También podría gustarte
- Proyecto Evacuacion Mundial Comando Ashtar TuellaDocumento133 páginasProyecto Evacuacion Mundial Comando Ashtar TuellaJuan Garzon83% (6)
- La Manifestacion de Un Ser de Luz PdfcreatorDocumento116 páginasLa Manifestacion de Un Ser de Luz PdfcreatorConstanza AtriaAún no hay calificaciones
- Ejercicios de PorcentajesDocumento4 páginasEjercicios de PorcentajesCerveza Veinticuatro HorasAún no hay calificaciones
- Libro Matematicas Preescolar - KeyDocumento132 páginasLibro Matematicas Preescolar - KeyClaudio Velas100% (1)
- Teoría de redes y sus aplicaciones en ingeniería industrialDocumento4 páginasTeoría de redes y sus aplicaciones en ingeniería industrialquiriamAún no hay calificaciones
- Teoría del color y subtonos de la pielDocumento5 páginasTeoría del color y subtonos de la pielAndrea Humeres50% (2)
- Curva BraquistócronaDocumento5 páginasCurva BraquistócronaMichel Marcos García BadilloAún no hay calificaciones
- Espectrofotómetro: ¿Qué es y cómo funcionaDocumento2 páginasEspectrofotómetro: ¿Qué es y cómo funcionaDulce GarciaAún no hay calificaciones
- Teoría de grafos y sus elementos básicosDocumento39 páginasTeoría de grafos y sus elementos básicosmanuelrosemaryAún no hay calificaciones
- Ensayo de Refracción en Vidrio para Determinar Su Indice de Refracción, 2Documento5 páginasEnsayo de Refracción en Vidrio para Determinar Su Indice de Refracción, 2Cristhian Sanchez PichenAún no hay calificaciones
- 1959 - Toranzos - Enseñanza de La MatemáticaDocumento205 páginas1959 - Toranzos - Enseñanza de La Matemáticaradutari100% (1)
- Tarea Física Moderna - U2 - Tema 1 - JSMDocumento5 páginasTarea Física Moderna - U2 - Tema 1 - JSMflor quingaAún no hay calificaciones
- Calculo Vectorial-Produccion FinalDocumento10 páginasCalculo Vectorial-Produccion Finaljulio cesar Rodriguez de la RosaAún no hay calificaciones
- Tarea No 1 Optica y Fisica ModernaDocumento7 páginasTarea No 1 Optica y Fisica ModernaJose SolisAún no hay calificaciones
- Modellus 4.01Documento18 páginasModellus 4.01Mario Alberto BianchiAún no hay calificaciones
- Álgebra Lineal y Geometría AnalíticaDocumento10 páginasÁlgebra Lineal y Geometría AnalíticaHenryAún no hay calificaciones
- FisicaDocumento25 páginasFisicaDanny Guerra EnriqueAún no hay calificaciones
- Cálculo Vectorial Técnicas AprendizajeDocumento15 páginasCálculo Vectorial Técnicas AprendizajeCs De AnhejAún no hay calificaciones
- Medicion de La Velocidad de La Luz FizeauDocumento1 páginaMedicion de La Velocidad de La Luz FizeauDiego B MateoAún no hay calificaciones
- Secuencia de Encendido de LEDsDocumento3 páginasSecuencia de Encendido de LEDsMarifer GalvezAún no hay calificaciones
- Trabajo Final de Iniciacion A La Fisica-2013Documento6 páginasTrabajo Final de Iniciacion A La Fisica-2013Xgamerbass AlvaroAún no hay calificaciones
- Unidad 5 Calculo VectorialDocumento14 páginasUnidad 5 Calculo VectorialFranco Medina ZamudioAún no hay calificaciones
- Teoría de GruposDocumento2 páginasTeoría de GruposCarlos Enrique Rosas Lira100% (1)
- Serie Binomial y Binomio de NewtonDocumento13 páginasSerie Binomial y Binomio de NewtonJosue Ivan Tepatzi AmaroAún no hay calificaciones
- Aplicaciones de la ecuación Q=mcΔT en ingenieríaDocumento2 páginasAplicaciones de la ecuación Q=mcΔT en ingenieríaRoger Antonio Pérez GonzálezAún no hay calificaciones
- Cálculo Vectorial - Programa SintéticoDocumento4 páginasCálculo Vectorial - Programa SintéticoISmael MEdina LOpez100% (1)
- Aplicación de Los Modelos Cuadráticos en La FisicaDocumento5 páginasAplicación de Los Modelos Cuadráticos en La FisicaHernan PosliguaAún no hay calificaciones
- CILINDROS Y SUPERFICIES CUADRICAS Calculovariasvariables-Thomas12edicionDocumento5 páginasCILINDROS Y SUPERFICIES CUADRICAS Calculovariasvariables-Thomas12edicionJuan Diego Tamayo ChinchillaAún no hay calificaciones
