También podría gustarte
- Kaedra - Mini Kaedra - 13979Documento2 páginasKaedra - Mini Kaedra - 13979Arturo de la HozAún no hay calificaciones
- MeggerDocumento55 páginasMeggerReynaldo MarcaAún no hay calificaciones
- 4 Formato Evaluacion de Plantas Electricas2Documento2 páginas4 Formato Evaluacion de Plantas Electricas2Arturo de la HozAún no hay calificaciones
- Plantas Electricas de EmergenciaDocumento101 páginasPlantas Electricas de EmergenciaArturo de la Hoz100% (1)
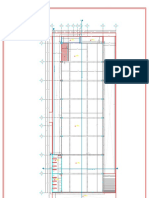
- Arquitectónico 2do Nivel Estado ActualDocumento1 páginaArquitectónico 2do Nivel Estado ActualArturo de la HozAún no hay calificaciones
- Descripción de Puestos ChepsaDocumento6 páginasDescripción de Puestos ChepsaArturo de la HozAún no hay calificaciones
- Tablero XXX: Detalles de circuitos y luminariasDocumento3 páginasTablero XXX: Detalles de circuitos y luminariasArturo de la HozAún no hay calificaciones
- Manual de Usuario - Operación Planta de EmergenciaDocumento27 páginasManual de Usuario - Operación Planta de EmergenciaMariaRocioZamoraAún no hay calificaciones
- Seco Bajatension PDFDocumento4 páginasSeco Bajatension PDFCesar Augusto Morales RomeroAún no hay calificaciones
- RE8080BBCBDocumento1 páginaRE8080BBCBArturo de la HozAún no hay calificaciones
- Proceso de Mantenimiento en Media TensiónDocumento2 páginasProceso de Mantenimiento en Media TensiónArturo de la HozAún no hay calificaciones
- Minuta de Observaciones en YaraDocumento2 páginasMinuta de Observaciones en YaraArturo de la HozAún no hay calificaciones
- Pruebas de Medición Al Sistema Puesto A TierraDocumento77 páginasPruebas de Medición Al Sistema Puesto A TierraArturo de la HozAún no hay calificaciones
- Checklist de Actividades .Documento7 páginasChecklist de Actividades .Arturo de la HozAún no hay calificaciones
- Accesorios Escalante - Punto TiburonDocumento1 páginaAccesorios Escalante - Punto TiburonArturo de la HozAún no hay calificaciones
- PROGRAMA DE EJECUCIÓN DE TRABAJOS JesusDocumento1 páginaPROGRAMA DE EJECUCIÓN DE TRABAJOS JesusArturo de la HozAún no hay calificaciones
- Formatos Planta ElectricaDocumento5 páginasFormatos Planta Electricaedibar2675% (12)
- Proceso de Mantenimiento en Media TensiónDocumento2 páginasProceso de Mantenimiento en Media TensiónArturo de la HozAún no hay calificaciones
- Mantenimiento de Planta de EmergenciaDocumento8 páginasMantenimiento de Planta de EmergenciaArturo de la Hoz100% (1)
- Proceso de Mantenimiento en Media TensiónDocumento2 páginasProceso de Mantenimiento en Media TensiónArturo de la HozAún no hay calificaciones
- Programa de ejecución de trabajos eléctricos de mantenimientoDocumento1 páginaPrograma de ejecución de trabajos eléctricos de mantenimientoArturo de la HozAún no hay calificaciones
- Golpe de ArieteDocumento5 páginasGolpe de ArieteArturo de la HozAún no hay calificaciones
- Centro Nacional de MetrologíaDocumento3 páginasCentro Nacional de MetrologíaArturo de la HozAún no hay calificaciones
- 2.3 Banco de CapacitoresDocumento19 páginas2.3 Banco de CapacitoresLuis Fernando Mena Hernández100% (4)
- Manual Shaft 200Documento93 páginasManual Shaft 200Israel RiquelmeAún no hay calificaciones
- Ejercicio 5 Excel AvanzadoDocumento225 páginasEjercicio 5 Excel AvanzadoBereAún no hay calificaciones
- Manual Laboratorio Cableado EstructuradoDocumento45 páginasManual Laboratorio Cableado EstructuradoManuel DelgadoAún no hay calificaciones
