También podría gustarte
- Sistema de calidad de restaurantes de comida rápidaDocumento6 páginasSistema de calidad de restaurantes de comida rápidajuan pablo67% (3)
- Sistema de calidad de restaurantes de comida rápidaDocumento6 páginasSistema de calidad de restaurantes de comida rápidajuan pablo67% (3)
- S01Documento2 páginasS01Efra IbacetaAún no hay calificaciones
- Análisis y diseño de circuitos eléctricos: Teoría y prácticaDe EverandAnálisis y diseño de circuitos eléctricos: Teoría y prácticaAún no hay calificaciones
- CARTA X-R Formato PDFDocumento1 páginaCARTA X-R Formato PDFFranco SosaAún no hay calificaciones
- P9 MSS Aguilar Ramirez Erick Martes 16 15Documento6 páginasP9 MSS Aguilar Ramirez Erick Martes 16 15erick aguilar100% (1)
- Taller 3Documento16 páginasTaller 3alvaro rojasAún no hay calificaciones
- APLICACIONES - VibracionesDocumento15 páginasAPLICACIONES - VibracionesM.A. SantistebanAún no hay calificaciones
- Resumen Electrónica Aplicada I PDFDocumento71 páginasResumen Electrónica Aplicada I PDFMatias LopezAún no hay calificaciones
- Practica 2Documento10 páginasPractica 2Luis 66995Aún no hay calificaciones
- Laboratorio 3 Corte ElectricidadDocumento3 páginasLaboratorio 3 Corte ElectricidadAndres Fabian Urrea0% (1)
- Subestaciones de DistribuciónDocumento27 páginasSubestaciones de DistribuciónRA GilmerAún no hay calificaciones
- Diseño de carrito de carga con transmisión por engranajes cilíndricos helicoidalesDocumento2 páginasDiseño de carrito de carga con transmisión por engranajes cilíndricos helicoidalesWilo WillowAún no hay calificaciones
- Análisis aerodinámico de 11 aviones comercialesDocumento4 páginasAnálisis aerodinámico de 11 aviones comercialesJulitamayo 89Aún no hay calificaciones
- Coloquio 5 - EstáticaDocumento13 páginasColoquio 5 - EstáticaRamiro Sebastian Galeano CarranoAún no hay calificaciones
- U3 ML202 4. - Problemas de Motores de InducciónDocumento38 páginasU3 ML202 4. - Problemas de Motores de InducciónJOSe LUIS OBREGoN AGUILARAún no hay calificaciones
- Laboratorio No.3 (Leyes de Kirchhoff)Documento14 páginasLaboratorio No.3 (Leyes de Kirchhoff)Angel VásquezAún no hay calificaciones
- Polarización Transistores Emisor ComúnDocumento3 páginasPolarización Transistores Emisor ComúnCristian ParraAún no hay calificaciones
- TRABAJO-FINAL - Tecnica de Diseño-De-EjesDocumento11 páginasTRABAJO-FINAL - Tecnica de Diseño-De-EjesWillian LaguaAún no hay calificaciones
- Practica No 6 Motor MonocilindricoDocumento8 páginasPractica No 6 Motor MonocilindricoIván Naula GarcíaAún no hay calificaciones
- Lab 1 Mecanismo INTRODUCCIONDocumento7 páginasLab 1 Mecanismo INTRODUCCIONGabo RocketPower MorenoAún no hay calificaciones
- Operaciones para EngranajesDocumento20 páginasOperaciones para EngranajesJeyson Chacon CastilloAún no hay calificaciones
- Informe Tornillo de PotenciaDocumento9 páginasInforme Tornillo de Potenciadiego vargasAún no hay calificaciones
- Múltiplos Del SDocumento4 páginasMúltiplos Del SOscar Montes FernándezAún no hay calificaciones
- Alternador-40Documento4 páginasAlternador-40Flor Yalle PichonAún no hay calificaciones
- 10bcs-Mecanismos Tema2 4 PDFDocumento38 páginas10bcs-Mecanismos Tema2 4 PDFVerónicaMhAún no hay calificaciones
- Investigacion 1 Dinamica AplicadaDocumento4 páginasInvestigacion 1 Dinamica Aplicadajorge gomezAún no hay calificaciones
- Límite de Resistencia A La FatigaDocumento2 páginasLímite de Resistencia A La FatigaJorge Carlos Otiniano AlcaldeAún no hay calificaciones
- Modelo Matematico Gobierno de BuquesDocumento7 páginasModelo Matematico Gobierno de BuquesPAUL ROY CABAÑA JAÑAAún no hay calificaciones
