También podría gustarte
- Automotive Electronic Diagnostics (Course 2)De EverandAutomotive Electronic Diagnostics (Course 2)Calificación: 4 de 5 estrellas4/5 (2)
- Control EngineeringDocumento19 páginasControl EngineeringAmirul Zahim AzharAún no hay calificaciones
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisDe EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisCalificación: 4 de 5 estrellas4/5 (2)
- Motorised Screw JackDocumento4 páginasMotorised Screw JackhidaiAún no hay calificaciones
- BELT CALCULATIONS Smart Motion Cheat SheetDocumento6 páginasBELT CALCULATIONS Smart Motion Cheat Sheetpavan222eeeAún no hay calificaciones
- CustomPC 2023-2 PDFDocumento100 páginasCustomPC 2023-2 PDFTavimmmmmAún no hay calificaciones
- Servo Motor ControlDocumento72 páginasServo Motor ControlTien-Thinh NguyenAún no hay calificaciones
- AC Servo SystemsDocumento42 páginasAC Servo SystemsLe Hai Dang100% (1)
- Electric Motor Control: DC, AC, and BLDC MotorsDe EverandElectric Motor Control: DC, AC, and BLDC MotorsCalificación: 4.5 de 5 estrellas4.5/5 (19)
- Precision Bias: Every Astm Test Method Requires A AND Section. What Is It? How Do I Create One? Read OnDocumento4 páginasPrecision Bias: Every Astm Test Method Requires A AND Section. What Is It? How Do I Create One? Read Onjrlr65Aún no hay calificaciones
- Administering Oracle Database Exadata Cloud ServiceDocumento200 páginasAdministering Oracle Database Exadata Cloud ServiceMuneeza HashmiAún no hay calificaciones
- Speed Control of Stepper MotorDocumento63 páginasSpeed Control of Stepper MotorMohammad Ismail Hossain (Sujohn)100% (4)
- Automatic Solar Tracker SystemDocumento8 páginasAutomatic Solar Tracker SystemAbhay TiwariAún no hay calificaciones
- (REPORT) - Automatic Sun Tracking SystemDocumento14 páginas(REPORT) - Automatic Sun Tracking SystemPrashant Kumar100% (1)
- Machine Condition Monitoring Project Final ReportDocumento11 páginasMachine Condition Monitoring Project Final ReportSivasidharth EzhilAún no hay calificaciones
- REspuestas Quiz CP4AUTOMATIONDocumento10 páginasREspuestas Quiz CP4AUTOMATIONMax Lee100% (1)
- Updated Self Balancing Report (F16mte28)Documento25 páginasUpdated Self Balancing Report (F16mte28)Shahrukh Aleem JhatialAún no hay calificaciones
- GPS and GSM Based Vehicle Tracking SystemDocumento16 páginasGPS and GSM Based Vehicle Tracking SystemShreyas Sridhar0% (2)
- ECE Automatic Sun Tracking System ASTS ReportDocumento18 páginasECE Automatic Sun Tracking System ASTS ReportPriyanka PriyaAún no hay calificaciones
- Sun Tracking System ReportDocumento15 páginasSun Tracking System ReportNibil Ck ßžAún no hay calificaciones
- Automatic Sun Tracking System - ASTSDocumento15 páginasAutomatic Sun Tracking System - ASTSAkramAún no hay calificaciones
- Automatic Sun Tracking System - ASTSDocumento15 páginasAutomatic Sun Tracking System - ASTSAmit DebnathAún no hay calificaciones
- HM Hu201Documento24 páginasHM Hu201mainak.chakraborty2005Aún no hay calificaciones
- Automatic Sun TrackingDocumento10 páginasAutomatic Sun TrackingMichalina BiałekAún no hay calificaciones
- Solar Tracking System With GSM Monitoring: Report On Stepper Motor DriverDocumento30 páginasSolar Tracking System With GSM Monitoring: Report On Stepper Motor DriverRam PrasathAún no hay calificaciones
- Automatic Sun Tracking System For Solar Panels: - by Pavnesh PriyadershiDocumento23 páginasAutomatic Sun Tracking System For Solar Panels: - by Pavnesh PriyadershiPAVNESH PRIYADERSHIAún no hay calificaciones
- Computer Integrated Design and ManufacturingDocumento16 páginasComputer Integrated Design and ManufacturingPrajwal JaiswalAún no hay calificaciones
- Literature Review On Automatic Sun Tracking SystemDocumento4 páginasLiterature Review On Automatic Sun Tracking SystemafmabbpoksbfdpAún no hay calificaciones
