- Trabajo Final Gestion de Producion y L.M.Documento32 páginasTrabajo Final Gestion de Producion y L.M.Hugo Hernan Mamani ChiquiAún no hay calificaciones
- 1CURRICULO RICHARD RONALD CCALLO JINEZ Ayudante Perforista PDFDocumento2 páginas1CURRICULO RICHARD RONALD CCALLO JINEZ Ayudante Perforista PDFHugo Hernan Mamani ChiquiAún no hay calificaciones
- CARATULADocumento1 páginaCARATULAHugo Hernan Mamani ChiquiAún no hay calificaciones
- Dibujo 2Documento1 páginaDibujo 2Hugo Hernan Mamani ChiquiAún no hay calificaciones
- Faja TransportadoraDocumento5 páginasFaja TransportadoraHugo Hernan Mamani ChiquiAún no hay calificaciones
- Universidad Nacional Del AltiplanoDocumento21 páginasUniversidad Nacional Del AltiplanoHugo Hernan Mamani ChiquiAún no hay calificaciones
- Camara y PilaresDocumento4 páginasCamara y PilaresOMEGA492Aún no hay calificaciones
- Corzo Remigio Amelia Impacto Mineros PDFDocumento158 páginasCorzo Remigio Amelia Impacto Mineros PDFYanina S JCAún no hay calificaciones
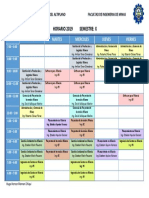
- Horario 2019Documento1 páginaHorario 2019Hugo Hernan Mamani ChiquiAún no hay calificaciones
- ResistenciaArcillaPilaresSEODocumento7 páginasResistenciaArcillaPilaresSEOHugo Hernan Mamani ChiquiAún no hay calificaciones
- Universidad Nacional Del AltiplanoDocumento21 páginasUniversidad Nacional Del AltiplanoHugo Hernan Mamani ChiquiAún no hay calificaciones
- Camara y PilaresDocumento4 páginasCamara y PilaresOMEGA492Aún no hay calificaciones
- Contraeña de Faceboock:aless4523rec Usuario 956024536Documento1 páginaContraeña de Faceboock:aless4523rec Usuario 956024536Hugo Hernan Mamani ChiquiAún no hay calificaciones
- Ingles A EspañolDocumento24 páginasIngles A EspañolHugo Hernan Mamani ChiquiAún no hay calificaciones
- Contraeña de Faceboock:aless4523rec Usuario 956024536Documento1 páginaContraeña de Faceboock:aless4523rec Usuario 956024536Hugo Hernan Mamani ChiquiAún no hay calificaciones
- Tecnicas de RedaccionDocumento7 páginasTecnicas de RedaccionHugo Hernan Mamani ChiquiAún no hay calificaciones
- Camara y PilaresDocumento4 páginasCamara y PilaresOMEGA492Aún no hay calificaciones
- Clase VDocumento25 páginasClase VHugo Hernan Mamani ChiquiAún no hay calificaciones
- Universidad Andina Nestor Caseres VelasquezDocumento30 páginasUniversidad Andina Nestor Caseres VelasquezHugo Hernan Mamani ChiquiAún no hay calificaciones
- Metodos de Muetreo de Calidad de Aire y RuidoDocumento22 páginasMetodos de Muetreo de Calidad de Aire y RuidoHugo Hernan Mamani ChiquiAún no hay calificaciones
- Marco TeoricoDocumento11 páginasMarco TeoricoHugo Hernan Mamani ChiquiAún no hay calificaciones
- Registro LinealDocumento1 páginaRegistro LinealHugo Hernan Mamani ChiquiAún no hay calificaciones
- 1er Trabajo Administracion PDFDocumento53 páginas1er Trabajo Administracion PDFHugo Hernan Mamani ChiquiAún no hay calificaciones
- Viaje A Las Regiones Equinocciales Del Nuevo Continente Tomo 1 Libro PrimeroDocumento267 páginasViaje A Las Regiones Equinocciales Del Nuevo Continente Tomo 1 Libro PrimeroLisbeth RomeroAún no hay calificaciones
- Diseño de BocatomaDocumento10 páginasDiseño de BocatomaLUIS ALBERTO CORDOVA AGUILARAún no hay calificaciones
