También podría gustarte
- Datasheet IR2113Documento1 páginaDatasheet IR2113SebasXRAún no hay calificaciones
- 1-49 Random Number GeneratorDocumento1 página1-49 Random Number GeneratorRaúlAún no hay calificaciones
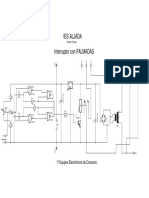
- Inte Palmadas 21Documento1 páginaInte Palmadas 21JaimeAún no hay calificaciones
- Motor 002Documento10 páginasMotor 002luis albertoAún no hay calificaciones
- Contador0 20-435Documento2 páginasContador0 20-435Leo EscobarAún no hay calificaciones
- Schematic Diagrama Conexion Electrico 2022-07-12Documento1 páginaSchematic Diagrama Conexion Electrico 2022-07-12Alexander IturraldeAún no hay calificaciones
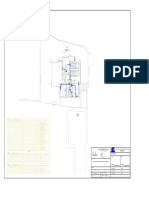
- Instalación eléctrica centrales eléctricas NariñoDocumento1 páginaInstalación eléctrica centrales eléctricas Nariñopablo arturo guerrero lopezAún no hay calificaciones
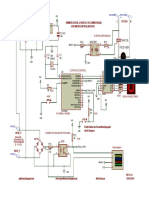
- Programador Microcontrolador JK3Documento1 páginaProgramador Microcontrolador JK3fast copiesAún no hay calificaciones
- Examen p1 Des Avan 2017 IIDocumento2 páginasExamen p1 Des Avan 2017 IIRuben E. Quispe DiazAún no hay calificaciones
- Prelaboratorio 7Documento3 páginasPrelaboratorio 7Ricardo TorresAún no hay calificaciones
- Practica 7Documento9 páginasPractica 7Ricardo TorresAún no hay calificaciones
- Procedimiento de CódigoDocumento2 páginasProcedimiento de CódigoJESUS EDUARDO MEZA MENDIVILAún no hay calificaciones
- Practica 4 MicroprocesadoresDocumento7 páginasPractica 4 MicroprocesadoresGodFatherGFAún no hay calificaciones
- Dimmer Digital Con Microcontrolador PIC PDFDocumento1 páginaDimmer Digital Con Microcontrolador PIC PDFEdwin Llico FustamanteAún no hay calificaciones
- Dimmer Digital Con Microcontrolador PIC PDFDocumento1 páginaDimmer Digital Con Microcontrolador PIC PDFEdwin Llico FustamanteAún no hay calificaciones
- Control Por Cable de 5 Funciones Con El TX 2B y RX 2BDocumento4 páginasControl Por Cable de 5 Funciones Con El TX 2B y RX 2BYariko ChieAún no hay calificaciones
- Placa T Con LG PintadoDocumento2 páginasPlaca T Con LG PintadojampcarlosAún no hay calificaciones
- Comparador de 8 BitsDocumento1 páginaComparador de 8 BitsaudioserviciosAún no hay calificaciones
- lab2Documento6 páginaslab2LEONARDO ZENON VELASQUEZ MEJIAAún no hay calificaciones
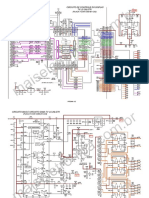
- T Con LG 26LG7 PDFDocumento2 páginasT Con LG 26LG7 PDFJose Barroso GuerraAún no hay calificaciones
- UntitledDocumento13 páginasUntitledjuan manAún no hay calificaciones
- Proyecto Final PDFDocumento19 páginasProyecto Final PDFHarold F. LaraAún no hay calificaciones
- Tarjeta E-SDocumento3 páginasTarjeta E-SJEANCARY POLANCOAún no hay calificaciones
- Practica5 PDFDocumento1 páginaPractica5 PDFvictor estradaAún no hay calificaciones
- Curso Básico ArduinoDocumento41 páginasCurso Básico ArduinoKriizthiian Addriian Rdz100% (1)
- L5 - Contadores y RegistrosDocumento12 páginasL5 - Contadores y RegistrosMayli FaustinoAún no hay calificaciones
- Display 7seg CC con controlador 4511Documento12 páginasDisplay 7seg CC con controlador 4511David ChuraAún no hay calificaciones
- EsquemaDocumento2 páginasEsquemanelsonAún no hay calificaciones
