También podría gustarte
- Criterio de RouthDocumento16 páginasCriterio de RouthCarlos Morales CarbajalAún no hay calificaciones
- Carcaterización Del LEDDocumento10 páginasCarcaterización Del LEDCarlos Morales CarbajalAún no hay calificaciones
- Calculo Inductancia ToroideDocumento4 páginasCalculo Inductancia ToroideCarlos Morales CarbajalAún no hay calificaciones
- SI2Documento59 páginasSI2Carlos Morales CarbajalAún no hay calificaciones
- Conversiones de MedidaDocumento12 páginasConversiones de MedidaCarlos Morales CarbajalAún no hay calificaciones
- Investigación PatronesDocumento4 páginasInvestigación PatronesCarlos Morales CarbajalAún no hay calificaciones
- Simulacion Sistema RCDocumento2 páginasSimulacion Sistema RCCarlos Morales CarbajalAún no hay calificaciones
- PE Termodinámica 2018Documento13 páginasPE Termodinámica 2018Carlos Morales CarbajalAún no hay calificaciones
- Ejercicios:: Control Digital Unidad IiDocumento3 páginasEjercicios:: Control Digital Unidad IiCarlos Morales CarbajalAún no hay calificaciones
- Elementos Referencias BibliograficasDocumento1 páginaElementos Referencias BibliograficasCarlos Morales CarbajalAún no hay calificaciones
- Galvanómetro Arsonval principios componentesDocumento7 páginasGalvanómetro Arsonval principios componentesCarlos Morales CarbajalAún no hay calificaciones
- Tarea Unidades Electricas, Ondas Periodicas, Frecuencia y FaseDocumento1 páginaTarea Unidades Electricas, Ondas Periodicas, Frecuencia y FaseCarlos Morales CarbajalAún no hay calificaciones
- Galvanómetro Arsonval principios componentesDocumento7 páginasGalvanómetro Arsonval principios componentesCarlos Morales CarbajalAún no hay calificaciones
- Control Difuso Parte 1Documento97 páginasControl Difuso Parte 1Carlos Morales CarbajalAún no hay calificaciones
- Pract-3 Ley de OhmDocumento9 páginasPract-3 Ley de OhmJOMOMUAún no hay calificaciones
- Puente WheastoneDocumento7 páginasPuente WheastoneManuel Santos BarradasAún no hay calificaciones
- Pract 8Documento5 páginasPract 8EnderAún no hay calificaciones
- Practica 7fweDocumento4 páginasPractica 7fweCarlos Morales CarbajalAún no hay calificaciones
- Curso de Metrología SUDocumento26 páginasCurso de Metrología SUCarlos Morales CarbajalAún no hay calificaciones
- Practica 4 - Dispositivos OptoelectronicosDocumento5 páginasPractica 4 - Dispositivos OptoelectronicosFly Jesus Yesca PrzAún no hay calificaciones
- Apunte 1Documento21 páginasApunte 1jord001100% (1)
- Laboratorio1 Mediciones ElectricasDocumento7 páginasLaboratorio1 Mediciones ElectricasMiguel Angel Zavala RiosAún no hay calificaciones
- Mediciones EléctricasDocumento9 páginasMediciones EléctricasCarlos Morales CarbajalAún no hay calificaciones
- Indice PDFDocumento7 páginasIndice PDFCarlos Morales CarbajalAún no hay calificaciones
- Fuerzas y momentos magnéticos en circuitos eléctricosDocumento8 páginasFuerzas y momentos magnéticos en circuitos eléctricosCarlos Morales CarbajalAún no hay calificaciones
- Practica 07Documento7 páginasPractica 07Carlos Morales CarbajalAún no hay calificaciones
- Conversiones de MedidaDocumento12 páginasConversiones de MedidaCarlos Morales CarbajalAún no hay calificaciones
- Laboratorio1 Mediciones ElectricasDocumento7 páginasLaboratorio1 Mediciones ElectricasMiguel Angel Zavala RiosAún no hay calificaciones
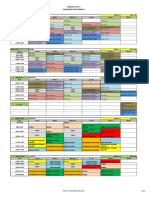
