También podría gustarte
- High Sensitivity Counting Techniques: International Series of Monographs on Electronics and InstrumentationDe EverandHigh Sensitivity Counting Techniques: International Series of Monographs on Electronics and InstrumentationAún no hay calificaciones
- Reliably detects low level radar signals with reduced false alarmsDocumento5 páginasReliably detects low level radar signals with reduced false alarmsDaniela ScobarAún no hay calificaciones
- US6196497Documento12 páginasUS6196497wdr4322350Aún no hay calificaciones
- Patent Us4636796Documento61 páginasPatent Us4636796jesusAún no hay calificaciones
- United States Patent (10) Patent No.: US 6,512,720 B1: Yang (45) Date of Patent: Jan. 28, 2003Documento16 páginasUnited States Patent (10) Patent No.: US 6,512,720 B1: Yang (45) Date of Patent: Jan. 28, 2003Pierre LeconAún no hay calificaciones
- United States Patent (19) : / InputDocumento8 páginasUnited States Patent (19) : / InputvikasAún no hay calificaciones
- Drilling Rig Mud Flow Measurement SystemDocumento16 páginasDrilling Rig Mud Flow Measurement SystemshadyghanemAún no hay calificaciones
- Mxer - : United States PatentDocumento11 páginasMxer - : United States PatentGhulam MehdiAún no hay calificaciones
- United States Patent (19) 11 Patent Number: 5,759,102: Dommun-LdommuniDocumento8 páginasUnited States Patent (19) 11 Patent Number: 5,759,102: Dommun-LdommuniAshish BhardwajAún no hay calificaciones
- Speakerphone Test Set for Telephone Line TechniciansDocumento7 páginasSpeakerphone Test Set for Telephone Line Technicianshernandez.josedomingo6804Aún no hay calificaciones
- Aircraft Rudder Boost System Proportional to Manual ForceDocumento5 páginasAircraft Rudder Boost System Proportional to Manual Forceviswanathan SAún no hay calificaciones
- 5. Получение высокочистого WF6 пропусканием газа над WDocumento6 páginas5. Получение высокочистого WF6 пропусканием газа над WIvan AndrianovAún no hay calificaciones
- Guided Wave Radar Level Transmitter DesignDocumento16 páginasGuided Wave Radar Level Transmitter DesignEdda Andrade RosalesAún no hay calificaciones
- Patent Us4107692Documento11 páginasPatent Us4107692jesusAún no hay calificaciones
- United States Patent (10) Patent No.: US 6,867,729 B2: Berry Et Al. (45) Date of Patent: Mar. 15, 2005Documento15 páginasUnited States Patent (10) Patent No.: US 6,867,729 B2: Berry Et Al. (45) Date of Patent: Mar. 15, 2005Edda Andrade RosalesAún no hay calificaciones
- Aerodnamic Exterior Ballistic k310Documento40 páginasAerodnamic Exterior Ballistic k310badarAún no hay calificaciones
- GRS Is: (12) United States Patent (10) Patent No.: US 6,285,139 B1Documento9 páginasGRS Is: (12) United States Patent (10) Patent No.: US 6,285,139 B1Alex KattamisAún no hay calificaciones
- Us 4573002Documento13 páginasUs 4573002S. L.Aún no hay calificaciones
- Us 4458356Documento8 páginasUs 4458356Kenny Rey GuillenAún no hay calificaciones
- TRANSMISSION INERTIA BRAKE WITHDocumento10 páginasTRANSMISSION INERTIA BRAKE WITHolduren53Aún no hay calificaciones
- US National Aviation Standard for NDB/ADF SystemDocumento22 páginasUS National Aviation Standard for NDB/ADF SystemnimeshAún no hay calificaciones
