También podría gustarte
- Formatos de MantenimeintoDocumento18 páginasFormatos de MantenimeintoJosé Luis ErazoAún no hay calificaciones
- Carta de RecomendacionDocumento1 páginaCarta de RecomendacionJosé Luis Erazo100% (1)
- Tesis 1revDocumento93 páginasTesis 1revJosé Luis ErazoAún no hay calificaciones
- Sersa Ec Portafolio 1Documento11 páginasSersa Ec Portafolio 1José Luis ErazoAún no hay calificaciones
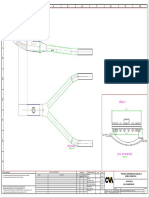
- Bifurcador Ensamble15!04!2021Documento1 páginaBifurcador Ensamble15!04!2021José Luis ErazoAún no hay calificaciones
- MemoriaDocumento3 páginasMemoriaJosé Luis ErazoAún no hay calificaciones
- Elasticidad 2D - 2020BDocumento57 páginasElasticidad 2D - 2020BJosé Luis ErazoAún no hay calificaciones
- EPN Técnico Docente MotivaciónDocumento1 páginaEPN Técnico Docente MotivaciónJosé Luis ErazoAún no hay calificaciones
- Proyecto Final Grupo1Documento11 páginasProyecto Final Grupo1José Luis ErazoAún no hay calificaciones
- Vigas - 2020BDocumento40 páginasVigas - 2020BJosé Luis ErazoAún no hay calificaciones
- PRUEBADocumento1 páginaPRUEBAJosé Luis ErazoAún no hay calificaciones
- Vigas - 2020BDocumento40 páginasVigas - 2020BJosé Luis ErazoAún no hay calificaciones
- Tensores acero inoxidable fabricaciónDocumento30 páginasTensores acero inoxidable fabricaciónJosé Luis ErazoAún no hay calificaciones
- Anexo 2 - Formulario para Salidas Al ExteriorDocumento3 páginasAnexo 2 - Formulario para Salidas Al ExteriorJosé Luis ErazoAún no hay calificaciones
- Especificaciones Alta6Documento3 páginasEspecificaciones Alta6José Luis ErazoAún no hay calificaciones
- Presentación PaezDocumento27 páginasPresentación PaezJosé Luis ErazoAún no hay calificaciones
- Metalurgia de Polvos PDFDocumento55 páginasMetalurgia de Polvos PDFJosé Luis ErazoAún no hay calificaciones
- ABS plástico propiedades tablaDocumento1 páginaABS plástico propiedades tablaCarlos LealAún no hay calificaciones
- LibroDocumento1 páginaLibroJosé Luis ErazoAún no hay calificaciones
- Ciudad Generosa, Ciudad Del FuturoDocumento1 páginaCiudad Generosa, Ciudad Del FuturoJosé Luis ErazoAún no hay calificaciones
- Diseño de Un Equipo de Desinfección Por Luz Ultravioleta para El Tratamiento de Aguas Residuales Con Fines de ReutilizaciónDocumento2 páginasDiseño de Un Equipo de Desinfección Por Luz Ultravioleta para El Tratamiento de Aguas Residuales Con Fines de ReutilizaciónJosé Luis ErazoAún no hay calificaciones
- CorrosionDocumento95 páginasCorrosionLuis HMAún no hay calificaciones
- Fresa DoraDocumento4 páginasFresa DoraJosé Luis ErazoAún no hay calificaciones
- Dinamica de SistemasDocumento2 páginasDinamica de SistemasJosé Luis ErazoAún no hay calificaciones
- Proyectos ConjuntosDocumento1 páginaProyectos ConjuntosJosé Luis ErazoAún no hay calificaciones
- Deber Ejer CengelDocumento7 páginasDeber Ejer CengelJosé Luis ErazoAún no hay calificaciones
- Obsolescencia ProgrmadaDocumento1 páginaObsolescencia ProgrmadaJosé Luis ErazoAún no hay calificaciones
- Ciudad Generosa, Ciudad Del FuturoDocumento1 páginaCiudad Generosa, Ciudad Del FuturoJosé Luis ErazoAún no hay calificaciones