También podría gustarte
- MTC - Simulacro de Examen de ConocimientosDocumento2 páginasMTC - Simulacro de Examen de Conocimientosleonel80% (15)
- MTC - Simulacro de Examen de ConocimientosDocumento2 páginasMTC - Simulacro de Examen de Conocimientosleonel80% (15)
- Contrato de ArrendamientoDocumento5 páginasContrato de ArrendamientoCarlita Rojas Pérez100% (1)
- Práctica Resistencia y Potencia EléctricaDocumento2 páginasPráctica Resistencia y Potencia Eléctricaleonel0% (1)
- FisicaDocumento2 páginasFisicaleonelAún no hay calificaciones
- TrabajoDocumento19 páginasTrabajoleonelAún no hay calificaciones
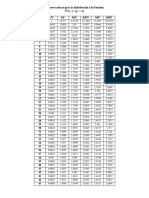
- Tabla de Distribucion T-StudentDocumento2 páginasTabla de Distribucion T-StudentleonelAún no hay calificaciones
- Practica N°10 ProesDocumento2 páginasPractica N°10 Proesleonel0% (1)
- Consolidado de Matrícula (Preliminar)Documento3 páginasConsolidado de Matrícula (Preliminar)leonelAún no hay calificaciones
- Resume NDocumento5 páginasResume NJordan Josue TorresAún no hay calificaciones
- Presentación DC2 02.06.22Documento32 páginasPresentación DC2 02.06.22Luiz TqAún no hay calificaciones
- Anexo Gramajes en PlanicifaciónDocumento2 páginasAnexo Gramajes en PlanicifacióncignaciabooksAún no hay calificaciones
- 3 - Introduccion Agentes Extintores - Seguridad IVDocumento18 páginas3 - Introduccion Agentes Extintores - Seguridad IVRafaelAún no hay calificaciones
- 11 Equipo S de Lab OratorioDocumento46 páginas11 Equipo S de Lab OratorioCarl ReyAún no hay calificaciones
- Taller Reflexivos 10° Ivp (2021)Documento2 páginasTaller Reflexivos 10° Ivp (2021)JanethMendietaMuñozAún no hay calificaciones
- BuffersDocumento13 páginasBufferscarolAún no hay calificaciones
- Por Una Tubería de 40 MM de Diámetro InteriorDocumento3 páginasPor Una Tubería de 40 MM de Diámetro InteriorDenisse Prisilla VillacaAún no hay calificaciones
- Trabajo Academico IDocumento20 páginasTrabajo Academico IismaelnoecruzAún no hay calificaciones
- Perfil de La Empresa Agrícola La DantaDocumento7 páginasPerfil de La Empresa Agrícola La DantalianapochetAún no hay calificaciones
- El PáncreasDocumento10 páginasEl PáncreasFernando PerezAún no hay calificaciones
- La Industria Del HierroDocumento11 páginasLa Industria Del Hierroandrik SarmientoAún no hay calificaciones
- ¿Que Es El RITO de KULADocumento3 páginas¿Que Es El RITO de KULAEDITH ROMERO HERNANDEZAún no hay calificaciones
- 3uso de Tablas de InterésDocumento11 páginas3uso de Tablas de InterésDani Martínez Avitia0% (1)
- Grupo N°10 PDFDocumento9 páginasGrupo N°10 PDFfresiaAún no hay calificaciones
- 89188937-Wiring Diagram FM PDFDocumento88 páginas89188937-Wiring Diagram FM PDFcarlos100% (4)
- Articulo de Nutrición BovinaDocumento15 páginasArticulo de Nutrición BovinaGabriela Roa100% (1)
- Tarea Modulo4. Gerencia FinancieraDocumento4 páginasTarea Modulo4. Gerencia FinancieraigrisAún no hay calificaciones
- HSL 3Documento6 páginasHSL 3JesusAún no hay calificaciones
- Medidas de Bio SeguridadDocumento47 páginasMedidas de Bio SeguridadAlejandra IntriagoAún no hay calificaciones
- Semiologia de Torax Brito r4Documento60 páginasSemiologia de Torax Brito r4Mikaury Brito0% (2)
- El Control Del Ciclo CelularDocumento2 páginasEl Control Del Ciclo Celularmaria paulaAún no hay calificaciones
- 007 Evaluación Estructural Parte1Documento33 páginas007 Evaluación Estructural Parte1José Ponce FiliosAún no hay calificaciones
- Actividad 1 Paula MedinaDocumento5 páginasActividad 1 Paula MedinaPaula Andrea Medina SierraAún no hay calificaciones
- 10 Datos Curiosos e Interesantes de VenezuelaDocumento9 páginas10 Datos Curiosos e Interesantes de VenezuelaNel y FifiAún no hay calificaciones
- Transporte MultimodalDocumento39 páginasTransporte MultimodalJoshua WebbAún no hay calificaciones
- Problema 1Documento12 páginasProblema 1Karina Salazar NuñezAún no hay calificaciones
- Cot. Prod. Quím. P. Caldero.... 24.04.17Documento6 páginasCot. Prod. Quím. P. Caldero.... 24.04.17jaime obando sandivalAún no hay calificaciones
- Constante Mi para Distintos Tipos de Roca IntactaDocumento16 páginasConstante Mi para Distintos Tipos de Roca IntactaLeslie IvettAún no hay calificaciones