Volume 3, Issue 3, March– 2018 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Automatic Simulation Measurement and Verification
of Inputs and Outputs of Body Control Module
Vinaya CH Bagyaveereswaran .V
School of Electrical Engineering Professor, Select
Vellore Institute of Technology, Vellore Vellore Institute of Technology, Vellore
Chennai, India Chennai, India
Abstract:- An Electronic Control Unit is an embedded we have to model the environment parameters using
system that controls one or more electrical system in a MATLAB/Simulink. Then, manual testing using CANoe,
motor vehicle. Body control module (BCM) is one of most control desk and DSPACE. After that automate the testing
significant unit responsible for monitoring and controlling process using python programming.
main electronic accessories (exterior lights, interior lights, A. Tools And Software Used
door locking, immobilizer etc) related to body of a vehicle.
Manually testing the system is time consuming process. In CANoe
this project a new method is proposed to automate the CANoe is widely using for development and testing.
testing process using DSPACE and Python . It is from Vector Informatik GmbH. CANoe is mainly using in
automotive field. CANoe is using for development, analysis,
Keywords:- Body control Module, Flex ray, DSPACE, simulation, testing, diagnostics and start-up of ECU networks
MATLAB/SIMULINK, Control Desk, Python. and individual ECUs. Its widespread use and large number of
supported vehicle bus systems makes it especially well-suited
I. INTRODUCTION for ECU development in conventional vehicles, as well as
hybrid vehicles and electric vehicles. The simulation and
In automotive electronics, electronic control testing facilities in CANoe are performed with CAPL, a very
unit (ECU) is a generic term for any embedded system that interactive scripting language. CANoe
controls one or more of the electrical system or subsystems in supports CAN, LIN, FlexRay, Ethernet and MOST bus
a motor vehicle. The electronic control unit (ECU) acts like systems as well as CAN-based protocols such
the brain of the automobile: it receives signals from the as J1939, CANopen, ARINC 825, ISOBUS and many more.
various sensors and decides if and when each actuator should CANoe is a tool that supports the entire development process
be deployed. These ECUs are typically located in the middle for Networked systems
of the vehicle or beneath the front seat, where it is well
protected. Types of ECU include Electronic/engine Control DSPACE DS 1006 :
Module (ECM), Electric Power Steering (EPS),Instrument The DS1006 Processor Board is based on a single-
Panel Cluster(IPS), Brake Control Module (BCM or EBCM), core or a multicore AMD Opteron TM processor. This real-
Central Control Module (CCM), Central Timing Module time processor (RTP) is the main processing unit. It can access
(CTM), General Electronic Module (GEM), Body Control modular I/O boards via its PHS bus. It is multiprocessing-
Module (BCM), Steering Switches Module (SSM), Radio capable via the (optional) DS911 Gigalink Module. The
Receiver Module(RRM), Infotainment Module (ITM),control DS1006 Processor Board provides the following features.
unit, or control module. Taken together, these systems are Single-processor system means that your real-time application
sometimes referred to as the car's computer. Sometimes one is running on one single-core DS1006 board or one processor
assembly incorporates several of the individual control core of a multicore DS1006 board. Multiprocessor systems
modules (PCM is often both engine and transmission). Due to means that your real-time application is running on two or
advanced technology, some vehicles which are equipped with more single-core DS1006 boards, on two or more processor
advanced air bag systems, the ECU can also receive input cores of a multicore DS1006 board, on two or more multicore
from additional sensors that detect occupant weight, seating DS1006 boards, or a combination of all these. The DS1006
position, seat belt use, and seat position to determine the force uses a single-core or multicore AMD OpteronTM processor as
with which frontal air bags should deploy. The performance of
the real‑time processor (RTP). The RTP calculates your real-
ECU depends on vehicle capability. They have ability to self-
diagnosis and repair errors. For eg: If the ECU identifies a time models and accesses the I/O boards via the PHS bus. The
problem, the air bag readiness (warning) light will illuminate processor has a temperature sensor to prevent the processor
on the instrument panel. When the air bag readiness light is from overheating. During over heating software mechanism
illuminated, the air bag system might not perform properly in a terminates the real-time application and enters low power
crash. A body control module may control one or more mode. At an even higher temperature, a processor-internal
systems. The body control module which tested in this project mechanism (called AMD thermtrip) shuts down the CPU
controls 40 outputs. So manually testing the whole clock. This processor has Hyper Transport TM technology
performance of a controller is time consuming. So automation connection for high bandwidth and low latency access to I/O
is needed. In this project a new method is proposed to devices. Built-in memory controller for high-speed memory
automate the testing process using DSPACE and python. First, access.
