También podría gustarte
- Resistencia eléctrica: qué es y código de coloresDocumento9 páginasResistencia eléctrica: qué es y código de coloresArvey MedinaAún no hay calificaciones
- CURSO de ELECTRONICA BASICA Resistencia Capacitores Inductores DiodosDocumento12 páginasCURSO de ELECTRONICA BASICA Resistencia Capacitores Inductores DiodosJuan Carlos Valencia YanaricoAún no hay calificaciones
- Curso Reparacion de Celulares 1 (Hardware)Documento99 páginasCurso Reparacion de Celulares 1 (Hardware)pabloAún no hay calificaciones
- Como Probar ElectronicosDocumento7 páginasComo Probar ElectronicosAnonymous f8NjntbOAún no hay calificaciones
- Curso de Reparacion de CelularesDocumento97 páginasCurso de Reparacion de Celularesalberto pinedaAún no hay calificaciones
- Manual de Operación Multímetro UT89X UT89XDDocumento2 páginasManual de Operación Multímetro UT89X UT89XDGregor Rojas100% (1)
- Seminario de Telefonos CelularesDocumento112 páginasSeminario de Telefonos CelularesLuisillo HerAún no hay calificaciones
- BANCO DE PRUEBA PARA FUENTES CONMUTADAS - Este Método de Prueba No Es Aplicable A Algunas Fuentes Conmutadas Que UtilizanDocumento3 páginasBANCO DE PRUEBA PARA FUENTES CONMUTADAS - Este Método de Prueba No Es Aplicable A Algunas Fuentes Conmutadas Que UtilizanFélix Takey KobataAún no hay calificaciones
- Fundamentos de ElectronicaDocumento12 páginasFundamentos de ElectronicaYorvis De La O TapiaAún no hay calificaciones
- Cómo Aprender Electrónica Desde CeroDocumento65 páginasCómo Aprender Electrónica Desde CeroAlexis quintasAún no hay calificaciones
- Presentación Placa Electrónica Equipo Todo NadaDocumento34 páginasPresentación Placa Electrónica Equipo Todo Nadamonica cuevas100% (1)
- Como Usar Un MultímetroDocumento11 páginasComo Usar Un MultímetroEdwin J. Carlos Jimenez100% (1)
- Clase 1 de Electronica PDFDocumento27 páginasClase 1 de Electronica PDFCristianJhonAún no hay calificaciones
- Manucel 234 T 5 OkDocumento73 páginasManucel 234 T 5 Ok160477Aún no hay calificaciones
- Curso DC CelularDocumento77 páginasCurso DC CelularLibardo Perdomo Chona100% (1)
- Microsoldadura Básico Intermedio Nivel ElectronicoDocumento84 páginasMicrosoldadura Básico Intermedio Nivel ElectronicoNolberto Matias Del PuertoAún no hay calificaciones
- Componentes ElectronicosDocumento12 páginasComponentes ElectronicosSebastianAún no hay calificaciones
- Manual de Perdidas de DistribucionDocumento37 páginasManual de Perdidas de DistribucionJose Luis MamaniAún no hay calificaciones
- Manual de Usuario Print3DBotDocumento26 páginasManual de Usuario Print3DBotPelon SinpeloAún no hay calificaciones
- Fuente de TensionDocumento12 páginasFuente de TensionEder ParedesAún no hay calificaciones
- Electronica Basica C. E. FranzDocumento56 páginasElectronica Basica C. E. FranzHaroldReynaldoChuraAún no hay calificaciones
- Dossier Tec - LavadorasDocumento8 páginasDossier Tec - LavadorasLuis Miguel Nuñez CastroAún no hay calificaciones
- Curso de Reparacion de BombillosDocumento34 páginasCurso de Reparacion de BombillosCesar FloresAún no hay calificaciones
- Guía rápida de simulación electrónicaDocumento9 páginasGuía rápida de simulación electrónicaDonald ChurchAún no hay calificaciones
- Proyecto de Alarma Con SCRDocumento13 páginasProyecto de Alarma Con SCRMarlon Montenegro0% (1)
- Curso Restructurado El SalvadorDocumento83 páginasCurso Restructurado El SalvadorDominik Mielczarek100% (1)
- Practica Fallas Transistores y Par DarlingtonDocumento4 páginasPractica Fallas Transistores y Par DarlingtonJuan LizamaAún no hay calificaciones
