También podría gustarte
- 2016 Informe 20FDocumento341 páginas2016 Informe 20FManuel MendezAún no hay calificaciones
- Sistemas de Proteccion Catodica-Pemex-2002Documento44 páginasSistemas de Proteccion Catodica-Pemex-2002dio_arias2219100% (1)
- Certificado 00140 VPT Producto 2019Documento2 páginasCertificado 00140 VPT Producto 2019ingeline sasAún no hay calificaciones
- FDS Cemento Cemex ColombiaDocumento12 páginasFDS Cemento Cemex ColombiaJESSICAAún no hay calificaciones
- 14-Apéndice C (Planos)Documento15 páginas14-Apéndice C (Planos)jams1359Aún no hay calificaciones
- Tiristorizados T-R PDFDocumento2 páginasTiristorizados T-R PDFjams1359Aún no hay calificaciones
- Teoria Planificacion y Control de ProyectosDocumento17 páginasTeoria Planificacion y Control de Proyectoslaya 1985Aún no hay calificaciones
- ¿Capitalismo Y Libertad en Latinoamérica?Documento14 páginas¿Capitalismo Y Libertad en Latinoamérica?Fernando RojasAún no hay calificaciones
- Tesis Control de CostosDocumento115 páginasTesis Control de CostosMiguel Oscar Rodriguez OvalleAún no hay calificaciones
- CatodicaDocumento82 páginasCatodicaOrlando Bravo SalazarAún no hay calificaciones
- Informe Del Comisario Mercantil de PDVSA Ano 2015 PDFDocumento112 páginasInforme Del Comisario Mercantil de PDVSA Ano 2015 PDFChristian HernandezAún no hay calificaciones
- 14-Apéndice CDocumento0 páginas14-Apéndice CEdilia LecunaAún no hay calificaciones
- GGPC - Guia de Gerencia de Proyectos de ConstruccionDocumento194 páginasGGPC - Guia de Gerencia de Proyectos de Construccionabraham_agm83Aún no hay calificaciones
- LCT Catalogo 2015 Terminales y HerramientasDocumento90 páginasLCT Catalogo 2015 Terminales y HerramientasNadia olivo100% (1)
- Articulo PC Tanques Enterrados ChileDocumento8 páginasArticulo PC Tanques Enterrados ChileCoco GalindoAún no hay calificaciones
- Protección catódica con ánodos galvánicosDocumento38 páginasProtección catódica con ánodos galvánicosEdgar Mauricio Aguilar UmbarilaAún no hay calificaciones
- Motor Calc 2Documento1 páginaMotor Calc 2jams1359Aún no hay calificaciones
- 01-CAPITULO I (Canalizaciones Electricas)Documento1 página01-CAPITULO I (Canalizaciones Electricas)jams1359Aún no hay calificaciones
- 01 Capitulo IDocumento6 páginas01 Capitulo IJosé Guillermo LópezAún no hay calificaciones
- Control de MotorDocumento4 páginasControl de MotorabbigaelAún no hay calificaciones
- Protección Catódica Tesis PDFDocumento101 páginasProtección Catódica Tesis PDFfranciscoelcapoAún no hay calificaciones
- 02 Capitulo IIDocumento0 páginas02 Capitulo IIEdilia LecunaAún no hay calificaciones
- Solución Numérica de La Ecuación de Oscilación Implementación, EjemploDocumento3 páginasSolución Numérica de La Ecuación de Oscilación Implementación, EjemploDanielAlejandroRamosQueroAún no hay calificaciones
- Libro - Calculo de Lineas y RedesDocumento41 páginasLibro - Calculo de Lineas y Redesjams1359100% (1)
- Instalacion Electrica VistaDocumento20 páginasInstalacion Electrica Vistajams1359Aún no hay calificaciones
- Tabla de Consumo de EnergiaDocumento1 páginaTabla de Consumo de Energiajams1359Aún no hay calificaciones
- 18 Instalacion Electrica VistaDocumento0 páginas18 Instalacion Electrica VistaEduardo ZaynosAún no hay calificaciones
- Tanquilla 80 x100 x100 Tapa AceroDocumento1 páginaTanquilla 80 x100 x100 Tapa Acerojams1359Aún no hay calificaciones
- Tabla de Consumo de EnergiaDocumento1 páginaTabla de Consumo de Energiajams1359Aún no hay calificaciones
- Ensayo Energia NuclearDocumento3 páginasEnsayo Energia NuclearJ Alejandro Robalino0% (1)
- EnzimasDocumento22 páginasEnzimasMARIA PAOLA QUINTANA SISAAún no hay calificaciones
- EsfaleritaDocumento3 páginasEsfaleritaHERIBERTO1244Aún no hay calificaciones
