También podría gustarte
- Vibra3 Uni 2020-1Documento11 páginasVibra3 Uni 2020-1Carlos HernándezAún no hay calificaciones
- Vibra3 Uni 2020 VDocumento15 páginasVibra3 Uni 2020 VH Rivera Oki AntonioAún no hay calificaciones
- Vibra3 Uni 2020-1Documento11 páginasVibra3 Uni 2020-1JUAN DANIEL VASQUEZ RENGIFOAún no hay calificaciones
- 1 FIS3117 C4 Video 6weweDocumento24 páginas1 FIS3117 C4 Video 6weweAlvaro Huenchullan NavarroAún no hay calificaciones
- Cargas PeriódicasDocumento21 páginasCargas PeriódicasGabriel Cifuentes RosenkranzAún no hay calificaciones
- Excitación Impulsiva e Integral de DuhamelDocumento16 páginasExcitación Impulsiva e Integral de Duhamelcarlos roderAún no hay calificaciones
- Unidad 9 Fisica General I - M3Documento37 páginasUnidad 9 Fisica General I - M3reysgardAún no hay calificaciones
- Bloque 3 OndasDocumento72 páginasBloque 3 OndasGonzalo Delgado CrespoAún no hay calificaciones
- 08 Diseño Sismorresistente Sistemas Armonicos 1GLDocumento14 páginas08 Diseño Sismorresistente Sistemas Armonicos 1GLAlejandro Cortijo CastilloAún no hay calificaciones
- Energía Cinética en El MDocumento10 páginasEnergía Cinética en El MJhonatan SanchezAún no hay calificaciones
- Apunte Tecnico - Oscilaciones de 1 GDL - ANYWHODocumento44 páginasApunte Tecnico - Oscilaciones de 1 GDL - ANYWHOEdison Segama GuzmánAún no hay calificaciones
- Movimiento armónico: periodo, frecuencia y ecuacionesDocumento10 páginasMovimiento armónico: periodo, frecuencia y ecuacionesAlex Zander HanccoAún no hay calificaciones
- OSCILACIONESDocumento16 páginasOSCILACIONESanabelenn100% (6)
- 2022 - EIP #2 RespuestasDocumento2 páginas2022 - EIP #2 RespuestasMilagros PereyraAún no hay calificaciones
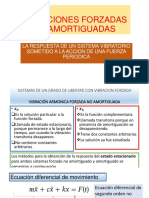
- Vibración forzada no amortiguada: causas y soluciónDocumento3 páginasVibración forzada no amortiguada: causas y soluciónAlejandra Katherine Sanchez MezaAún no hay calificaciones
- Unidad 6 DinámicaDocumento15 páginasUnidad 6 DinámicaItzel Sarai Lázaro CerinoAún no hay calificaciones
- VIBRACIONES FORZADAS NO AMORTIGUADAS - OutputDocumento46 páginasVIBRACIONES FORZADAS NO AMORTIGUADAS - OutputALEX ALEJANDRO ANDRANGO PAILLACHOAún no hay calificaciones
- Equilibrio de cuerpo rígido Mecánica VectorialDocumento14 páginasEquilibrio de cuerpo rígido Mecánica VectorialBruce VegaAún no hay calificaciones
- Laboratorio - Oscilaciones ForzadasDocumento2 páginasLaboratorio - Oscilaciones ForzadasNanfer PereaAún no hay calificaciones
- Sistemas Con Un Grado de Libertad Sin AmortiguacionDocumento35 páginasSistemas Con Un Grado de Libertad Sin AmortiguacionGabriel Mendoza ArauzAún no hay calificaciones
- Tema 7-Movimiento PeriodicoDocumento21 páginasTema 7-Movimiento PeriodicoRamón SánchezAún no hay calificaciones
- tema_02_masDocumento12 páginastema_02_masjosemanuel.moreno.2tAún no hay calificaciones
- S5 - PPT - Momento Respecto A Un Eje y Simplificación de Un Sistema Fuerza ParDocumento37 páginasS5 - PPT - Momento Respecto A Un Eje y Simplificación de Un Sistema Fuerza ParCinthya Estefany Rios QuicañoAún no hay calificaciones
- Laboratorio 7Documento4 páginasLaboratorio 7Karen SanchezAún no hay calificaciones
- Practica 1 Lab. Avanzada Grupo 1Documento21 páginasPractica 1 Lab. Avanzada Grupo 1lolo crackAún no hay calificaciones
- Páginas Desde#fórmulas y Conceptos de Física Bachiller 2Documento1 páginaPáginas Desde#fórmulas y Conceptos de Física Bachiller 2danielitoAún no hay calificaciones