- Práctica 4 - PWMDocumento2 páginasPráctica 4 - PWMCarlos Garduño RAún no hay calificaciones
- Informe Final 7Documento8 páginasInforme Final 7Will LudeñaaAún no hay calificaciones
- Informe AluDocumento8 páginasInforme AluHave VilaAún no hay calificaciones
- Diagrama de Lazo FinalDocumento1 páginaDiagrama de Lazo FinalededyedwinAún no hay calificaciones
- Diagramas de Control Variador Acs350Documento1 páginaDiagramas de Control Variador Acs350Deyvi Moises Gonzales AmableAún no hay calificaciones
- CS-533E, CP-533E Vibratory Compactor BZG00001-UP (MACHINE) POWERED BY 3054C Engine (KEBP0271 - 55) - Por Palabra ClaveDocumento3 páginasCS-533E, CP-533E Vibratory Compactor BZG00001-UP (MACHINE) POWERED BY 3054C Engine (KEBP0271 - 55) - Por Palabra ClaveJonhAún no hay calificaciones
- Vista ExplosionadaDocumento1 páginaVista ExplosionadaAnass AnassAún no hay calificaciones
- 7基带&RFDocumento28 páginas7基带&RFwilsonjose4444Aún no hay calificaciones
- Diagramas EléctricosDocumento32 páginasDiagramas Eléctricostheking199999Aún no hay calificaciones
- Schematic Nrf24l01+pa+lnaDocumento2 páginasSchematic Nrf24l01+pa+lnaPierDonneeAún no hay calificaciones
- Ecualizador de 5 BandasDocumento1 páginaEcualizador de 5 Bandasponi02Aún no hay calificaciones
- Preparatorio 6Documento7 páginasPreparatorio 6Rodrigo LojanAún no hay calificaciones
- Guía de Laboratorio de EE243Documento14 páginasGuía de Laboratorio de EE243Antonio DLCAún no hay calificaciones
- Aplicaciones Avanzadas Con PicDocumento26 páginasAplicaciones Avanzadas Con Piccesar huamanAún no hay calificaciones
- TEMA - 19 Interrupcion Por Cambio de Nivel Enl RB4 - RB7 PDFDocumento20 páginasTEMA - 19 Interrupcion Por Cambio de Nivel Enl RB4 - RB7 PDFSneider AlvarezAún no hay calificaciones
- TPR3005TDocumento1 páginaTPR3005TDANIEL ALBERTO PEÑALVER100% (1)
- 3P Practica1 Electronica IIDocumento7 páginas3P Practica1 Electronica IIHéctor Medrano FloresAún no hay calificaciones
- Proteus Practica 2 AscensorDocumento1 páginaProteus Practica 2 AscensorGregorio Caballero RosalesAún no hay calificaciones
- Reporte RCF 7RM2 Prog 10Documento10 páginasReporte RCF 7RM2 Prog 10igmarAún no hay calificaciones
- Diagrama Medidor de NivelDocumento1 páginaDiagrama Medidor de NivelManuel ColinAún no hay calificaciones
- Tarjeta ExamenDocumento36 páginasTarjeta ExamenlmalúAún no hay calificaciones
- PLLDocumento6 páginasPLLart_ag7Aún no hay calificaciones
- lab4Documento4 páginaslab4LEONARDO ZENON VELASQUEZ MEJIAAún no hay calificaciones
- Ejercicios Resueltes Flip-FlopDocumento3 páginasEjercicios Resueltes Flip-FlopFredy Andres Torres NavaAún no hay calificaciones
- Módulo TEST para Circuitos Integrados TX 2B RX 2B JackDocumento4 páginasMódulo TEST para Circuitos Integrados TX 2B RX 2B JackYariko ChieAún no hay calificaciones
- PACT - OPTIMUM - ELECT - ESP - E02.08 84 PagDocumento2 páginasPACT - OPTIMUM - ELECT - ESP - E02.08 84 PagWillAún no hay calificaciones
- L5 - Contadores y RegistrosDocumento12 páginasL5 - Contadores y RegistrosHida Luz Gutierrez HuayhuaAún no hay calificaciones
- Microcontroladores examen finalDocumento2 páginasMicrocontroladores examen finalPol Ardiles Morales0% (2)
- Gradiente K-341Documento14 páginasGradiente K-341jampcarlosAún no hay calificaciones