- Publicacion de Sedes BXM 02-2021 0Documento2 páginasPublicacion de Sedes BXM 02-2021 0StevenAún no hay calificaciones
- Proyecto Final MetrologiaDocumento11 páginasProyecto Final MetrologiaMarcelo San Martin100% (2)
- Suelos ProblemasDocumento103 páginasSuelos Problemasyesyonpa100% (2)
- Infografia - Arquitectura y LuzDocumento1 páginaInfografia - Arquitectura y LuzJOEL RODRIGO FERNANDEZ BACA SALASAún no hay calificaciones
- Prostodoncias Parciales FlexiblesDocumento32 páginasProstodoncias Parciales FlexiblesOskar GomezAún no hay calificaciones
- Introduccion Al Trabajo ExperimentalDocumento9 páginasIntroduccion Al Trabajo ExperimentalSebastian Orrego UrreaAún no hay calificaciones
- Métodos coulombimétricos de análisis químicoDocumento4 páginasMétodos coulombimétricos de análisis químicoDaniela Madera LópezAún no hay calificaciones
- 100000T02L CalculoAplicadoALaFisica1Documento10 páginas100000T02L CalculoAplicadoALaFisica1anon_927365513Aún no hay calificaciones
- S04-T-Práctica - de - Cinemática LinealDocumento12 páginasS04-T-Práctica - de - Cinemática LinealJamesAún no hay calificaciones
- Asignación #1 Termodinamica 2Documento7 páginasAsignación #1 Termodinamica 2joshepAún no hay calificaciones
- Sistema de Gestión AcadémicoDocumento2 páginasSistema de Gestión AcadémicoDavid Paolo Rocha JaureguiAún no hay calificaciones
- EXÁMENES DE GRADO QUÍMICADocumento49 páginasEXÁMENES DE GRADO QUÍMICATopaciaHernandezAún no hay calificaciones
- 21 Secretos Sobre Cómo Los Millonarios Crearon Sus FortunasDocumento8 páginas21 Secretos Sobre Cómo Los Millonarios Crearon Sus FortunasRayCal100% (1)
- Taller Curvas de InmunidadDocumento6 páginasTaller Curvas de InmunidadFercho RamirezAún no hay calificaciones
- Instrumentacion IndustrialDocumento15 páginasInstrumentacion IndustrialHassid LarradaAún no hay calificaciones
- 03 Capitulo #3 Tretratamientos PDFDocumento16 páginas03 Capitulo #3 Tretratamientos PDFIverton TCAún no hay calificaciones
- Memoria Descriptiva DesarenadorDocumento3 páginasMemoria Descriptiva DesarenadorCarlosRR2100% (1)
- Sostenimiento 2014Documento509 páginasSostenimiento 2014Minyoda100% (5)
- Clase 1Documento25 páginasClase 1Maria VergaraAún no hay calificaciones
- Alineamiento Láser Ejes MáquinasDocumento14 páginasAlineamiento Láser Ejes MáquinasBladimir Jesus Vasquez AlaveAún no hay calificaciones
- Agente de CambioDocumento6 páginasAgente de Cambiopanders23Aún no hay calificaciones
- Un VAR Tiene, en General, La Siguiente EspecificaciónDocumento4 páginasUn VAR Tiene, en General, La Siguiente EspecificaciónJhulmer DominguezAún no hay calificaciones
- Aptitup AbtractaDocumento95 páginasAptitup AbtractaluisafredochicaizaAún no hay calificaciones
- ACUEDUCTOSDocumento54 páginasACUEDUCTOSRoman Soto SanchezAún no hay calificaciones
- Inta Paralisis Cerosa en Bulbos de AjoDocumento13 páginasInta Paralisis Cerosa en Bulbos de AjoACBAún no hay calificaciones
- AMPDocumento8 páginasAMPyago21100% (2)
- Termino de Referencia - Estudio de Mecanica de SuelosDocumento8 páginasTermino de Referencia - Estudio de Mecanica de SuelosFreddy ArosquipaAún no hay calificaciones
- Importancia de La Elección de Un Buen Combustible en Las CalderasDocumento10 páginasImportancia de La Elección de Un Buen Combustible en Las Calderasguanas13Aún no hay calificaciones