- Capitulo III-Texto Mecanica de Solidos I-Setiembre 2012 PDFDocumento29 páginasCapitulo III-Texto Mecanica de Solidos I-Setiembre 2012 PDFdcalderon2880801Aún no hay calificaciones
- Movimiento OscilatorioDocumento23 páginasMovimiento OscilatorioGabriela ArtesanaAún no hay calificaciones
- AmortiguaciónDocumento6 páginasAmortiguaciónAlan1805Aún no hay calificaciones
- Informe Final MaferDocumento9 páginasInforme Final MaferJose SotomayorAún no hay calificaciones
- Resumen MAS (1) Merged Organized PDFDocumento7 páginasResumen MAS (1) Merged Organized PDFGabriela EliasAún no hay calificaciones
- Ae1 TP4 TeoríaDocumento20 páginasAe1 TP4 TeoríaMateo De LetisAún no hay calificaciones
- Fisica II - Proyecto de Movimiento OscilatorioDocumento8 páginasFisica II - Proyecto de Movimiento OscilatorioAdriana MichelleAún no hay calificaciones
- Capítulo - F2 - MASDocumento46 páginasCapítulo - F2 - MASFiorela arellanoAún no hay calificaciones
- Equilibrio de FuerzasDocumento9 páginasEquilibrio de FuerzasJeckser Asbell Juarez TemocheAún no hay calificaciones
- Monografía OscilacionesDocumento13 páginasMonografía OscilacionesGus Son of HadesAún no hay calificaciones
- Análisis de vibraciones mecánicas en sistemas de masa resorteDocumento6 páginasAnálisis de vibraciones mecánicas en sistemas de masa resorteMendoza Mamani Marvin RoynerAún no hay calificaciones
- s10 U4 3 Ecuaciones Vibraciones ForzadasDocumento40 páginass10 U4 3 Ecuaciones Vibraciones ForzadasJorge EsquerreAún no hay calificaciones
- 07 Laboratorio 4 Movimiento ArmónicoDocumento17 páginas07 Laboratorio 4 Movimiento ArmónicoGonzalo Barrios AmesquitaAún no hay calificaciones
- Taller - Completo-Movimiento Oscilatorio y OndaDocumento6 páginasTaller - Completo-Movimiento Oscilatorio y Ondasantiago ruiz piedrahitaAún no hay calificaciones
- Clase4 Fi204 22iDocumento19 páginasClase4 Fi204 22iCarlos Daniel Álvarez RojasAún no hay calificaciones
- 07 Laboratorio 4 Movimiento ArmónicoDocumento10 páginas07 Laboratorio 4 Movimiento ArmónicoArnold Romel AlarconAún no hay calificaciones
- Movimiento Armonico Simple (M.A.S.) : Análisis de La Función SenoDocumento11 páginasMovimiento Armonico Simple (M.A.S.) : Análisis de La Función SenoAlan Ramirez RojasAún no hay calificaciones
- Conceptos y definiciones en ingeniería biomédicaDocumento10 páginasConceptos y definiciones en ingeniería biomédicaMyrna Lucía Tamayo ChávezAún no hay calificaciones
- Vibración Mecánica111Documento21 páginasVibración Mecánica111brayanAún no hay calificaciones
- Analisis VibracionalDocumento49 páginasAnalisis VibracionalRichard Alfredo López Rios50% (2)
- UiuiuiuDocumento20 páginasUiuiuiuMarco Cisneros,Yheferson Maza,Diego Díaz,Jairo Giohayro,David Samamé,Gino Cuadros,Ricardo TrinidadAún no hay calificaciones
- Movimiento Armónico Simple - EcuRedDocumento7 páginasMovimiento Armónico Simple - EcuRedjosyilAún no hay calificaciones
- Vibraciones libres no amortiguadasDocumento15 páginasVibraciones libres no amortiguadasJoséAún no hay calificaciones
- 25 MasDocumento7 páginas25 MaspedrohernandezalconAún no hay calificaciones
- Vibraciones Armónicas ForzadasDocumento50 páginasVibraciones Armónicas ForzadasLuis'm CorreaAún no hay calificaciones
- 80 Oscilaciones y MasDocumento14 páginas80 Oscilaciones y MasLeonardo Anton RamirezAún no hay calificaciones
- Estática - Simplificación de Sistemas de Fuerzas y ParesDocumento22 páginasEstática - Simplificación de Sistemas de Fuerzas y ParesDneos ColqueAún no hay calificaciones