- Lista Maestra de Documentos: Sistema de Gestion de CalidadDocumento13 páginasLista Maestra de Documentos: Sistema de Gestion de CalidadJuan Derly Choque SonccoAún no hay calificaciones
- Descriptivo Encuesta de SatisfaccionDocumento8 páginasDescriptivo Encuesta de SatisfaccionAdriianiitha BautiisthaAún no hay calificaciones
- Practica 5Documento10 páginasPractica 5Lenin Pardo SalazarAún no hay calificaciones
- Memoria Tecnica DycDocumento17 páginasMemoria Tecnica Dycomar_ie7Aún no hay calificaciones
- A11.Taller - TablasVerdad - CRISTIAN VELASCODocumento2 páginasA11.Taller - TablasVerdad - CRISTIAN VELASCOCristian alejandro VelascoAún no hay calificaciones
- Practica de Fundamentos de Sistemas Operativos y TIDocumento3 páginasPractica de Fundamentos de Sistemas Operativos y TIJulio Bonilla100% (1)
- 04 - Comunicación FDLDocumento21 páginas04 - Comunicación FDLwaldo65Aún no hay calificaciones
- 1461 05057 C Sistemas Contro Interno V1Documento68 páginas1461 05057 C Sistemas Contro Interno V1MartinezRamirez0% (1)
- Precentacion 330C MLEDocumento134 páginasPrecentacion 330C MLEvanyAún no hay calificaciones
- Factura electrónica Mobil EXTRADocumento1 páginaFactura electrónica Mobil EXTRAKARLA BUENROSTROAún no hay calificaciones
- Potenciacion y Radicacion de Numeros Racionales para Primero de SecundariaDocumento11 páginasPotenciacion y Radicacion de Numeros Racionales para Primero de SecundariaDiaz LuisAún no hay calificaciones
- Agricultura de Precisión y LoRaWAN 1Documento137 páginasAgricultura de Precisión y LoRaWAN 1I THINK WE'RE DOOMEDAún no hay calificaciones
- Acta de Comite de Obra - San Agustin - ChaquiraDocumento4 páginasActa de Comite de Obra - San Agustin - ChaquiraKAREN ROJASAún no hay calificaciones
- Ejercicios - Método Hungaro de AsignaciónDocumento2 páginasEjercicios - Método Hungaro de AsignaciónTati_98Aún no hay calificaciones
- Recomendaciones de Las Consultas Sql-IdatDocumento3 páginasRecomendaciones de Las Consultas Sql-IdatMariel RodriguezAún no hay calificaciones
- Catalogo Precios ETP III - Nacional 2023-06-09Documento83 páginasCatalogo Precios ETP III - Nacional 2023-06-09Hector RodriguezAún no hay calificaciones
- Mapa de Procesos Costruccion FosoDocumento3 páginasMapa de Procesos Costruccion FosoRoberto Henriquez AriasAún no hay calificaciones
- Sistema de Numeracion BinarioDocumento34 páginasSistema de Numeracion BinarioLuis PecciAún no hay calificaciones
- Parte II-Configuracion de Cursos en El Aula Virtual Moodle - Aula XXIDocumento10 páginasParte II-Configuracion de Cursos en El Aula Virtual Moodle - Aula XXIAna-Goretti GarciaAún no hay calificaciones
- Esquemático de Comunicaciones - Proyecto PIASA - S.E. ITV CFE (PC)Documento7 páginasEsquemático de Comunicaciones - Proyecto PIASA - S.E. ITV CFE (PC)Ulises HernandezAún no hay calificaciones
- Historia de Los Sistemas ContablesDocumento4 páginasHistoria de Los Sistemas ContablesAnna Alfaro ZavalaAún no hay calificaciones
- US PLUS General BeneficiosDocumento45 páginasUS PLUS General BeneficiosWilson Yesid Perez Castañeda50% (2)
- Denwa PBX CaracterísticasDocumento83 páginasDenwa PBX CaracterísticasGraham ParejaaAún no hay calificaciones
- Consentimiento Informado de Teleconsultas - Telesalud MINSA - INENDocumento2 páginasConsentimiento Informado de Teleconsultas - Telesalud MINSA - INENMartín Fernández Rivera75% (4)
- POESDocumento4 páginasPOESMarrieli Danitza Espinoza CalizayaAún no hay calificaciones
- Ejercicios Algebra RelacionalDocumento3 páginasEjercicios Algebra RelacionalLuis Jaramillo UdayAún no hay calificaciones