- United States Patent (19) : Q K Rf/Audio 8-36 MHZ AmDocumento5 páginasUnited States Patent (19) : Q K Rf/Audio 8-36 MHZ Amjohn ramseyAún no hay calificaciones
- United States Patent (10) Patent No.: US 6,324,393 B1: Doshay (45) Date of Patent: Nov. 27, 2001Documento5 páginasUnited States Patent (10) Patent No.: US 6,324,393 B1: Doshay (45) Date of Patent: Nov. 27, 2001Kalai KalaiAún no hay calificaciones
- Laser Warning Reciever Part-1Documento9 páginasLaser Warning Reciever Part-1Paras KanwarAún no hay calificaciones
- Aerodynamic Characteristics of .22LR Match AmmunitionDocumento76 páginasAerodynamic Characteristics of .22LR Match Ammunitionwlou100% (3)
- United States Patent (19Documento12 páginasUnited States Patent (19Chetan DadhaniyaAún no hay calificaciones
- Us6529169 PDFDocumento8 páginasUs6529169 PDFFRANK NIELE DE OLIVEIRAAún no hay calificaciones
- United States Patent (19) : Kumagai Et AlDocumento17 páginasUnited States Patent (19) : Kumagai Et AlVishal TAún no hay calificaciones
- Project EagleDocumento282 páginasProject EagleDan KaszetaAún no hay calificaciones
- Bale Opener Surface Inclination Sensor ControlDocumento10 páginasBale Opener Surface Inclination Sensor Controlgizex2013Aún no hay calificaciones
- 122 EpirbDocumento1 página122 EpirbthỏaAún no hay calificaciones
- A Test Method For Measuring Corona Inception VoltageDocumento39 páginasA Test Method For Measuring Corona Inception VoltageRamzanAún no hay calificaciones
- IIII: United States Patent (19) 11 Patent Number: 5,513,519Documento12 páginasIIII: United States Patent (19) 11 Patent Number: 5,513,519Somplak KudaAún no hay calificaciones
- 122 EpirbDocumento1 página122 EpirbthỏaAún no hay calificaciones
- US5103233Documento78 páginasUS5103233shubhamAún no hay calificaciones
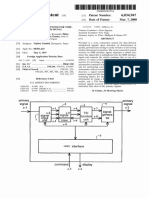
- United States Patent (19) : 11 Patent Number: 6,011,991 (45) Date of Patent: Jan. 4, 2000Documento10 páginasUnited States Patent (19) : 11 Patent Number: 6,011,991 (45) Date of Patent: Jan. 4, 2000Budo Gold CoastAún no hay calificaciones
- US6089502Documento17 páginasUS6089502////Aún no hay calificaciones
- SEO-optimized title for US patent on microprocessor interrupt processingDocumento28 páginasSEO-optimized title for US patent on microprocessor interrupt processingElectronical_DudeAún no hay calificaciones
- US6087796 Vel+fluxDocumento16 páginasUS6087796 Vel+fluxsebastianAún no hay calificaciones
- US4544892Documento7 páginasUS4544892pepe argentoAún no hay calificaciones
- 406 Satellite Test: Ofship: CallsignDocumento2 páginas406 Satellite Test: Ofship: CallsignHoàng VũAún no hay calificaciones
- Bridge LayoutDocumento1 páginaBridge Layoutaditya suryanAún no hay calificaciones
- Protect Program-Controlled Equipment from Frequent InterruptsDocumento7 páginasProtect Program-Controlled Equipment from Frequent Interruptsjohnmaxin1114Aún no hay calificaciones
- US5515029Documento15 páginasUS5515029Carlos OrtegaAún no hay calificaciones
- United States Patent: Y Reflected BeamDocumento5 páginasUnited States Patent: Y Reflected Beammohamed hemdanAún no hay calificaciones
- Us3229232 Vestigal Sdeband Moulaton System 1962Documento4 páginasUs3229232 Vestigal Sdeband Moulaton System 1962Wasif AzimAún no hay calificaciones
- United States Patent: Example)Documento19 páginasUnited States Patent: Example)Hira SinghAún no hay calificaciones