- Tarea 1 RoboticaDocumento5 páginasTarea 1 RoboticaCarlos Bernal MartínezAún no hay calificaciones
- Proyecto Final Dinamica de MaquinariaDocumento9 páginasProyecto Final Dinamica de MaquinariaRussell AgamaAún no hay calificaciones
- Pendulo SimpleDocumento9 páginasPendulo Simpleanon_745852220Aún no hay calificaciones
- Optimización de Un Resorte Helicoidal.Documento5 páginasOptimización de Un Resorte Helicoidal.Jairo Andres GuaquetaAún no hay calificaciones
- Biela ManivelaDocumento10 páginasBiela ManivelaDoris YujraAún no hay calificaciones
- Amplificadores de PotenciaDocumento8 páginasAmplificadores de PotenciaVíctor EucedaAún no hay calificaciones
- 2 PDFDocumento16 páginas2 PDFDeyvis Toribio AlbertoAún no hay calificaciones
- Solución - Examen Parcial MC 516 - 2022 - 01Documento10 páginasSolución - Examen Parcial MC 516 - 2022 - 01Remy B, Tanta CcosccoAún no hay calificaciones
- Universidad Nacional de IngenieríaDocumento21 páginasUniversidad Nacional de IngenieríaPaul CarcasiAún no hay calificaciones
- Mecanismo para Alinear Placas Apiladas2jhkjikDocumento4 páginasMecanismo para Alinear Placas Apiladas2jhkjikjuan david padillaAún no hay calificaciones
- Practica 1 Diodos y Transistores - Gonzalez Romero JulioDocumento6 páginasPractica 1 Diodos y Transistores - Gonzalez Romero JulioJulio Romero100% (1)
- Cálculo parámetros motor constante torque Ke RaDocumento2 páginasCálculo parámetros motor constante torque Ke RajhoderAún no hay calificaciones
- Taller Elementosdemaquinas ViejoDocumento3 páginasTaller Elementosdemaquinas ViejoisabellaAún no hay calificaciones
- Experimento 33Documento5 páginasExperimento 33Leo SalgadoAún no hay calificaciones
- Formulario Primer Parcial 2021Documento1 páginaFormulario Primer Parcial 2021Ulises Jhilmar Pacheco ChoqueAún no hay calificaciones
- CINEMÁTICA de LA PARTÍCULA - Mov Angular de Un Segmento RectilíneoDocumento8 páginasCINEMÁTICA de LA PARTÍCULA - Mov Angular de Un Segmento RectilíneoJavier MejiaAún no hay calificaciones
- Cálculo de esfuerzo cortante en elementos sometidos a pruebaDocumento12 páginasCálculo de esfuerzo cortante en elementos sometidos a pruebaDavid LeonAún no hay calificaciones
- Proyecto Redes de Aire 3.0Documento13 páginasProyecto Redes de Aire 3.0callidemierdaAún no hay calificaciones
- Analisis de Torsion en Transmision de PoDocumento36 páginasAnalisis de Torsion en Transmision de Poguido chavezAún no hay calificaciones
- Tablas de CojinetesDocumento37 páginasTablas de Cojinetesnj19Aún no hay calificaciones
- Shift RegisterDocumento7 páginasShift RegistermartaisabAún no hay calificaciones
- Lab 1 Pruebas y Fallas en Instrumentos-211-1Documento17 páginasLab 1 Pruebas y Fallas en Instrumentos-211-1Catalina BejaranoAún no hay calificaciones
- Laboratorio de Deformacion Por AbsorcionDocumento18 páginasLaboratorio de Deformacion Por AbsorcionFernando GuiraudAún no hay calificaciones
- Puente HDocumento11 páginasPuente HEdwin LSAún no hay calificaciones
- Apunte Jerry Parcial 3Documento19 páginasApunte Jerry Parcial 3Nicolas CamargoAún no hay calificaciones
- Conocimientos Que Se Emplean en La IngenieriaDocumento9 páginasConocimientos Que Se Emplean en La IngenieriaMaria BastidasAún no hay calificaciones
- Tolerancias en El Diseño MecánicoDocumento19 páginasTolerancias en El Diseño MecánicoJosé María Gallizo CastilloAún no hay calificaciones
- Circuito en ParaleloDocumento4 páginasCircuito en ParaleloKaren Yisell Melo VictoriaAún no hay calificaciones