- TB Agropecuaria y Bachillerato 1-2023 Módulo 0Documento1 páginaTB Agropecuaria y Bachillerato 1-2023 Módulo 0Wilmer DsAún no hay calificaciones
- Alimentación recién nacidoDocumento4 páginasAlimentación recién nacidoWilmer DsAún no hay calificaciones
- ComunicadoDocumento1 páginaComunicadoWilmer DsAún no hay calificaciones
- Tema Ciencias Sociales 22-04-2021Documento2 páginasTema Ciencias Sociales 22-04-2021Wilmer DsAún no hay calificaciones
- Cuándo y Cómo Lavarse Las ManosDocumento2 páginasCuándo y Cómo Lavarse Las ManosWilmer DsAún no hay calificaciones
- Bolivia 29-7-2021Documento2 páginasBolivia 29-7-2021Wilmer DsAún no hay calificaciones
- 3 EVAL III 2DO TRI 2do ADocumento4 páginas3 EVAL III 2DO TRI 2do AWilmer DsAún no hay calificaciones
- Tema Sistema Circulatorio 11-3Documento3 páginasTema Sistema Circulatorio 11-3Wilmer DsAún no hay calificaciones
- 6 Autoevaluacion JULIAN APAZADocumento1 página6 Autoevaluacion JULIAN APAZAWilmer DsAún no hay calificaciones
- Capturas de Pantalla de Las HerramientasDocumento5 páginasCapturas de Pantalla de Las HerramientasWilmer DsAún no hay calificaciones
- Tema de La Carpeta de MatemáticaDocumento1 páginaTema de La Carpeta de MatemáticaWilmer DsAún no hay calificaciones
- Tema 2 LEGUAJE 3 DE MARZODocumento2 páginasTema 2 LEGUAJE 3 DE MARZOWilmer DsAún no hay calificaciones
- Formato Plan Accion Cronograma Proyecto NICSPDocumento7 páginasFormato Plan Accion Cronograma Proyecto NICSPDiego BrhAún no hay calificaciones
- Tipo de VallesDocumento2 páginasTipo de VallesWilmer DsAún no hay calificaciones
- División 9 de Marzo MateDocumento3 páginasDivisión 9 de Marzo MateWilmer DsAún no hay calificaciones
- Antecedentes de investigación sobre TIC en educaciónDocumento5 páginasAntecedentes de investigación sobre TIC en educaciónWilmer Ds100% (1)
- Cartilla 5to SocialesDocumento45 páginasCartilla 5to SocialesWilmer DsAún no hay calificaciones
- El Valor Nutritivo de La LecheDocumento6 páginasEl Valor Nutritivo de La LecheWilmer DsAún no hay calificaciones
- Antecedentes de investigación sobre TIC en educaciónDocumento5 páginasAntecedentes de investigación sobre TIC en educaciónWilmer Ds100% (1)
- Poco Se Va Popularizando e Incluso LaDocumento9 páginasPoco Se Va Popularizando e Incluso LaWilmer DsAún no hay calificaciones
- Macro Excel Gantt - Planificador de ProyectosDocumento1 páginaMacro Excel Gantt - Planificador de ProyectosWilmer DsAún no hay calificaciones
- Tipo de VallesDocumento2 páginasTipo de VallesWilmer DsAún no hay calificaciones
- Diagrama de GanttDocumento2 páginasDiagrama de GanttCARLOS KLEIN PARRA NAUCAAún no hay calificaciones
- Marco Teórico. Parte 4Documento98 páginasMarco Teórico. Parte 4Wilmer DsAún no hay calificaciones
- Carta GanttDocumento1 páginaCarta GanttGerardoAlfonsoLagosAún no hay calificaciones
- Circuitos Peçreinfoc5Documento6 páginasCircuitos Peçreinfoc5Wilmer DsAún no hay calificaciones
- PhiladelphiaDocumento8 páginasPhiladelphiaWilmer DsAún no hay calificaciones
- SEGURIDAD INDUSTRIAL Señalizacion IndustrialDocumento38 páginasSEGURIDAD INDUSTRIAL Señalizacion IndustrialWilmer DsAún no hay calificaciones
- 2plantas Electricas PDFDocumento46 páginas2plantas Electricas PDFandresAún no hay calificaciones