IJISRT18MA428 www.ijisrt.com 665
Volume 3, Issue 3, March– 2018 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
II. MODELLING control testing. Instead of using the real vehicle, we are using
The first stage is modeling. The test environment DSPACE hardware in the loop (HIL) testing. During the
is created using MATLAB simulation with DSPACE testing, DSPACE will behave like a real time vehicle. In this
cards. The outputs related to body of the car are modeled project we are testing the body control module manually, and
using MATLAB simulation . There are 40 outputs related after that we are automating the testing process by using
body control in this project. The outputs are divided into python script.
three types. Analog output, digital output and PWM
output. By modeling, these outputs are assigned to Since this is a testing, we are not giving instruction to
different cards in DSPACE. DS4004 and DS2202 are the 2 BCM from driver side. Instead we are giving instruction
cards used in this project. Each output has a port number through flex ray as diagnostics requests. Through diagnostics
and a channel number. we can test whether the BCM is working properly or not. For
diagnostics we are using flex ray. By using flex ray we are
III. MANUAL TESTING sending the diagnostic request and through flex ray we are
After modeling the outputs, we need to test the CEM reading the responses. If we are testing manually, we can use
manually. For that DSPACE, Control Desk 5.4, CANoe are CANoe tool for sending diagnostics requests. If we are
the tools we used. Through flexray we can give the diagnostic automating the testing process, by python scripting we can
request message using CANoe diagnostic console. Then check give the diagnostic requests. And the response and the results
the output voltage using multimeter. If the expected output will print as an excel sheet.
voltage and actual output voltage are same, then we can
conclude that CEM is controlling properly. Simulation done in the MATLAB using DSPACE
cards are loaded in the DSPACE hardware. And by using
IV. AUTOMATING THE TESTING PROCESS control desk we can operate DSPACE. We have to give the
whole conditions for testing environment using control desk
After manual testing we need to automate the testing
procedure. For that DSPACE, Control Desk 5.4, are the tools tool. And we have to link with flex ray also. After that during
we used and Python is the software we used. Developed the manual testing, we can give the diagnostic request message
using CANoe diagnostic console. To send diagnostic request,
python script for automation and run the script using Control
we are using 2F service. When we give a request message ,that
Desk 5.4 in DSPACE HIL setup.
message will go to BCM through flex ray. If the BCM
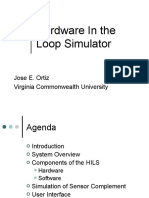
V. BLOCK DIAGRAM receives the diagnostic request message successfully, BCM
will send back a response message. That response message we
The above figure shows the block diagram for
can see through CANoe diagnostic console. After receiving
working of Central Electronic Module. A supply voltage Vb is
the diagnostic request the BCM will give proper control signal
provided for CEM. When we give an instruction to turn on or
to that particular output in DSPACE HIL setup. All inputs and
off an output by pressing switch at driver side of a vehicle, that
outputs are modeled in HIL setup. So the control signal from
instruction will go to BCM. BCM is the controller .So after
BCM will go to that particular output block. After that we
receiving the instruction from driver side, BCM will give
need to check whether the output is working according to the
proper control signal to the particular output to turn on or turn
requirement. For that we can check the voltage across the
off. This is happening in a real vehicle.
output using multimeter. If the output voltage is equal to
expected output voltage, the CEM is giving correct control
signal and it is working properly. This is manual testing.
Supply Voltage
Vb+ Vb-
The body control module we are testing, controls 40
outputs. The outputs are divided into digital outputs and to
BCM make the CEM status into ‘control to application’. For a high
Driver side O/P
side digital output, 1 indicate turn on and 0 indicate turn off.