- SEPARATA Nº19 - FISICA - CAMPO ELECTRICO - Distribuciones Discretas de Carga-1Documento8 páginasSEPARATA Nº19 - FISICA - CAMPO ELECTRICO - Distribuciones Discretas de Carga-1Luis EnriqueAún no hay calificaciones
- 07 Gravitacion 01 PDFDocumento1 página07 Gravitacion 01 PDFDiego Alejandro0% (1)
- Tarea. DMLDocumento2 páginasTarea. DMLMichael Ortiz100% (1)
- Guía de estudio electromagnetismo: Fuerza de Lorentz y leyes de Biot-Savart, Ampere y FaradayDocumento2 páginasGuía de estudio electromagnetismo: Fuerza de Lorentz y leyes de Biot-Savart, Ampere y FaradayMiguel angel Bautista SilvaAún no hay calificaciones
- Taller Segundo SeguimientoDocumento1 páginaTaller Segundo SeguimientoJuanKa100% (1)
- Fisica para Decimo GradoDocumento4 páginasFisica para Decimo GradoJose CordobaAún no hay calificaciones
- Análisis Grafico Ii.1Documento9 páginasAnálisis Grafico Ii.1Marckuz MendietaAún no hay calificaciones
- Algoritmo TarjaneDocumento9 páginasAlgoritmo Tarjanevictor orlando sierra foreroAún no hay calificaciones
- Electricidad y MagnetismoDocumento18 páginasElectricidad y MagnetismoPaul ManosalvasAún no hay calificaciones
- 02 Practico Conjuntos y RelacionesDocumento3 páginas02 Practico Conjuntos y RelacionesPabloLedesmaAún no hay calificaciones
- Mesa de VectoresDocumento6 páginasMesa de VectoresMisael RojasAún no hay calificaciones
- Maquina de Atwood: Determinacion de la aceleracionDocumento11 páginasMaquina de Atwood: Determinacion de la aceleracionRevollo NefiAún no hay calificaciones
- Taller N1 Ecuaciones e Inecuaciones PDFDocumento8 páginasTaller N1 Ecuaciones e Inecuaciones PDFGris_VerdeAún no hay calificaciones
- Capitulo6 LeithodDocumento8 páginasCapitulo6 LeithodPoleth López100% (1)
- MAGNITUDDocumento4 páginasMAGNITUDGharyAún no hay calificaciones
- Plan de Clase de La Ley de CoulombDocumento6 páginasPlan de Clase de La Ley de CoulombSebastian SierlegAún no hay calificaciones
- Principio de HamiltonDocumento7 páginasPrincipio de HamiltonJuanchis EBAún no hay calificaciones
- P5 - Práctica - Lab - Física Caída LibreDocumento6 páginasP5 - Práctica - Lab - Física Caída LibreJorge Andrés FárezAún no hay calificaciones
- Modelo de Datos Espaciales PDFDocumento5 páginasModelo de Datos Espaciales PDFYerzyd AlconAún no hay calificaciones
- Grafica Voltaje Vs Posición para Cada Configuración de Electrodos Placa PlacaDocumento4 páginasGrafica Voltaje Vs Posición para Cada Configuración de Electrodos Placa PlacaCRISTIAN IVAN PERLAZA CANDELA0% (1)
- Isomorfismo Entre Los Numeros Racionales y El Subcuerpo de Los Numeros RealesDocumento2 páginasIsomorfismo Entre Los Numeros Racionales y El Subcuerpo de Los Numeros RealesThe-wolf BicsAún no hay calificaciones
- Foro de Reforzamiento Calculo VectorialDocumento5 páginasForo de Reforzamiento Calculo VectorialHugo Alberto Ortiz AnayaAún no hay calificaciones
- Electricidad y MagnetismoDocumento16 páginasElectricidad y Magnetismoenrique gonzalez gomezAún no hay calificaciones
- Campo Magnético de Bobinas Pareadas en Arreglo de HelmholtzDocumento3 páginasCampo Magnético de Bobinas Pareadas en Arreglo de Helmholtzjorge ibañezAún no hay calificaciones
- Aplicacion Del Algebra LinealDocumento3 páginasAplicacion Del Algebra LinealAnita VázquezAún no hay calificaciones
- Interpretación geométrica de la derivada parcialDocumento14 páginasInterpretación geométrica de la derivada parcialronargotAún no hay calificaciones
- M A SDocumento3 páginasM A Slinar1988Aún no hay calificaciones
- Completo Ecuaciones Diferenciales Ordinarias IDocumento2 páginasCompleto Ecuaciones Diferenciales Ordinarias IWilliam GuadalupeAún no hay calificaciones