- Costo HorarioDocumento30 páginasCosto HorariodavidcdsAún no hay calificaciones
- Instalaciones de agua en edificios: captación, almacenamiento y distribuciónDocumento42 páginasInstalaciones de agua en edificios: captación, almacenamiento y distribuciónLuis Enrique Cieza100% (1)
- Análisis estadístico del peso de cobre en bobinados de máquinas eléctricasDocumento7 páginasAnálisis estadístico del peso de cobre en bobinados de máquinas eléctricasMVMAún no hay calificaciones
- Sexto Materia - TransformacionesDocumento7 páginasSexto Materia - TransformacionesMauricio Alejandro Riquelme AguirreAún no hay calificaciones
- Trabajo Colaborativo Fisica III - Entrega 3Documento9 páginasTrabajo Colaborativo Fisica III - Entrega 3AlexAún no hay calificaciones
- Funciones Del NeumáticoDocumento6 páginasFunciones Del NeumáticogianmarcoAún no hay calificaciones
- Aprovechamientos Hidroeléctricos - Centrales Reversibles - Pequeñas Centrales 2019Documento89 páginasAprovechamientos Hidroeléctricos - Centrales Reversibles - Pequeñas Centrales 2019Agos BritosAún no hay calificaciones
- Folleto 920-921 2015 MXDocumento12 páginasFolleto 920-921 2015 MXVíctor Hugo SCAún no hay calificaciones
- Temporizadores (Al Energizar y Al DesenergizarDocumento9 páginasTemporizadores (Al Energizar y Al DesenergizarbidimencionalAún no hay calificaciones
- EnsayoDocumento6 páginasEnsayoMARIBEL SANTIAGO MORGANAún no hay calificaciones
- Precios de Alquiler de Maquinarias - TransmaquinaDocumento14 páginasPrecios de Alquiler de Maquinarias - TransmaquinamiriamAún no hay calificaciones
- Manejo de la compactadora de neumáticos Dynapac CP 132Documento25 páginasManejo de la compactadora de neumáticos Dynapac CP 132ReneViilataDiazAún no hay calificaciones
- Deepwater HorizonDocumento2 páginasDeepwater HorizonJosé Armando Méndez RíosAún no hay calificaciones
- Fase 5 Riesgos AmbientalesDocumento9 páginasFase 5 Riesgos Ambientalespedro suarezAún no hay calificaciones
- Contaminación AtmosféricaDocumento20 páginasContaminación Atmosféricamarcos hernandezAún no hay calificaciones
- Apuntes Andres Rubio EspinosaDocumento13 páginasApuntes Andres Rubio EspinosaAlex Baylon CruzAún no hay calificaciones
- 830E AC OperacionDocumento204 páginas830E AC OperacionEmmanuel Cervantes Mandamiento75% (4)
- Conceptos básicos de química orgánica: nomenclatura, reactividad y mecanismos de sustituciónDocumento17 páginasConceptos básicos de química orgánica: nomenclatura, reactividad y mecanismos de sustituciónsefeAún no hay calificaciones
- Documento de Postura Oficial - República de La Unión de MyanmarDocumento2 páginasDocumento de Postura Oficial - República de La Unión de MyanmarBruno Gamarra QuintoAún no hay calificaciones
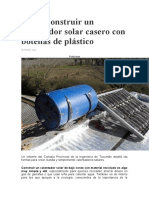
- Cómo Construir Un Calentador Solar Casero Con Botellas de PlásticoDocumento5 páginasCómo Construir Un Calentador Solar Casero Con Botellas de PlásticoPompeyo Bellido VilchezAún no hay calificaciones
- Energia HidraulicaDocumento69 páginasEnergia HidraulicaMarina Ferradas0% (1)
- Equipos de Alimentación AuxiliarDocumento13 páginasEquipos de Alimentación AuxiliarVictor Will MendozaAún no hay calificaciones
- 2.13 Rotulado de Interruptores, Aisladores, Enchufes y ValvulasDocumento6 páginas2.13 Rotulado de Interruptores, Aisladores, Enchufes y ValvulasAlfredo Zambra Alarcón Alias MorroAún no hay calificaciones
- Distribuidor Principal de Tecnología OrtronicDocumento21 páginasDistribuidor Principal de Tecnología OrtronicdonsacaAún no hay calificaciones
- Infografía Fuentes de EnergíaDocumento1 páginaInfografía Fuentes de EnergíaJoseAún no hay calificaciones
- Fuerza MagnéticaDocumento6 páginasFuerza MagnéticaKarla Carrasco M.Aún no hay calificaciones