- Oscilaciones ForzadasDocumento13 páginasOscilaciones ForzadasLance BryantAún no hay calificaciones
- Ejercicios de potencia, series de Taylor y FourierDe EverandEjercicios de potencia, series de Taylor y FourierAún no hay calificaciones
- Ejercicios de Integrales y Ecuaciones Integrales-DiferencialesDe EverandEjercicios de Integrales y Ecuaciones Integrales-DiferencialesAún no hay calificaciones
- AWDAWDDocumento61 páginasAWDAWDditer najarAún no hay calificaciones
- Boletin CPR03Documento3 páginasBoletin CPR03m2163Aún no hay calificaciones
- 1 - Dieter1Documento16 páginas1 - Dieter1diter najarAún no hay calificaciones
- ALARP: Tan bajo como sea razonablemente factibleDocumento31 páginasALARP: Tan bajo como sea razonablemente factiblediter najar100% (1)
- Vibracion Forzada A Excitacion CualquieraDocumento17 páginasVibracion Forzada A Excitacion Cualquieraditer najarAún no hay calificaciones
- Marpol PDFDocumento79 páginasMarpol PDFMoises Carrera AnguloAún no hay calificaciones
- Dinámica de Un BuqueDocumento5 páginasDinámica de Un BuqueGabriel RosellóAún no hay calificaciones
- Ssma PDFDocumento14 páginasSsma PDFditer najarAún no hay calificaciones
- Ssma PDFDocumento14 páginasSsma PDFditer najarAún no hay calificaciones
- Tupa OsinergminDocumento40 páginasTupa Osinergminditer najarAún no hay calificaciones
- Marco Normativo GeneralDocumento23 páginasMarco Normativo Generalditer najar100% (1)
- Trasp Marit Esp EstibDocumento72 páginasTrasp Marit Esp Estibditer najarAún no hay calificaciones
- Criterio de Estabilidad MaxsurfDocumento4 páginasCriterio de Estabilidad Maxsurfditer najar0% (1)
- Tupa OsinergminDocumento40 páginasTupa Osinergminditer najarAún no hay calificaciones
- 043 2007 em PDFDocumento36 páginas043 2007 em PDFwinnyAún no hay calificaciones
- COONBTFDocumento1 páginaCOONBTFditer najarAún no hay calificaciones
- Analisis Quimico: Cemento Portland Puzolanico Tipo Ip "Atlas"Documento2 páginasAnalisis Quimico: Cemento Portland Puzolanico Tipo Ip "Atlas"diter najarAún no hay calificaciones
- Practica 1 ModeloDocumento27 páginasPractica 1 Modeloditer najarAún no hay calificaciones
- Descripción:: Cemento Portland Tipo I "Sol"Documento4 páginasDescripción:: Cemento Portland Tipo I "Sol"diter najarAún no hay calificaciones
- Analisis Quimico: Cemento Portland Tipo I "Sol"Documento2 páginasAnalisis Quimico: Cemento Portland Tipo I "Sol"diter najarAún no hay calificaciones
- Solucionario Examen Final, 2015-I, Aut - R PEREZDocumento5 páginasSolucionario Examen Final, 2015-I, Aut - R PEREZditer najar100% (1)
- Cemento puzolánico AtlasDocumento4 páginasCemento puzolánico Atlasditer najarAún no hay calificaciones
- Motores de Combustión Interna PDFDocumento94 páginasMotores de Combustión Interna PDFPercy OyoloAún no hay calificaciones
- Sesion 8-2015-2-VIBRACION LIBRE AMORTIGUADA PDFDocumento43 páginasSesion 8-2015-2-VIBRACION LIBRE AMORTIGUADA PDFditer najarAún no hay calificaciones
- AtuneroDocumento759 páginasAtuneroditer najarAún no hay calificaciones
- 8.proceso GmawDocumento48 páginas8.proceso Gmawditer najarAún no hay calificaciones
- Seguridad en SoldaduraDocumento85 páginasSeguridad en SoldaduraCesar La Torre Ramirez100% (1)
- Especialidades Scouts: Deportes y actividades al aire libreDocumento55 páginasEspecialidades Scouts: Deportes y actividades al aire libreAnny SfmAún no hay calificaciones