- The Smart Motion Cheat SheetDocumento6 páginasThe Smart Motion Cheat Sheettonysworld_89Aún no hay calificaciones
- Aparent ProjectDocumento14 páginasAparent ProjectbernabasAún no hay calificaciones
- Helianthus: The Solar Tracking SystemDocumento17 páginasHelianthus: The Solar Tracking SystemSampath KumarAún no hay calificaciones
- ABS User ManualDocumento40 páginasABS User ManualAntonio NavarreteAún no hay calificaciones
- Smart Motion Cheat SheetDocumento6 páginasSmart Motion Cheat SheetSerx Armendariz100% (1)
- IOT Project Report: Solar Panel Monitoring SystemDocumento13 páginasIOT Project Report: Solar Panel Monitoring SystemAnushka ShahAún no hay calificaciones
- AEE-2016-14-FinalReport Antenna StabDocumento20 páginasAEE-2016-14-FinalReport Antenna StabpranavAún no hay calificaciones
- WojcikDocumento118 páginasWojcikRedBanditAún no hay calificaciones
- Accident Protection System Using Electromagnetic Abs Braking SystemDocumento26 páginasAccident Protection System Using Electromagnetic Abs Braking SystemCODING CHANNELAún no hay calificaciones
- UTD Autonomous Underwater Vehicle: Michael Giambalvo, Ed Paradis, Eric SumnerDocumento7 páginasUTD Autonomous Underwater Vehicle: Michael Giambalvo, Ed Paradis, Eric SumnernntoolAún no hay calificaciones
- Asi 03 00024 v2 PDFDocumento19 páginasAsi 03 00024 v2 PDFccAún no hay calificaciones
- Review Sun Tracking System 1Documento22 páginasReview Sun Tracking System 1Karthik MalladiAún no hay calificaciones
- Induction Motor Speed Control Using Fuzzy Logic Controller: AbstractDocumento15 páginasInduction Motor Speed Control Using Fuzzy Logic Controller: AbstractAvinash VenkatAún no hay calificaciones
- Motion DetectorDocumento83 páginasMotion DetectorAshish GargAún no hay calificaciones
- Principal of Operation Implementation Overview Objectives of The Thesis Basic HardwareDocumento4 páginasPrincipal of Operation Implementation Overview Objectives of The Thesis Basic HardwareAbul KashemAún no hay calificaciones
- DOC-202317Documento23 páginasDOC-202317nittinmohanty.nmAún no hay calificaciones
- Car Parking DocumentationDocumento11 páginasCar Parking Documentationaenuguprasadrao67% (3)
- hệ thống kích từ trong nhà máy thủy điệnDocumento344 páginashệ thống kích từ trong nhà máy thủy điệnTung NguyenAún no hay calificaciones
- Automated Guided VehicleDocumento4 páginasAutomated Guided VehicleGaurav UmarAún no hay calificaciones
- Inside Auto Tuning Algorithms For ServosDocumento5 páginasInside Auto Tuning Algorithms For ServosKwansoo LimAún no hay calificaciones
- Speed Control of Induction Motor Using Fuzzy LogicDocumento4 páginasSpeed Control of Induction Motor Using Fuzzy LogicEditor IJRITCCAún no hay calificaciones
- Image Processing of Sidescan SonarDocumento7 páginasImage Processing of Sidescan SonarAlex NicksonAún no hay calificaciones
- Active Magnetic Bearings (AMB) : Submitted To: Submitted byDocumento12 páginasActive Magnetic Bearings (AMB) : Submitted To: Submitted byHod of ME PRRMAún no hay calificaciones
- Controls Final ReportDocumento14 páginasControls Final Reportapi-244906204Aún no hay calificaciones
- Seesaw Report GMIT 2011 (Physics and Instrumentation Course)Documento55 páginasSeesaw Report GMIT 2011 (Physics and Instrumentation Course)kaineuhausAún no hay calificaciones
- Transient Stability Analysis Using MiPowerDocumento5 páginasTransient Stability Analysis Using MiPowerBhavik Prajapati100% (1)
- CNC Mid 2 KeyDocumento6 páginasCNC Mid 2 Keypala srinivas reddyAún no hay calificaciones
- Research Paper Servo MotorDocumento6 páginasResearch Paper Servo Motorc9rz4vrm100% (1)
- Automatic Rain Operated WiperDocumento20 páginasAutomatic Rain Operated WiperVincent Paul100% (1)