- US4668941Documento7 páginasUS4668941Carlos OrtegaAún no hay calificaciones
- Monitor Movement Device Alerts When Person Leaves AreaDocumento12 páginasMonitor Movement Device Alerts When Person Leaves AreaMelin Yohana SitioAún no hay calificaciones
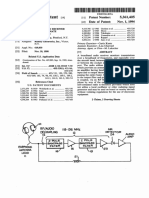
- United States Patent (19) : 11) Patent Number: 4,864,547 (45) Date of Patent: Sep. 5, 1989Documento18 páginasUnited States Patent (19) : 11) Patent Number: 4,864,547 (45) Date of Patent: Sep. 5, 1989mohasAún no hay calificaciones
- Modeling Underwater ExplosionsDocumento26 páginasModeling Underwater ExplosionsRoy DeavenportAún no hay calificaciones
- Carrier Frequency Offset Estimation for OFDM SignalsDocumento14 páginasCarrier Frequency Offset Estimation for OFDM SignalsSagar SalweAún no hay calificaciones
- United States Patent: (75) Inventors: Yoshiaki Saito, Hitachinaka (JP)Documento9 páginasUnited States Patent: (75) Inventors: Yoshiaki Saito, Hitachinaka (JP)rahmat jalaluddinAún no hay calificaciones
- US006034947A Cross Connection System for Time Division Multiplexed SignalsDocumento44 páginasUS006034947A Cross Connection System for Time Division Multiplexed SignalsRoberto Nicolas AlburquequeAún no hay calificaciones
- III IIHHIIII US005274458AVideo Camera Digital Signal ProcessingDocumento7 páginasIII IIHHIIII US005274458AVideo Camera Digital Signal ProcessingIvana BanićevićAún no hay calificaciones
- IBM Thinkpad T23 SchematicsDocumento70 páginasIBM Thinkpad T23 Schematicsحسن علي نوفلAún no hay calificaciones
- Us 6169433Documento10 páginasUs 6169433Emer nelsonAún no hay calificaciones
- Digital G&SRDocumento202 páginasDigital G&SRK Durga Vara PrasadAún no hay calificaciones
- US8594149Documento20 páginasUS8594149jackjonesAún no hay calificaciones
- SPLN - 18B - 1979-Pedoman Penerapan Pengubah Sadapan BerbebanDocumento12 páginasSPLN - 18B - 1979-Pedoman Penerapan Pengubah Sadapan Berbebanreni aprilianaAún no hay calificaciones
- Us 4499640Documento10 páginasUs 4499640Daniela ScobarAún no hay calificaciones
- United States Patent (10) Patent No.: US 8,949,024 B2Documento16 páginasUnited States Patent (10) Patent No.: US 8,949,024 B2Daniela ScobarAún no hay calificaciones
- United States Patent: West Islip, N.YDocumento9 páginasUnited States Patent: West Islip, N.YDaniela ScobarAún no hay calificaciones
- Us 5689268Documento9 páginasUs 5689268Daniela ScobarAún no hay calificaciones
- Us 9608334Documento19 páginasUs 9608334Daniela ScobarAún no hay calificaciones
- May 18, 1965 C. H. Chlo 3,184,737: Filed March 28, 1963 2. Sheets-Sheet LDocumento6 páginasMay 18, 1965 C. H. Chlo 3,184,737: Filed March 28, 1963 2. Sheets-Sheet LDaniela ScobarAún no hay calificaciones
- Patent Application Publication (10) Pub. No.: US 2011/0084871 A1Documento26 páginasPatent Application Publication (10) Pub. No.: US 2011/0084871 A1Daniela ScobarAún no hay calificaciones
- Introduction To Patent Map Analysis2011Documento50 páginasIntroduction To Patent Map Analysis2011Ngọc Quyền PhạmAún no hay calificaciones
- United States Patent: MccorkleDocumento26 páginasUnited States Patent: MccorkleDaniela ScobarAún no hay calificaciones