- Cojinestes y Rodamiendtos EjerciciosDocumento26 páginasCojinestes y Rodamiendtos Ejerciciosarturroo leopnel castañettaAún no hay calificaciones
- LABORATORIO TraccionDocumento10 páginasLABORATORIO TraccionRoly Fernando Guarachi MuñozAún no hay calificaciones
- Introduccion AlgorDocumento27 páginasIntroduccion AlgorRonny CárdenasAún no hay calificaciones
- Taller N4 Capitulo 15 Grupo 4Documento8 páginasTaller N4 Capitulo 15 Grupo 4miguel cordobaAún no hay calificaciones
- El SupernuevoDocumento16 páginasEl SupernuevoYelidi CaballeroAún no hay calificaciones
- UF1253 - Diagnóstico de deformaciones estructuralesDe EverandUF1253 - Diagnóstico de deformaciones estructuralesAún no hay calificaciones
- Eficiencia energética en las instalaciones de calefacción y acs en los edificios. ENAC0108De EverandEficiencia energética en las instalaciones de calefacción y acs en los edificios. ENAC0108Aún no hay calificaciones
- PFC Alvaro Romero Gandul RevisadoDocumento122 páginasPFC Alvaro Romero Gandul RevisadoFranco SosaAún no hay calificaciones
- Modelo Dinamico Con Modos Flexibles: Satelite Con Paneles Solares SimétricosDocumento6 páginasModelo Dinamico Con Modos Flexibles: Satelite Con Paneles Solares SimétricosFranco SosaAún no hay calificaciones
- Amplificadores Darlington, Cascodo y DiferencialDocumento12 páginasAmplificadores Darlington, Cascodo y DiferencialRoberto Rocca JuárezAún no hay calificaciones
- IndexDocumento2 páginasIndexFranco SosaAún no hay calificaciones
- Bolilla 3 - Documentos SGCDocumento30 páginasBolilla 3 - Documentos SGCFranco SosaAún no hay calificaciones
- Bolilla 7 - Auditorías de CalidadDocumento12 páginasBolilla 7 - Auditorías de CalidadFranco SosaAún no hay calificaciones
- Lay OutDocumento1 páginaLay OutFranco SosaAún no hay calificaciones
- Bolilla 2 - ProcesosDocumento11 páginasBolilla 2 - ProcesosFranco SosaAún no hay calificaciones
- Aritmetica BinariaDocumento41 páginasAritmetica BinariaJason ButlerAún no hay calificaciones
- Public ViewDocumento3 páginasPublic ViewFranco SosaAún no hay calificaciones
- TP5 SdeC2018Documento2 páginasTP5 SdeC2018Franco SosaAún no hay calificaciones
- 5-Analisis y Diseño en FrecuenciaDocumento28 páginas5-Analisis y Diseño en FrecuenciaFranco SosaAún no hay calificaciones
- Rectas de Carga Dinamica y EstaticaDocumento6 páginasRectas de Carga Dinamica y EstaticaOscar SotoAún no hay calificaciones
- Practico N 4 Dinamica - ResueltoDocumento11 páginasPractico N 4 Dinamica - ResueltoFranco Sosa100% (1)
- Aritmetica BinariaDocumento41 páginasAritmetica BinariaJason ButlerAún no hay calificaciones
- RendimientoDocumento8 páginasRendimientoVictor Talaverano OchicuaAún no hay calificaciones
- Termodinamica Garcia - 10 de Garcia ProblemasDocumento79 páginasTermodinamica Garcia - 10 de Garcia ProblemasÁlvaro MuñozAún no hay calificaciones
- Circuitos de Segundo Orden RLCDocumento21 páginasCircuitos de Segundo Orden RLCFrancisco Javier Vera TorresAún no hay calificaciones
- Termodinámica - Enrico FermiDocumento80 páginasTermodinámica - Enrico FermiAlan Rios Fukelman100% (3)
- Termodinamica Garcia - 10 de Garcia ProblemasDocumento79 páginasTermodinamica Garcia - 10 de Garcia ProblemasÁlvaro MuñozAún no hay calificaciones
- Superficies CuadricasDocumento9 páginasSuperficies CuadricasRicardo Vides100% (3)
- Teoria y Practica de Resistencia de Materiales - VigasDocumento119 páginasTeoria y Practica de Resistencia de Materiales - VigasOswardMorenoAún no hay calificaciones
- Electrótecnia - Ramón M. Mujal Rosas PDFDocumento312 páginasElectrótecnia - Ramón M. Mujal Rosas PDFcarvalle5Aún no hay calificaciones
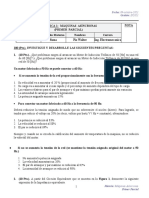