- Conceptos y Criterios para Determinar El Tamaño de Transformadores en El Sector ResidencialDocumento9 páginasConceptos y Criterios para Determinar El Tamaño de Transformadores en El Sector ResidencialGere ValeAún no hay calificaciones
- Cálculo de Cargas en El HogarDocumento2 páginasCálculo de Cargas en El HogarGenetrix SawersAún no hay calificaciones
- Cambio de Glass O Tactil: Sellado Conlamina Oca O Uve LocaDocumento39 páginasCambio de Glass O Tactil: Sellado Conlamina Oca O Uve LocaM skiviasAún no hay calificaciones
- Metodo de Los Mvas, Thevenin y EtapDocumento27 páginasMetodo de Los Mvas, Thevenin y EtapJosé Gonzalo VelasquezAún no hay calificaciones
- Curso Electrónica y TV INFOTEPDocumento51 páginasCurso Electrónica y TV INFOTEPIsntituto San RafaelAún no hay calificaciones
- Informe Menacho 1Documento11 páginasInforme Menacho 1Ivan Quinones RAún no hay calificaciones
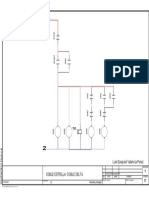
- Circuito eléctrico doble estrella doble deltaDocumento1 páginaCircuito eléctrico doble estrella doble deltaEzequiel Valencia100% (1)
- Informe Laboratorio Nº2, Relé de SobrecorrienteDocumento12 páginasInforme Laboratorio Nº2, Relé de SobrecorrienteRoberto Daniel PasteneAún no hay calificaciones
- Manual de Mantenimiento y Reparación de Celulares Parte 3Documento20 páginasManual de Mantenimiento y Reparación de Celulares Parte 3FranzEduardoMartinezBarbozaAún no hay calificaciones
- Practica Arrancador para Motor ElectricoDocumento4 páginasPractica Arrancador para Motor Electricodaniel_pulido_63Aún no hay calificaciones
- Resumen de Electricidad DomiciliariaDocumento11 páginasResumen de Electricidad DomiciliariaFelipe Hormazabal TrinaAún no hay calificaciones
- Pasos Revisión de TVDocumento4 páginasPasos Revisión de TVjoserafelAún no hay calificaciones
- Ficha Tecnica Bitel b8306Documento1 páginaFicha Tecnica Bitel b8306Carlos CartagenaAún no hay calificaciones
- Transmisión de energía eléctrica alternaDocumento39 páginasTransmisión de energía eléctrica alternadario castellani100% (1)
- Corto Circuito V1-Diciembre2019Documento144 páginasCorto Circuito V1-Diciembre2019Jorge Alberto LTAún no hay calificaciones
- Fuente simétrica 24VDocumento7 páginasFuente simétrica 24VDiego PirelaAún no hay calificaciones
- Electricidad Basica 1Documento104 páginasElectricidad Basica 1priva002Aún no hay calificaciones
- Curso reparación celulares microelectrónica nivel intermedioDocumento6 páginasCurso reparación celulares microelectrónica nivel intermedioromario aguilarAún no hay calificaciones
- Motor SaverDocumento0 páginasMotor SaverFredy Martínez GonzaloAún no hay calificaciones
- Reguladores de TensionDocumento55 páginasReguladores de TensionAndres HerreraAún no hay calificaciones
- Aparatos ElectrodomesticosDocumento9 páginasAparatos ElectrodomesticosMario NuñezAún no hay calificaciones
- Apuntes ElectricidadDocumento18 páginasApuntes ElectricidadJuan ColladoAún no hay calificaciones
- Transistor y UsosDocumento15 páginasTransistor y UsosSuperdotado JimAún no hay calificaciones
- Electronica Basica y Componentes Electronicos Temario m15Documento49 páginasElectronica Basica y Componentes Electronicos Temario m15marvingaitan1991Aún no hay calificaciones
- Arranque Con AutotransformadorDocumento25 páginasArranque Con AutotransformadorBryan AndresAún no hay calificaciones
- Tarea3 U2 Elvis ValenzuelaDocumento9 páginasTarea3 U2 Elvis ValenzuelaCiberSpieCoyhaiqueAún no hay calificaciones
- TCDocumento42 páginasTCVicente AriasAún no hay calificaciones
- PLC - Informacion GeneralDocumento46 páginasPLC - Informacion GeneralGilberto MottoAún no hay calificaciones