- Modular vehicle radar system with improved thermal designDocumento11 páginasModular vehicle radar system with improved thermal designDaniela ScobarAún no hay calificaciones
- United States Patent (10) Patent No.: US 9.255,988 B2Documento12 páginasUnited States Patent (10) Patent No.: US 9.255,988 B2Daniela ScobarAún no hay calificaciones
- United States Patent: BinzerDocumento7 páginasUnited States Patent: BinzerDaniela ScobarAún no hay calificaciones
- United States Patent (19) : JordanDocumento15 páginasUnited States Patent (19) : JordanDaniela ScobarAún no hay calificaciones
- Wipo Ip Bis Ge 03 16-Annex1 PDFDocumento23 páginasWipo Ip Bis Ge 03 16-Annex1 PDFDaniela ScobarAún no hay calificaciones
- 07060395Documento6 páginas07060395yorashakimarthaAún no hay calificaciones
- United States Patent: Kinghorn Et Al. Apr. 23, 2002Documento7 páginasUnited States Patent: Kinghorn Et Al. Apr. 23, 2002Daniela ScobarAún no hay calificaciones
- Aug. 5, 1969 R. H. Logan 3,460,140: Filed June 29, 1967 2 Sheets-Sheet LDocumento6 páginasAug. 5, 1969 R. H. Logan 3,460,140: Filed June 29, 1967 2 Sheets-Sheet LDaniela ScobarAún no hay calificaciones
- Direct-to-Digital Software-Defined Radar PatentDocumento13 páginasDirect-to-Digital Software-Defined Radar PatentDaniela ScobarAún no hay calificaciones
- Us 5047785Documento13 páginasUs 5047785Daniela ScobarAún no hay calificaciones
- United States Patent (10) Patent No.: US 8,949,024 B2Documento16 páginasUnited States Patent (10) Patent No.: US 8,949,024 B2Daniela ScobarAún no hay calificaciones
- United States Patent: (10) Patent No.: (45) Date of PatentDocumento34 páginasUnited States Patent: (10) Patent No.: (45) Date of PatentDaniela ScobarAún no hay calificaciones
- Us 4096480Documento6 páginasUs 4096480Daniela ScobarAún no hay calificaciones
- United States Patent: (10) Patent No.: US 6,473,027 B1Documento19 páginasUnited States Patent: (10) Patent No.: US 6,473,027 B1Daniela ScobarAún no hay calificaciones
- Us 7375802Documento13 páginasUs 7375802Daniela ScobarAún no hay calificaciones
- Us 6927725Documento7 páginasUs 6927725Daniela ScobarAún no hay calificaciones
- Secondary Surveillance Radar SSR IdentificationDocumento51 páginasSecondary Surveillance Radar SSR IdentificationAnonymous cb2blyVKFrAún no hay calificaciones
- Rspa2l PDFDocumento165 páginasRspa2l PDFDaniela ScobarAún no hay calificaciones
- Secondary Surveillance Radar Parameters Extraction by Using SIF/IFF Responses AnalysisDocumento8 páginasSecondary Surveillance Radar Parameters Extraction by Using SIF/IFF Responses AnalysisDaniela ScobarAún no hay calificaciones
- NY Regents Chemistry Exam Scoring KeyDocumento12 páginasNY Regents Chemistry Exam Scoring KeyAAVANIAún no hay calificaciones
- Balancing Procedure Method - SKF ArticleDocumento6 páginasBalancing Procedure Method - SKF ArticlebackvlackoAún no hay calificaciones
- L&T Project ReportDocumento48 páginasL&T Project Reportdeepakarora201188Aún no hay calificaciones
- Digital Booklet - Re-AnimatorDocumento21 páginasDigital Booklet - Re-AnimatorMoz77Aún no hay calificaciones
- Physics QuestionsDocumento25 páginasPhysics QuestionsCarlos KasambiraAún no hay calificaciones
- Liquid Nitrogen Safety TrainingDocumento21 páginasLiquid Nitrogen Safety TrainingSteven James CapuanoAún no hay calificaciones
- TP PDFDocumento1 páginaTP PDFRîkèñ PâtélAún no hay calificaciones