- Practica 1 (1er Parcial)Documento15 páginasPractica 1 (1er Parcial)PIO WALTER100% (1)
- ACTIVIDAD 3 Taller Practico Unidades y Patrones de MedidaDocumento9 páginasACTIVIDAD 3 Taller Practico Unidades y Patrones de MedidadayanaAún no hay calificaciones
- 1 Clave Calculos Altimetricos y BarometricoDocumento70 páginas1 Clave Calculos Altimetricos y BarometricoCristian MoralesAún no hay calificaciones
- Tema 7 - Física Del Siglo XXDocumento32 páginasTema 7 - Física Del Siglo XXIciar Moreno LopezAún no hay calificaciones
- Clemente Carbajal Trbajo 1Documento12 páginasClemente Carbajal Trbajo 1Cesar Clemente CarbajalAún no hay calificaciones
- Memoria Tecn. Descriptiva Casa Grande Modificada 2Documento8 páginasMemoria Tecn. Descriptiva Casa Grande Modificada 2Cristian CZAún no hay calificaciones
- Control de Par de Un Motor EléctricoDocumento211 páginasControl de Par de Un Motor EléctricoEduardo MuñetonAún no hay calificaciones
- Circuitos resonantes: tipos y frecuencia resonanteDocumento2 páginasCircuitos resonantes: tipos y frecuencia resonantealdahir109Aún no hay calificaciones
- Evaluacion Formativa Unidad 4 CuartoDocumento4 páginasEvaluacion Formativa Unidad 4 CuartoEdith Ximena Gonzalez NaveasAún no hay calificaciones
- R 3Documento22 páginasR 3Kate KateAún no hay calificaciones
- Curso Instalaciones Electricas P1Documento39 páginasCurso Instalaciones Electricas P1Yamil Miler Mironés PlataAún no hay calificaciones
- Hoja de Matar PozoDocumento2 páginasHoja de Matar PozoCamilo Méndez100% (3)
- Laboratorio 2 - Transformador MonofasicoDocumento9 páginasLaboratorio 2 - Transformador MonofasicoOrlando CaizaAún no hay calificaciones
- Demonio de MaxwellDocumento3 páginasDemonio de MaxwellCecilio Díaz GijónAún no hay calificaciones
- Centro de GravedadDocumento15 páginasCentro de GravedadRS SebasAún no hay calificaciones
- Estabilidad permanente y oscilaciones no amortiguadas en el sistema eléctrico peruanoDocumento57 páginasEstabilidad permanente y oscilaciones no amortiguadas en el sistema eléctrico peruanoXavier DortaAún no hay calificaciones
- SP-SSOMA-PO - 007 Trabajos ElectricosDocumento8 páginasSP-SSOMA-PO - 007 Trabajos ElectricosLeoncio Mejía MejíaAún no hay calificaciones
- Introducción A La Estática - UCV 2022 IIDocumento28 páginasIntroducción A La Estática - UCV 2022 IISAMUEL EDUARDO MOGOLLON GIRONAún no hay calificaciones
- Trabajo de TransistoresDocumento35 páginasTrabajo de TransistoresAlejandro GilAún no hay calificaciones
- Simbolos Din Ansi IecDocumento10 páginasSimbolos Din Ansi IecJesús Estévez100% (2)
- Flujo de Campo Eléctrico y Ley de GaussDocumento8 páginasFlujo de Campo Eléctrico y Ley de Gaussworez17Aún no hay calificaciones
- Midiendo masa y volumenDocumento5 páginasMidiendo masa y volumenGisela Yolanda Ramirez Perez100% (1)
- Instrumentacion Electronica Caracterizacion Experimental de Filtros de Primer OrdenerDocumento13 páginasInstrumentacion Electronica Caracterizacion Experimental de Filtros de Primer OrdenerRaul Castillo RojasAún no hay calificaciones
- Unidad I Comunicación de DatosDocumento307 páginasUnidad I Comunicación de DatosAlex ReyesAún no hay calificaciones
- Prueba GDocumento1 páginaPrueba GMiguell Gomez100% (1)
- Informe de Laboratorio2324Documento8 páginasInforme de Laboratorio2324Jhoel QuispeAún no hay calificaciones
- FISICA I - Reactivos Del Bloque 4Documento2 páginasFISICA I - Reactivos Del Bloque 4Otrebor RaplAún no hay calificaciones
- Informe Final de Laboratorio #1Documento21 páginasInforme Final de Laboratorio #1Elizabeth EscalanteAún no hay calificaciones