También podría gustarte
- Transformadores eléctricos: Cálculos de parámetros y ensayosDocumento2 páginasTransformadores eléctricos: Cálculos de parámetros y ensayoseveiroAún no hay calificaciones
- 1 PDFDocumento1 página1 PDFeveiroAún no hay calificaciones
- Calcular pernos para uniones estructuralesDocumento3 páginasCalcular pernos para uniones estructuraleseveiroAún no hay calificaciones
- ProyectoDocumento3 páginasProyectoeveiroAún no hay calificaciones
- TStudDocumento1 páginaTStudMariana Abigail Gomez LopezAún no hay calificaciones
- MecDocumento2 páginasMeceveiroAún no hay calificaciones
- 1 PDFDocumento1 página1 PDFeveiroAún no hay calificaciones
- Practica n1Documento1 páginaPractica n1eveiroAún no hay calificaciones
- ParcticaDocumento3 páginasParcticaeveiroAún no hay calificaciones
- Practica n1Documento1 páginaPractica n1eveiroAún no hay calificaciones
- Practica N 1 Hidra..... - 1Documento3 páginasPractica N 1 Hidra..... - 1eveiroAún no hay calificaciones
- Formulario de Turbinas Pelton y FrancisDocumento9 páginasFormulario de Turbinas Pelton y FrancisDavid HawkinsAún no hay calificaciones
- TStudDocumento1 páginaTStudeveiroAún no hay calificaciones
- Informe de Ventilador CentrifugoDocumento19 páginasInforme de Ventilador CentrifugoChristian TumiAún no hay calificaciones
- Motores AsincrónicosDocumento30 páginasMotores AsincrónicosFravier LeonAún no hay calificaciones
- Guia de Alimentos para La Población MexicanaDocumento70 páginasGuia de Alimentos para La Población MexicanaIrene Cruz58% (19)
- 2 PDFDocumento1 página2 PDFeveiroAún no hay calificaciones
- Informe Tecnico Valoracion CDocumento30 páginasInforme Tecnico Valoracion CeveiroAún no hay calificaciones
- Mil STD 414 Tabla b5Documento13 páginasMil STD 414 Tabla b5Roger Rodriguez EspinozaAún no hay calificaciones
- PRACTICA DIRIGIDA Medidas de Tendencia Central en ExcelDocumento29 páginasPRACTICA DIRIGIDA Medidas de Tendencia Central en Exceledidson fuentesAún no hay calificaciones
- TStudDocumento1 páginaTStudMariana Abigail Gomez LopezAún no hay calificaciones
- Medidas de Tendencia Central en Excel3Documento12 páginasMedidas de Tendencia Central en Excel3eveiroAún no hay calificaciones
- MEI 545 - Electricidad Industrial BásicaDocumento2 páginasMEI 545 - Electricidad Industrial BásicaProcaseAún no hay calificaciones
- DistribucionDocumento13 páginasDistribucioneveiroAún no hay calificaciones
- 2GUIAtc218 PDFDocumento4 páginas2GUIAtc218 PDFLC Ivan ErnestoAún no hay calificaciones
- Guia1 PDFDocumento10 páginasGuia1 PDFeveiroAún no hay calificaciones
- Datos 1-2019 Lab 5Documento6 páginasDatos 1-2019 Lab 5eveiroAún no hay calificaciones
- MEI 545 - Electricidad Industrial BásicaDocumento2 páginasMEI 545 - Electricidad Industrial BásicaProcaseAún no hay calificaciones
- 1 GUIAtc 118Documento3 páginas1 GUIAtc 118LC Ivan ErnestoAún no hay calificaciones
- Calculos Transfer Lab1Documento8 páginasCalculos Transfer Lab1eveiroAún no hay calificaciones
- INNOVO - Presentación ERP ComercialDocumento11 páginasINNOVO - Presentación ERP ComercialZOCO MARKETAún no hay calificaciones
- Ficha Resumen LecturaDocumento5 páginasFicha Resumen LecturaJohan Bismark VelasquezAún no hay calificaciones
- IndexDocumento80 páginasIndexpink makeupAún no hay calificaciones
- Gestion Del MantenimientoDocumento16 páginasGestion Del MantenimientoSebastian AlarconAún no hay calificaciones