- Programación motor cortina SOMFYDocumento2 páginasProgramación motor cortina SOMFYRomina Gorbea GranielAún no hay calificaciones
- Símbolos Básicos de Electricidad y ElectrónicaDocumento2 páginasSímbolos Básicos de Electricidad y ElectrónicaRoni Dominguez0% (1)
- Reparación tarjeta de arranque automotriz caracteresDocumento23 páginasReparación tarjeta de arranque automotriz caracteresgtt26Aún no hay calificaciones
- Curso práctico reparación celularesDocumento5 páginasCurso práctico reparación celularesJenny Huancas Romero100% (1)
- Lo Que Hay Que Saber Sobre La Música en La Edad MediaDocumento3 páginasLo Que Hay Que Saber Sobre La Música en La Edad MediaJuan Carlo Crespo QuirozAún no hay calificaciones
- Arreglo SDocumento1 páginaArreglo SKaren CuestaAún no hay calificaciones
- SequencesDocumento1 páginaSequencesJuan Carlo Crespo QuirozAún no hay calificaciones
- Lo Que Hay Que Saber Sobre La Música en La Edad MediaDocumento3 páginasLo Que Hay Que Saber Sobre La Música en La Edad MediaJuan Carlo Crespo QuirozAún no hay calificaciones
- Programación en EscaleraDocumento6 páginasProgramación en EscaleraEstefany CanazaAún no hay calificaciones
- TutorJava Nivel BásicoDocumento21 páginasTutorJava Nivel BásicoJuan Carlo Crespo QuirozAún no hay calificaciones
- Reglas 09Documento1 páginaReglas 09Juan Carlo Crespo QuirozAún no hay calificaciones
- E DatosDocumento56 páginasE DatosJuan Carlo Crespo QuirozAún no hay calificaciones
- Reglas 10Documento1 páginaReglas 10Juan Carlo Crespo QuirozAún no hay calificaciones
- Ejer Cici OsDocumento7 páginasEjer Cici OsJuan Carlo Crespo QuirozAún no hay calificaciones
- Coleccion ProbDocumento25 páginasColeccion ProbJuan Carlo Crespo QuirozAún no hay calificaciones
- Calculo de Las Características de Motores de DCDocumento6 páginasCalculo de Las Características de Motores de DCdrame777Aún no hay calificaciones
- Esq AlgoritDocumento96 páginasEsq AlgoritJuan Carlo Crespo QuirozAún no hay calificaciones
- Como DocumentarDocumento4 páginasComo DocumentarquobadiAún no hay calificaciones
- Java Primer Modulo PooDocumento14 páginasJava Primer Modulo PooJuan Carlo Crespo QuirozAún no hay calificaciones
- Ejer Cici OsDocumento7 páginasEjer Cici OsJuan Carlo Crespo QuirozAún no hay calificaciones
- Lineas Capitulo 8Documento33 páginasLineas Capitulo 8Carlos Mario LopezAún no hay calificaciones
- 3 PlanosDocumento221 páginas3 PlanosJuan Carlo Crespo QuirozAún no hay calificaciones
- Wa0000Documento55 páginasWa0000Juan Carlo Crespo QuirozAún no hay calificaciones
- Wa0015Documento10 páginasWa0015Juan Carlo Crespo QuirozAún no hay calificaciones
- Escuela Superior Politécnica de Chimborazo: Facultad de Informática Y ElectrónicaDocumento122 páginasEscuela Superior Politécnica de Chimborazo: Facultad de Informática Y ElectrónicaMilagros Quiñones MarrerosAún no hay calificaciones
- ModelamientoDocumento2 páginasModelamientoJuan Carlo Crespo QuirozAún no hay calificaciones
- Wa0015Documento10 páginasWa0015Juan Carlo Crespo QuirozAún no hay calificaciones
- Ensamblaje de ComputadorasDocumento72 páginasEnsamblaje de ComputadorasJuan Carlo Crespo QuirozAún no hay calificaciones
- InteligenciaDocumento7 páginasInteligenciaquobadiAún no hay calificaciones
- El TornoDocumento15 páginasEl TornoquobadiAún no hay calificaciones
- Bobinado TrifasicoDocumento10 páginasBobinado TrifasicoJuan Carlo Crespo QuirozAún no hay calificaciones
- Soldadura OxiacetilénicaDocumento6 páginasSoldadura OxiacetilénicaJuan Carlo Crespo QuirozAún no hay calificaciones
- Motor TrifasicoDocumento10 páginasMotor TrifasicoJuan Carlo Crespo QuirozAún no hay calificaciones