- Evaluation of Progressive Deterioration of A Squirrel-Cage Rotor, With A Condition Monitoring System That Implements The Sideband MethodologyDocumento6 páginasEvaluation of Progressive Deterioration of A Squirrel-Cage Rotor, With A Condition Monitoring System That Implements The Sideband MethodologyLeo ArguijoAún no hay calificaciones
- Solartrackingsystem 121110013734 Phpapp02 NewDocumento23 páginasSolartrackingsystem 121110013734 Phpapp02 NewManjunath ThamminidiAún no hay calificaciones
- 6 Engine Computer Systems2Documento36 páginas6 Engine Computer Systems2Khairulz AnuarAún no hay calificaciones
- RobotDocumento18 páginasRobotapi-300538773Aún no hay calificaciones
- LAB Report 7Documento18 páginasLAB Report 7razakhan5114Aún no hay calificaciones
- Koyo DL205 Power CalculationDocumento2 páginasKoyo DL205 Power CalculationiedmondAún no hay calificaciones
- Tps60403-q1 (Charge Pump) Signal CondDocumento29 páginasTps60403-q1 (Charge Pump) Signal CondCH Pavan KumarAún no hay calificaciones
- PHP BitsDocumento24 páginasPHP BitskarunakarAún no hay calificaciones
- Tutorial-3 With SolutionsDocumento3 páginasTutorial-3 With SolutionsSandesh RSAún no hay calificaciones
- Treacy WiersemaDocumento7 páginasTreacy WiersemaRiya BlanciaAún no hay calificaciones
- Operation & Maintenance ManualDocumento3 páginasOperation & Maintenance ManualAhmed TitawiAún no hay calificaciones
- WWW - Ykkap Agen - Com NEXSTA CatalogDocumento33 páginasWWW - Ykkap Agen - Com NEXSTA CatalogXaverius NandaAún no hay calificaciones
- The Concept of "At Work"Documento17 páginasThe Concept of "At Work"Gerel Ann Lapatar TranquilleroAún no hay calificaciones
- Inv 27113Documento2 páginasInv 27113joakim KiambaAún no hay calificaciones
- PRINCE2 Quality Management StrategyDocumento3 páginasPRINCE2 Quality Management StrategysreenathAún no hay calificaciones
- Is The Biochip The Mark of The BeastDocumento32 páginasIs The Biochip The Mark of The BeastAntu JohnAún no hay calificaciones
- Scan APIDocumento183 páginasScan APIChitradeep Dutta RoyAún no hay calificaciones
- WSDL Reading, A Beginner's GuideDocumento18 páginasWSDL Reading, A Beginner's GuidePVParameswaranAún no hay calificaciones
- Ap16 FRQ Chinese LanguageDocumento14 páginasAp16 FRQ Chinese LanguageSr. RZAún no hay calificaciones
- Hyperion EssbaseDocumento16 páginasHyperion Essbaseguru_rcpAún no hay calificaciones
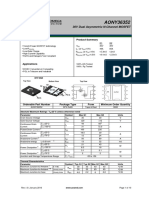
- AONY36352: 30V Dual Asymmetric N-Channel MOSFETDocumento10 páginasAONY36352: 30V Dual Asymmetric N-Channel MOSFETrobertjavi1983Aún no hay calificaciones
- Datatables Velzon - Admin Dashboard TemplateDocumento2 páginasDatatables Velzon - Admin Dashboard Templateganeshvittanala33Aún no hay calificaciones
- Rachel Freeman's ResumeDocumento3 páginasRachel Freeman's Resumerachel_freeman17Aún no hay calificaciones
- Internet-Of-Things (Iot) : Summer Engineering Program 2018 University of Notre DameDocumento42 páginasInternet-Of-Things (Iot) : Summer Engineering Program 2018 University of Notre DameMAFOQ UL HASSANAún no hay calificaciones
- SAS Part-1 SyllabusDocumento7 páginasSAS Part-1 Syllabusnagarjuna_upsc100% (1)
- Nddcet Model Qp-2 (100 Marks)Documento6 páginasNddcet Model Qp-2 (100 Marks)ABHIJIT NAIKAún no hay calificaciones
- Math Class 4 PaperDocumento2 páginasMath Class 4 PaperMudsarali KhushikAún no hay calificaciones
- Bridge PPTDocumento74 páginasBridge PPTKarthi ChowdaryAún no hay calificaciones
- PLS2 Instruction From W451Documento9 páginasPLS2 Instruction From W451Papahnya Qiana MaulinaAún no hay calificaciones
- Skype For Business Server 2015 - Kickoff PresentationDocumento15 páginasSkype For Business Server 2015 - Kickoff PresentationItw UttAún no hay calificaciones