También podría gustarte
- Elementos Multipuertos - Hector Martin Cortes CamposDocumento5 páginasElementos Multipuertos - Hector Martin Cortes CamposHéctor Martín Cortés CamposAún no hay calificaciones
- Clase9 - Introduccion A Trabajo y Energía-1Documento18 páginasClase9 - Introduccion A Trabajo y Energía-1Paloma AzarmendiaAún no hay calificaciones
- S13.s2 - Energía Del M.A.SDocumento18 páginasS13.s2 - Energía Del M.A.SJotacheq NacionalAún no hay calificaciones
- Introducción Al Modelado de Sistemas FísicosDocumento3 páginasIntroducción Al Modelado de Sistemas FísicosYusei PeregrinoAún no hay calificaciones
- Circuitos CA Fasores ImpedanciaDocumento3 páginasCircuitos CA Fasores ImpedanciaJonathan AlonsoAún no hay calificaciones
- 00 - JOSELGC - Corrección Del Factor de Potencia 2Documento10 páginas00 - JOSELGC - Corrección Del Factor de Potencia 2Luis GonzálezAún no hay calificaciones
- Movimiento OscilatorioDocumento13 páginasMovimiento OscilatorioRodrigo Monroy GutierrezAún no hay calificaciones
- Relacion Entre El Momento de Una Fuerza y La Cantidad de Movimiento AngularDocumento6 páginasRelacion Entre El Momento de Una Fuerza y La Cantidad de Movimiento AngularjeiserAún no hay calificaciones
- Relacion Entre El Momento de Una Fuerza y La Cantidad de Movimiento AngularDocumento6 páginasRelacion Entre El Momento de Una Fuerza y La Cantidad de Movimiento Angularjeiser0% (1)
- Capítulo 8 - Luna Salas MisaelDocumento6 páginasCapítulo 8 - Luna Salas MisaelJUAN PABLO DELGADILLO GOCHEAún no hay calificaciones
- Ensayos Física IDocumento24 páginasEnsayos Física IJesus GolonAún no hay calificaciones
- Unidad 11 Movimiento OscilatorioDocumento8 páginasUnidad 11 Movimiento OscilatorioUriel MoyanoAún no hay calificaciones
- Actividad 9. Once. Fisica. Jhonatan ArroyaveDocumento7 páginasActividad 9. Once. Fisica. Jhonatan ArroyaveJulian Orozco SotoAún no hay calificaciones
- ESTATICADocumento17 páginasESTATICAKari NaoAún no hay calificaciones
- NTU1FÍSICAIVT4B2IMEDocumento7 páginasNTU1FÍSICAIVT4B2IMEPEDROAún no hay calificaciones
- Objetivo 1.6 Funcion de TransferenciaDocumento32 páginasObjetivo 1.6 Funcion de Transferencialuisloa979Aún no hay calificaciones
- Sistemas Resorte Masa Movimiento Libre No AmortiguadoDocumento15 páginasSistemas Resorte Masa Movimiento Libre No AmortiguadoDesmond.PAún no hay calificaciones
- ANÁLISIS DE CIRCUITOS ELÉCTRICOS I ING Apaza PROCESO NOCHEDocumento58 páginasANÁLISIS DE CIRCUITOS ELÉCTRICOS I ING Apaza PROCESO NOCHEYulner Angel Huaman AriasAún no hay calificaciones
- Practica 3 de LabDocumento9 páginasPractica 3 de LabMauricio Obando CuevaAún no hay calificaciones
- ANALOGIASDocumento10 páginasANALOGIASCarlos A. PérezAún no hay calificaciones
- T1 Momento RotacionalDocumento20 páginasT1 Momento RotacionalOscar Adrian Astorga AguilarAún no hay calificaciones
- U1G3Documento5 páginasU1G3marielbysfabiolaAún no hay calificaciones
- Tema 3Documento18 páginasTema 3PALOP23Aún no hay calificaciones
- Teorica III. Tema 2. Conservación Del Campo EMDocumento21 páginasTeorica III. Tema 2. Conservación Del Campo EMsam aya mamAún no hay calificaciones
- Dinamica U4 (Michelle Margarita Garcia Torres)Documento8 páginasDinamica U4 (Michelle Margarita Garcia Torres)Michelle Margarita Garcia Torres100% (1)
- Aplicaciones A Circuitos ElectricosDocumento16 páginasAplicaciones A Circuitos Electricosjhonatan diazAún no hay calificaciones
- Flujo sobre un cilindro: superposición de un flujo uniforme y un dobleteDocumento8 páginasFlujo sobre un cilindro: superposición de un flujo uniforme y un dobleteJoel LazoAún no hay calificaciones