- Horarios Mecatronica 2017-3 31 de AgostoDocumento3 páginasHorarios Mecatronica 2017-3 31 de AgostoCarlos Morales CarbajalAún no hay calificaciones
- Ejercicios de Paralelismo A Nivel de InstrucciónDocumento10 páginasEjercicios de Paralelismo A Nivel de InstrucciónAngel Garcia XdAún no hay calificaciones
- Brazilfw en Vmware Con UbuntuDocumento38 páginasBrazilfw en Vmware Con Ubuntusharkgreen25Aún no hay calificaciones
- Apuntes de ProcesosDocumento9 páginasApuntes de ProcesosAngelus RamiezAún no hay calificaciones
- 5 EthernetDocumento59 páginas5 EthernetRous GarciaAún no hay calificaciones
- Hardware y SoftwareDocumento38 páginasHardware y SoftwareIE Carlos A. Piñerez CalaoAún no hay calificaciones
- Manual Del Usuario G16Documento15 páginasManual Del Usuario G16Erick F. Delpretti Z.Aún no hay calificaciones
- Comandos Sistemas OperativosDocumento8 páginasComandos Sistemas OperativosJordy MendozaAún no hay calificaciones
- Lab 02Documento17 páginasLab 02leonardo guzmanAún no hay calificaciones
- Instalar XAMPP en Una Memoria USBDocumento6 páginasInstalar XAMPP en Una Memoria USBleonav22Aún no hay calificaciones
- GFPI-F-135 - GUIA - 02 - Modelamiento Técnico UMLDocumento12 páginasGFPI-F-135 - GUIA - 02 - Modelamiento Técnico UMLVALENTINA ABRIL PAEZ PEAAún no hay calificaciones
- Trabajos14 Soft Switch Soft SwitchDocumento18 páginasTrabajos14 Soft Switch Soft SwitchauztingAún no hay calificaciones
- Interfaz Control Proyector Carl ZeissDocumento9 páginasInterfaz Control Proyector Carl ZeisstilixAún no hay calificaciones
- Origen y Evolucion Del ComputadorDocumento4 páginasOrigen y Evolucion Del Computadorcesarrbr100% (1)
- ForoDocumento2 páginasForoJefry MateusAún no hay calificaciones
- Instalar-Android-SDK-Eclipse-Guia-CompletaDocumento100 páginasInstalar-Android-SDK-Eclipse-Guia-CompletaKayo LouIs100% (1)
- Progav Tema3 PDFDocumento90 páginasProgav Tema3 PDFCarlos Tito CáceresAún no hay calificaciones
- Carrasco Alexa Tarea 3.2Documento4 páginasCarrasco Alexa Tarea 3.2Alexa CarrascoAún no hay calificaciones
- Preinforme 3Documento12 páginasPreinforme 3Wilmer OscoAún no hay calificaciones
- Lista de Precios BG-1Documento2 páginasLista de Precios BG-1Isac MartinezAún no hay calificaciones
- Investigación#2 ConvertidoresDocumento16 páginasInvestigación#2 ConvertidoresMauro SánchezAún no hay calificaciones
- Virus informáticosDocumento7 páginasVirus informáticosSilvia Rojas VargasAún no hay calificaciones
- Ont An5506 04 Fs ManualDocumento2 páginasOnt An5506 04 Fs ManualFRANZ JHOEL CORI ROJASAún no hay calificaciones
- Fuente de 5 Voltios Sin TransformadorDocumento5 páginasFuente de 5 Voltios Sin TransformadorTrafu LarAún no hay calificaciones
- Resumen y Mapa ConceptualDocumento7 páginasResumen y Mapa ConceptualCarlos Andres LaverdeAún no hay calificaciones
- Lab 2 PCDocumento6 páginasLab 2 PCJesus HuamaniAún no hay calificaciones
- Comandos de Seguimiento y Registro PACKET TRACERDocumento9 páginasComandos de Seguimiento y Registro PACKET TRACERdannyAún no hay calificaciones
- Formas de Computadoras ActualesDocumento6 páginasFormas de Computadoras ActualesYesenia Rogel VilchisAún no hay calificaciones
- Manual de UsuarioDocumento6 páginasManual de UsuarioVictor MendozaAún no hay calificaciones
- Practica 12 Holly CompereDocumento8 páginasPractica 12 Holly CompereHolly CompereAún no hay calificaciones
- Examen 1 Ccna 3 100%Documento7 páginasExamen 1 Ccna 3 100%José Luis Gabarrón SalazarAún no hay calificaciones