- Contrasts Between Finite and Infinite Dimensional Spaces and Between Normed and Inner Product SpacesDocumento5 páginasContrasts Between Finite and Infinite Dimensional Spaces and Between Normed and Inner Product SpacesQuinton WestrichAún no hay calificaciones
- M A I N T e N A N C e M A N U A L F o R La B o R at o R y e Q U I P M e N TDocumento77 páginasM A I N T e N A N C e M A N U A L F o R La B o R at o R y e Q U I P M e N TBMTAún no hay calificaciones
- Raising New Generation Leaders Through Mechanics EducationDocumento88 páginasRaising New Generation Leaders Through Mechanics EducationOluwaferanmi OgunleyeAún no hay calificaciones
- 2nd Mid Assingnment QuestionsDocumento3 páginas2nd Mid Assingnment QuestionsSatya TejaAún no hay calificaciones
- Surveying Lecture 1Documento39 páginasSurveying Lecture 1Ruel Torres50% (4)
- Introduction To Chemical CleaningDocumento28 páginasIntroduction To Chemical Cleaningmordidomi0% (1)
- 01 11 20-Cta5Documento36 páginas01 11 20-Cta5Goury ShankarAún no hay calificaciones
- Maths Take Home Pack Gr.7 T3 W6Documento24 páginasMaths Take Home Pack Gr.7 T3 W6Muhammed ChopdatAún no hay calificaciones
- Masterbatches protect plastics from UV damageDocumento1 páginaMasterbatches protect plastics from UV damageSidharth JainAún no hay calificaciones
- 2-d. Statically Indeterminate Members: Ans. 3330 KNDocumento2 páginas2-d. Statically Indeterminate Members: Ans. 3330 KNJasleneDimarananAún no hay calificaciones
- Senior Flexonics Metal Hose Catalogue PDFDocumento40 páginasSenior Flexonics Metal Hose Catalogue PDFAnonymous nw5AXJqjdAún no hay calificaciones
- Preparation, Structure and Morphology of Polymer Supports: David C. SherringtonDocumento12 páginasPreparation, Structure and Morphology of Polymer Supports: David C. Sherringtonkishorkumarn8212Aún no hay calificaciones
- Lucas TuningDocumento12 páginasLucas TuningMichael RohrAún no hay calificaciones
- CBSE Class 9 Work and Energy PDFDocumento5 páginasCBSE Class 9 Work and Energy PDFRitesh PandeyAún no hay calificaciones
- Cobar 1400 Yumlu Mining With Paste FillDocumento26 páginasCobar 1400 Yumlu Mining With Paste FillSayantan ChakrabortyAún no hay calificaciones
- Astm 1500 2012Documento5 páginasAstm 1500 2012Hugo MtzaAún no hay calificaciones
- Trapezoidal Rule and Simpson's RuleDocumento5 páginasTrapezoidal Rule and Simpson's RuleSai VandanaAún no hay calificaciones
- Gas Welding: Name: Muhammad Farulfitri Bin Abd Gafar Matrix No.: 14DEM19F1047Documento11 páginasGas Welding: Name: Muhammad Farulfitri Bin Abd Gafar Matrix No.: 14DEM19F1047Farul FitriAún no hay calificaciones
- Extraction in Chemical Technology PrincipleDocumento24 páginasExtraction in Chemical Technology PrincipleFatima ZaharaAún no hay calificaciones
- HW5Documento2 páginasHW5Mohammad Iqbal Mahamad Amir100% (1)
- Sunon DC Brushless Fan & Blower - (190-E)Documento88 páginasSunon DC Brushless Fan & Blower - (190-E)1cisco1Aún no hay calificaciones
- Coherent Motions in The Turbulent Boundary Layer!: Stephen RobinsonDocumento39 páginasCoherent Motions in The Turbulent Boundary Layer!: Stephen RobinsonUmair IsmailAún no hay calificaciones
- Handbook of Magnetic PDFDocumento572 páginasHandbook of Magnetic PDFQassem MohaidatAún no hay calificaciones