- Inf 5 CDocumento6 páginasInf 5 CLUIS ENRIQUE CHUSINO CHABLAAún no hay calificaciones
- Universoarduino - .15 Proyectos D - Jose Vicente Garlito AvilesDocumento75 páginasUniversoarduino - .15 Proyectos D - Jose Vicente Garlito AvilesSantiago BerrocalAún no hay calificaciones
- Fundamentos Electronica BasicaDocumento13 páginasFundamentos Electronica BasicaRubn Almanza Tovio0% (1)
- NGK Berylco Catalogue EsDocumento6 páginasNGK Berylco Catalogue Esgustavo PabloAún no hay calificaciones
- Código de colores resistenciasDocumento16 páginasCódigo de colores resistenciasyeimirisAún no hay calificaciones
- Proyecto #1Documento35 páginasProyecto #1Alina MoraAún no hay calificaciones
- Física S5 - IIIB - 2022Documento31 páginasFísica S5 - IIIB - 2022Okay?Aún no hay calificaciones
- Astm D 5882 TraducciónDocumento7 páginasAstm D 5882 TraducciónFernanda JuncoAún no hay calificaciones
- Instrumento de Evaluacion 3Documento16 páginasInstrumento de Evaluacion 3waldirAún no hay calificaciones
- 1.1.4 Resistencias para CalefaccionDocumento15 páginas1.1.4 Resistencias para CalefaccionAbdiell Cabrera SanchezAún no hay calificaciones
- LAB 3 - Ley de Ohm Final PDFDocumento10 páginasLAB 3 - Ley de Ohm Final PDFjean paul Carhuallanqui RomeroAún no hay calificaciones
- Im Ex260-Sil1 Smw81esDocumento2 páginasIm Ex260-Sil1 Smw81esRicardo Daniel Martinez HernandezAún no hay calificaciones
- Tarea Fisica 5 UnidadDocumento3 páginasTarea Fisica 5 Unidadsteven luis lira monterolaAún no hay calificaciones
- Tipos sensores ópticosDocumento19 páginasTipos sensores ópticosBenja HernandezAún no hay calificaciones
- Sensores Cap 1y2Documento43 páginasSensores Cap 1y2Miguel DuránAún no hay calificaciones
- Guia de Practica N 8Documento6 páginasGuia de Practica N 8JhonnyEdgardParionaCamposAún no hay calificaciones
- Prueba Resistencia Ohmica PDFDocumento15 páginasPrueba Resistencia Ohmica PDFJuan David Garcia VelazquezAún no hay calificaciones
- Reparación de dispositivos electrónicos: Guía básica de microsoldaduraDocumento70 páginasReparación de dispositivos electrónicos: Guía básica de microsoldadurajdfjfdAún no hay calificaciones
- Analisis de Sistemas SeñalesDocumento14 páginasAnalisis de Sistemas SeñalesLuis Alejandro CalderonAún no hay calificaciones
- Medición eléctrica y resistores en serie y paraleloDocumento11 páginasMedición eléctrica y resistores en serie y paraleloCarlos Andres Palomino MarinAún no hay calificaciones
- Ejercicios de Desigualdades - 2015 - CorregidaDocumento1 páginaEjercicios de Desigualdades - 2015 - Corregidaggonzalg5742Aún no hay calificaciones
- Reglas de KirchhoffDocumento10 páginasReglas de KirchhoffDanilo JoseAún no hay calificaciones
- La Fuente de Energía y La Ley de Ohm.Documento3 páginasLa Fuente de Energía y La Ley de Ohm.Miguel L. ToledanoAún no hay calificaciones
- Universidad Autónoma de Nuevo León: Facultad de Ingeniería Mecánica Y EléctricaDocumento162 páginasUniversidad Autónoma de Nuevo León: Facultad de Ingeniería Mecánica Y EléctricaJORGE BRIÑEZAún no hay calificaciones
- Práctica1 FundamentosElectricos Domingo8DeOctubreDel2017 FormatoIEEEDocumento7 páginasPráctica1 FundamentosElectricos Domingo8DeOctubreDel2017 FormatoIEEEDaniel Peña100% (2)
- Piano ElectricoDocumento6 páginasPiano ElectricoEdu Gumer Caceres Huaman0% (1)
- Granito y Marmol PDFDocumento17 páginasGranito y Marmol PDFivanhernandezgenovezAún no hay calificaciones
- Investigacion 1-4Documento6 páginasInvestigacion 1-4Javier Alonso Ruiz DimasAún no hay calificaciones
- 6 2 PresionDocumento42 páginas6 2 PresionvladimirAún no hay calificaciones
- PotenciometroDocumento2 páginasPotenciometroYokastaAún no hay calificaciones