- Tema 4 Corriente EléctricaDocumento14 páginasTema 4 Corriente EléctricaRuben ZubillagaAún no hay calificaciones
- Sistemas MecanicosDocumento12 páginasSistemas Mecanicosely100% (2)
- NTU1FÍSICAIVT4B2IMEDocumento7 páginasNTU1FÍSICAIVT4B2IMEdortz55Aún no hay calificaciones
- Parte A Módulo I Puntos 3 y 4-Problema ResueltoDocumento10 páginasParte A Módulo I Puntos 3 y 4-Problema Resueltoarmando4a4sanchez4sAún no hay calificaciones
- MAS. Péndulo SimpleDocumento16 páginasMAS. Péndulo SimpleLuis BonetAún no hay calificaciones
- 11 Sistema Cuerpo ResorteDocumento7 páginas11 Sistema Cuerpo ResorteYamile BerrocalAún no hay calificaciones
- Práctica Impacto de ChorroDocumento13 páginasPráctica Impacto de Chorroleila loveAún no hay calificaciones
- Laboratorio - Oscilaciones ForzadasDocumento2 páginasLaboratorio - Oscilaciones ForzadasNanfer PereaAún no hay calificaciones
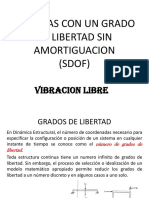
- Sistemas Con Un Grado de Libertad Sin AmortiguacionDocumento35 páginasSistemas Con Un Grado de Libertad Sin AmortiguacionGabriel Mendoza ArauzAún no hay calificaciones
- Cinética de Una PartículaDocumento3 páginasCinética de Una PartículaAaron MeraAún no hay calificaciones
- Ejercicios Resueltos Leyes Fundamentales PDFDocumento5 páginasEjercicios Resueltos Leyes Fundamentales PDFricardoAún no hay calificaciones
- Segunda Ley de Movimiento de NewtonDocumento15 páginasSegunda Ley de Movimiento de NewtonSthalin Carranza DiazAún no hay calificaciones
- ME0324 - Modelos de PotenciaDocumento15 páginasME0324 - Modelos de PotenciasergioAún no hay calificaciones
- 02 Energía y Trabajo 2021Documento26 páginas02 Energía y Trabajo 2021Luis Miguel MatolaAún no hay calificaciones
- G1 2 PDFDocumento4 páginasG1 2 PDFsaciAún no hay calificaciones
- 1.oscilaciones - Movimiento Armónico Simple PDFDocumento5 páginas1.oscilaciones - Movimiento Armónico Simple PDFVicente PaineAún no hay calificaciones
- Lab 6 Sanchez AlemDocumento13 páginasLab 6 Sanchez AlemAlem Sebastian Sanchez ChungaAún no hay calificaciones
- Giovanni Zamudio Zuñiga Reporte U4Documento7 páginasGiovanni Zamudio Zuñiga Reporte U4David ManzanoAún no hay calificaciones
- Mecanica Del HiloDocumento21 páginasMecanica Del Hilo1402018062Aún no hay calificaciones
- 2.1.1-Absorción - CorrelacionesDocumento3 páginas2.1.1-Absorción - CorrelacionesDaniel Becker GarcésAún no hay calificaciones
- Memorias CuánticaDocumento37 páginasMemorias CuánticaJuan David Escobar CruzAún no hay calificaciones
- DistribucionDocumento18 páginasDistribucionagccAún no hay calificaciones
- U4 Dinamica-Del-Sistema-De-ParticulasDocumento10 páginasU4 Dinamica-Del-Sistema-De-ParticulasMatias CatariAún no hay calificaciones
- Resumen de Trabajo y EnergiaDocumento8 páginasResumen de Trabajo y EnergiaAlam MartinezAún no hay calificaciones
- Exposicion DinamicaDocumento15 páginasExposicion DinamicaNiloAún no hay calificaciones
- Proyecto 2 de Ecuaciones DiferencialesDocumento16 páginasProyecto 2 de Ecuaciones DiferencialesKaritOo HuarachaAún no hay calificaciones
- Energía Del M.A.SDocumento18 páginasEnergía Del M.A.SRommel RiscoAún no hay calificaciones
- Fisica Del CarroDocumento2 páginasFisica Del CarroDiegoBarbosaAún no hay calificaciones
- Ecuaciones Diferenciales EJE 3 Carlos Alberto Villegas SanchezDocumento8 páginasEcuaciones Diferenciales EJE 3 Carlos Alberto Villegas SanchezCarlos VillegasAún no hay calificaciones
- Dirección y migración de contaminantesDocumento12 páginasDirección y migración de contaminantesGuillermo ReyesAún no hay calificaciones
- Determinación agua Karl Fischer 40ppmDocumento6 páginasDeterminación agua Karl Fischer 40ppmCarlos RomanAún no hay calificaciones