- Analisis Vectorial - PrimariaDocumento8 páginasAnalisis Vectorial - PrimariaBrunoAún no hay calificaciones
- Variedades LinealesDocumento20 páginasVariedades LinealesJuan Argayo100% (1)
- La Masa RelativistaDocumento2 páginasLa Masa Relativistajesus_parritaAún no hay calificaciones
- Principio de La Dualidad de La MateriaDocumento2 páginasPrincipio de La Dualidad de La MateriaJuan GonzalesAún no hay calificaciones
- GuiaETS LenguajeDeProgramacionDocumento11 páginasGuiaETS LenguajeDeProgramacionexcelencia5Aún no hay calificaciones
- Artículo - 2 - Física OkDocumento9 páginasArtículo - 2 - Física OkAngel TalaveraAún no hay calificaciones
- TPL 2 FisicaDocumento7 páginasTPL 2 FisicaMarttuPaezAún no hay calificaciones
- Gaikotsu Kishi-Sama Volumen 2 (TD CarlecBen)Documento162 páginasGaikotsu Kishi-Sama Volumen 2 (TD CarlecBen)ALBERT HAROLDAún no hay calificaciones
- Medición PMD fibra ópticaDocumento14 páginasMedición PMD fibra ópticaPaolo MartinezAún no hay calificaciones
- Iluminacion y Color ACHS PDFDocumento2 páginasIluminacion y Color ACHS PDFElizabethAnaliaGallardoCamposAún no hay calificaciones
- Informe de Laboratorio EL OJODocumento3 páginasInforme de Laboratorio EL OJOPaula DominiqueAún no hay calificaciones
- 2.2. - Apariencia y ColorDocumento29 páginas2.2. - Apariencia y ColorErick FaundezAún no hay calificaciones
- Oem 2020Documento2 páginasOem 2020Saray NiñoAún no hay calificaciones
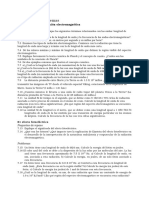
- Preguntas y problemas sobre teoría cuántica y radiación electromagnéticaDocumento11 páginasPreguntas y problemas sobre teoría cuántica y radiación electromagnéticaMauro Saucedo TellezAún no hay calificaciones
- Solucionario de Fasica General de Schaum 10ma EdicianDocumento41 páginasSolucionario de Fasica General de Schaum 10ma EdicianCristian MendozaAún no hay calificaciones
- 06 FarolasDocumento1 página06 Farolaslisseth arnidoAún no hay calificaciones
- El Témpano de Hielo de La MenteDocumento2 páginasEl Témpano de Hielo de La MenteRONALD LEONAún no hay calificaciones
- Informe 4 Fisica IVDocumento13 páginasInforme 4 Fisica IVDanielaAún no hay calificaciones
- Semana 2 - Lab. Virtual Espectros de Emisión - Química 1 - 2022-10Documento14 páginasSemana 2 - Lab. Virtual Espectros de Emisión - Química 1 - 2022-10Armando Calcina ColquiAún no hay calificaciones
- TUBOT5 13 &25wDocumento2 páginasTUBOT5 13 &25wAlicia AltamiranoAún no hay calificaciones
- QuimicaDocumento107 páginasQuimicaJuan Paulo100% (6)
- Fotointerpretacion EscalasDocumento216 páginasFotointerpretacion EscalasWilson Jaime Mangudo SolizAún no hay calificaciones
- Usando Gelatina y Laser para Explicar La Refraccion y ReflexionDocumento3 páginasUsando Gelatina y Laser para Explicar La Refraccion y ReflexionAlisha Campbell100% (1)
- EspectrofotometriaDocumento34 páginasEspectrofotometriaMijael Vega AcuñaAún no hay calificaciones
- MAX PLANCK - A Dónde Va La CienciaDocumento86 páginasMAX PLANCK - A Dónde Va La CienciaAntonio JesusAún no hay calificaciones
- Teoría Del AlcoirisDocumento14 páginasTeoría Del AlcoirisLuz MontañoAún no hay calificaciones
- Opengl 1Documento32 páginasOpengl 1ealg216Aún no hay calificaciones
- TP 10 Cinética Por Polarimetría - ActualizadaDocumento7 páginasTP 10 Cinética Por Polarimetría - ActualizadaMicaela Vicente DiazAún no hay calificaciones
- Liberación y gratitud al Reino ElementalDocumento17 páginasLiberación y gratitud al Reino ElementalElisa TezukaAún no hay calificaciones
- Tesis de Fenomeno de Transporte Transferencia de Calor Por RadiacionDocumento52 páginasTesis de Fenomeno de Transporte Transferencia de Calor Por Radiacionliz garciaAún no hay calificaciones
- Informe de Campaña OftamologicaDocumento4 páginasInforme de Campaña Oftamologicayoselyn cerna nayraAún no hay calificaciones