- Psicología Del Aprendizaje - Sem 2Documento54 páginasPsicología Del Aprendizaje - Sem 2Sueños de LunaAún no hay calificaciones
- Bloque II Parte 1 - 1Documento17 páginasBloque II Parte 1 - 1Martin IzaguirreAún no hay calificaciones
- WEG Casos de Exito Weg Motores 50035419 Estudio de Caso EspanolDocumento60 páginasWEG Casos de Exito Weg Motores 50035419 Estudio de Caso EspanolFrancisco AlejandroAún no hay calificaciones
- Cosecha Palma de AceiteDocumento49 páginasCosecha Palma de AceiteBIOQUIMICAMETABOLICA100% (2)
- Grados Militares FANB 38Documento5 páginasGrados Militares FANB 38Carla LozadaAún no hay calificaciones
- CeromerosDocumento22 páginasCeromerosCaro OrtegaAún no hay calificaciones
- Preauditoría análisis entidadDocumento3 páginasPreauditoría análisis entidadFlorAún no hay calificaciones
- FecundaciónDocumento3 páginasFecundaciónELIA MERITXELL JACOME MOROAún no hay calificaciones
- wuolah-free-GD PRIMARIA TFGDocumento8 páginaswuolah-free-GD PRIMARIA TFGOposiciones Docentes CuencaAún no hay calificaciones
- CronogramaDocumento11 páginasCronogramaJulian Felipe AVILA SILVAAún no hay calificaciones
- Del Rosario Francisco-Unidad 4. Actividad 1Documento3 páginasDel Rosario Francisco-Unidad 4. Actividad 1francisco del rosarioAún no hay calificaciones
- Indicadores en Música ProfesoresDocumento45 páginasIndicadores en Música ProfesoresfelicreazAún no hay calificaciones
- Crédito - Escalafonario para Docentes - Alejandra - Cct16des0058rDocumento2 páginasCrédito - Escalafonario para Docentes - Alejandra - Cct16des0058rMartin Gonzalez RubioAún no hay calificaciones
- Sesión Religion #16Documento5 páginasSesión Religion #16Victoria Valdez ugarteAún no hay calificaciones
- GestiónEmpresarialProcesosDocumento29 páginasGestiónEmpresarialProcesosVíctor CarrascoAún no hay calificaciones
- Eritroenzimopatias Hereditarias PDFDocumento15 páginasEritroenzimopatias Hereditarias PDFRODOLFO ORTIZAún no hay calificaciones
- Ortodoncia Bishara 644 PagDocumento10 páginasOrtodoncia Bishara 644 Pagpedro picapiedra0% (2)
- Analisis de La Obra Literaria Cara SuciaDocumento2 páginasAnalisis de La Obra Literaria Cara SuciaAbigail Chacon Millares57% (68)
- Bianco 2 ESPAÑOL 6 GRADODocumento19 páginasBianco 2 ESPAÑOL 6 GRADOBolivar Concepcion PrescottAún no hay calificaciones
- Elaboracion de Ladrillos de Arcilla Artesanal.Documento5 páginasElaboracion de Ladrillos de Arcilla Artesanal.richard aroneAún no hay calificaciones
- Monitor Carewell HVDocumento1 páginaMonitor Carewell HVrene100% (2)
- Redes General 2021 V1. Sa869Documento286 páginasRedes General 2021 V1. Sa869Jesus Rodriguez PaviotAún no hay calificaciones
- Laboratorio Clinico Veterinario UBIDocumento3 páginasLaboratorio Clinico Veterinario UBIJorge AguilarAún no hay calificaciones
- Clasificacion Macizos RocososDocumento49 páginasClasificacion Macizos Rocososgeovanny alcivarAún no hay calificaciones
- Metrados Acondicionar A InguilpataDocumento150 páginasMetrados Acondicionar A InguilpataHectorNuñezLopezAún no hay calificaciones
- Recursos naturales renovables y no renovablesDocumento4 páginasRecursos naturales renovables y no renovablesEricka Cobox100% (1)
- Trabajo Final Eventos Deportivos.Documento8 páginasTrabajo Final Eventos Deportivos.Jorge Daniel Cifuentes SepulvedaAún no hay calificaciones
- Delgado Leandro - UrDocumento150 páginasDelgado Leandro - UrLorena Lazo LeivaAún no hay calificaciones
- Pruebas de Bondad y AjusteDocumento4 páginasPruebas de Bondad y AjusteFernando Solís LeónAún no hay calificaciones