- Mecanica de Fluidos Trabajo de Superficies CurvasDocumento24 páginasMecanica de Fluidos Trabajo de Superficies CurvasMiguel Ángel Mejía BenitoAún no hay calificaciones
- Evaluacion de Herramientas para El Analisis de Estabilidad Fisica de Una Presa de Relaves EspesadosDocumento129 páginasEvaluacion de Herramientas para El Analisis de Estabilidad Fisica de Una Presa de Relaves EspesadosBrandon Nova AndlerAún no hay calificaciones
- Sub Cuenca Del Rio Guayabero Hasta Bocas Del Rio DudaDocumento64 páginasSub Cuenca Del Rio Guayabero Hasta Bocas Del Rio Dudalore padillaAún no hay calificaciones
- Deber Presion y Fluidos OkDocumento4 páginasDeber Presion y Fluidos OkQueli AleAún no hay calificaciones
- Formado de metales: procesos y comportamiento del materialDocumento39 páginasFormado de metales: procesos y comportamiento del materialAlexisAún no hay calificaciones
- Guía 6. Enlace QuímicoDocumento3 páginasGuía 6. Enlace QuímicoLuis JoséAún no hay calificaciones
- Seminario 2da LeyDocumento5 páginasSeminario 2da LeyJULIO HUMBERTO TIRADO VASQUEZAún no hay calificaciones
- Celulosa Circuito AproximaciónDocumento24 páginasCelulosa Circuito AproximaciónLuis Guerra Vega100% (1)
- Práctica No.8 ElectroquimicaDocumento6 páginasPráctica No.8 Electroquimicaharrison alonsoAún no hay calificaciones
- Estática, Leyes de Newton, Neutron, ModificadoDocumento8 páginasEstática, Leyes de Newton, Neutron, ModificadoSoloAventurasNadaMazAún no hay calificaciones
- I Unidad - Materiales y ProcesosDocumento49 páginasI Unidad - Materiales y ProcesosJhann Antoni Saldaña FernandezAún no hay calificaciones
- Estática IDocumento18 páginasEstática Iedwin gutierrezAún no hay calificaciones
- Ecuaciones de EstadoDocumento12 páginasEcuaciones de EstadoDavid IsraelAún no hay calificaciones
- LABORATORIO N 1 Cinetica Marcelo Cisternas ZamoraDocumento12 páginasLABORATORIO N 1 Cinetica Marcelo Cisternas ZamoraMarceloCisternasAún no hay calificaciones
- Calor-TransferenciaDocumento39 páginasCalor-TransferenciaSantiago Cardona ArroyaveAún no hay calificaciones
- Ondas Estacionarias - FisicaDocumento13 páginasOndas Estacionarias - FisicaNaomi Rendon AnchayhuaAún no hay calificaciones
- Laboratorio 1 - Módulo UltracongelaciónDocumento7 páginasLaboratorio 1 - Módulo UltracongelaciónGonzalo Vilca FigueroaAún no hay calificaciones
- Sistemas de tuberías y caudalesDocumento25 páginasSistemas de tuberías y caudalesCHILON ISPILCO ELIOAún no hay calificaciones
- Ejercicios 22-32 - 26-10-20Documento5 páginasEjercicios 22-32 - 26-10-20PedroAún no hay calificaciones
- Carpeta DinamicaDocumento16 páginasCarpeta DinamicaGraciela CanoAún no hay calificaciones
- Entrega Memoria de Calculo Apartamentos J.Hernandez 12 2 18Documento36 páginasEntrega Memoria de Calculo Apartamentos J.Hernandez 12 2 18Joseph MendozaAún no hay calificaciones
- Informe Masa-ResorteDocumento9 páginasInforme Masa-ResorteDIEGO ARLEY RODRIGUEZ MOYANOAún no hay calificaciones
- Normas AstmDocumento10 páginasNormas AstmRodolfo Delgado HancoAún no hay calificaciones
- Ensayos No Destructivos en SoldaduraDocumento3 páginasEnsayos No Destructivos en SoldadurahuicholeAún no hay calificaciones
- Hoja Mantenimiento CalefacciónDocumento1 páginaHoja Mantenimiento CalefacciónMiryan GcaAún no hay calificaciones
- Bateria Agm 12V 35ahDocumento1 páginaBateria Agm 12V 35ahChristian NavarroAún no hay calificaciones
- GUÍA No 6 - Naturaleza y Propagación de La LuzDocumento16 páginasGUÍA No 6 - Naturaleza y Propagación de La LuzEagles BaloncestoAún no hay calificaciones
- 1 Fibras Opticasu1Documento129 páginas1 Fibras Opticasu1fernando gonzalezAún no hay calificaciones