- Simulación de procesos de venta en tienda Joshoa para optimizar tiempo de esperaDocumento60 páginasSimulación de procesos de venta en tienda Joshoa para optimizar tiempo de esperaKevin RonaldAún no hay calificaciones
- Anexo 4. Libro de Excel - Ficha Técnica de Indicadores-Tema 1Documento8 páginasAnexo 4. Libro de Excel - Ficha Técnica de Indicadores-Tema 1jhon harold urueña villadaAún no hay calificaciones
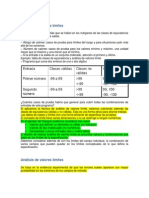
- Análisis de Valores LimitesDocumento4 páginasAnálisis de Valores LimitesannaleemontoyaAún no hay calificaciones
- Folleto Brochure de Servicios Empresa Profesional AmarilloDocumento2 páginasFolleto Brochure de Servicios Empresa Profesional AmarilloEpic GamesAún no hay calificaciones
- COBITDocumento13 páginasCOBITVictor Manuel PAún no hay calificaciones
- PCM Modulación Delta 40Documento11 páginasPCM Modulación Delta 40PGJ TUTORIALESAún no hay calificaciones
- Redes BayesianasDocumento10 páginasRedes BayesianaskennyAún no hay calificaciones
- Manual Collaborate para Estudiantes UGM AdvanceDocumento8 páginasManual Collaborate para Estudiantes UGM AdvanceMarcela AndreaAún no hay calificaciones
- Gestión de Múltiples DispositivosDocumento8 páginasGestión de Múltiples DispositivosAlvaro Mamani ChoqueAún no hay calificaciones
- Características de Un Equipo Scrum IdealDocumento4 páginasCaracterísticas de Un Equipo Scrum IdealroxanitabelAún no hay calificaciones
- ¿Cómo Funciona Un PC y Que Hace Cada Pieza?Documento9 páginas¿Cómo Funciona Un PC y Que Hace Cada Pieza?aldo mendezAún no hay calificaciones
- TC Gestión Transporte DistribuciónDocumento9 páginasTC Gestión Transporte Distribucióncristian alberto sabogal roa100% (1)
- Sistemas de Tierras Eléctricas: Métodos de MediciónDocumento15 páginasSistemas de Tierras Eléctricas: Métodos de MediciónJuan Ledesma MartinezAún no hay calificaciones
- Plan de Evaciacion BuenaventuraDocumento15 páginasPlan de Evaciacion BuenaventuraNatalia JaramilloAún no hay calificaciones
- Desbloquear El Gestor de ArranqueDocumento2 páginasDesbloquear El Gestor de ArranqueAngel TOAún no hay calificaciones
- Tarea 02/metrologia ElectricaDocumento20 páginasTarea 02/metrologia ElectricaAngel Flores GómezAún no hay calificaciones
- Practica 2. Martinez PadillaDocumento24 páginasPractica 2. Martinez PadillaMartinez Padilla José AntonioAún no hay calificaciones
- Act 3 Modelo Matematico en Hoja de Calculo 1895499 IMEDocumento7 páginasAct 3 Modelo Matematico en Hoja de Calculo 1895499 IMERubi GallegosAún no hay calificaciones
- Business Intelligence and AnalyticsDocumento7 páginasBusiness Intelligence and AnalyticsAlessandra Segovia LópezAún no hay calificaciones
- 1461 05057 C Sistemas Contro Interno V1Documento68 páginas1461 05057 C Sistemas Contro Interno V1MartinezRamirez0% (1)
- Manual Shaft 200Documento93 páginasManual Shaft 200Israel RiquelmeAún no hay calificaciones
- Co - Formulario de Solicitud para Levantar Autoexclusion 2023Documento1 páginaCo - Formulario de Solicitud para Levantar Autoexclusion 2023María José ValensAún no hay calificaciones
- 11 1 Caracteristicas y Funciones de Seguridad Del SMBDDocumento6 páginas11 1 Caracteristicas y Funciones de Seguridad Del SMBDArmando CasallasAún no hay calificaciones
- .Trashed 1688831870 CurpDocumento1 página.Trashed 1688831870 CurpDora Lares HerreraAún no hay calificaciones
- HP Jetdirect EX PlusDocumento64 páginasHP Jetdirect EX PlusJose JulianAún no hay calificaciones