For PWM outputs, we have to test the CEM for different
PWM’s. In this project we are testing for PWM’s 100%, 90%,
Vb+ Vb-
80%, 70%, 60%, and for 50% . That is ,through diagnostic
Flex Ray
request we will give instruction to controller to turn on the
Fig 1:- General block diagram for diagnostics
output in a particular PWM . Then we will check the output. If
the output turn on with given PWM value, we can conclude
The above figure shows the block diagram for
that the central electronic module is giving proper control
working of Central Electronic Module. A supply voltage Vb is
signal. So CEM is working properly for that output.
provided for CEM. When we give an instruction to turn on or
off an output by pressing switch at driver side of a vehicle, that
After manual testing, we need to automate the testing
instruction will go to BCM. BCM is the controller .So after
process. By automation, in a single step we can test all the
receiving the instruction from driver side, BCM will give
outputs. Automation is done using python scripts. Diagnostic
proper control signal to the particular output to turn on or turn
request for all the outputs can send through a single python
off. This is happening in a real vehicle.
script. The python script run through control desk. While
running the script, the diagnostic request will send to central
The project is we need to test whether the BCM is
electronic module through flex ray. If the request reached
giving proper control signal or not. This is an input output
IJISRT18MA428 www.ijisrt.com 666
Volume 3, Issue 3, March– 2018 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
successfully, the CEM will send back a positive response. And values 100%, 90%, 80%, 70%, 60%, and for 50% . That is
the CEM will send the required control signal to the ,through diagnostic request we will give instruction to
corresponding outputs. controller to turn on the output for a particular PWM . Then
we will check the output. If the output turn on with given
To compare with the expected output, we have to PWM value, we can conclude that the Body Control module is
read the output voltage from flex ray. After reading we have to giving proper control signal for turning on. Then we gave
compare with the expected output voltage. If the expected instruction for turning off the output. Then check whether the
output and the observed output is equal, result is pass, else output is turning off by using multimeter. After that we shift
result is fail. We have to print the output name, expected the controller working back to application. And check its
output, observed output and the result in separate columns in output. If the output voltage is equal to expected output
an excel sheet as a report. So during automatic testing, after voltage we can conclude that BCM is working properly for
running the script, result for all outputs will print in a single that output. In this method we have to check controller
excel sheet. By automation work became simple, just we need performance for every outputs. This is manual testing and
to analyze the report. No need to measure the voltage of the manual testing is time consuming. So we need to go for
outputs individually as in manual testing. automation. That is automating the testing process
VII. AUTOMATED TESTING
VI. MANUAL TESTING The above figure shows the block diagram for
automated testing for checking the working of Body Control
Module. The project is we need to test whether the body
PC BCM L
control module is proper control signal or not. This is an input
output control testing. Instead of using the real vehicle, we are
M using DSPACE hardware in the loop (HIL) testing. During
the testing, DSPACE will behave like a real time vehicle. In
this project we are testing the central electronic module
manually, and after that we are automating the testing process
by using python script.
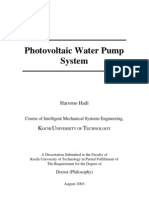
Fig 2:- Block diagram for manual testing
The above figure shows the block diagram for
manual testing of Body Control Module(BCM). The project is
we need to test whether the BCM is giving proper control
signal or not. This is an input output control testing. During
the testing, DSPACE will behave like a real time vehicle.
During manual testing, we can give the diagnostic request
message using CANoe diagnostic console. To send diagnostic
request, we are using ox2F service. When we give a request
message, that message will go to Body Control Module
through flex ray. If the BCM receives the diagnostic request
message successfully, Body Control Module will send back a
response message. That response message we can see through
CANoe diagnostic console. After receiving the diagnostic
request message the BCM will give proper control signal to
that particular output in DSAPCE HIL setup. All inputs and
outputs are modeled in HIL setup. And each output is
represented by an identifier. So the control signal from BCM
will go to that particular output block. After that we need to
check whether the output is working according to the
requirement. For that we can check the voltage across the
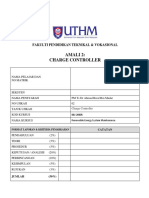
output using multimeter. If the output voltage is equal to Fig 3:- Results of manual testing
expected output voltage, the Body Control Module is giving
correct control signal and it is working properly. This is
manual testing. L
PC BCM
The Body Control module we are testing, controls 40
outputs. The outputs are divided into digital outputs and to
make the CEM status into ‘control to application’. For a high
side digital output, 1 indicate turn on and 0 indicate turn off.
For a low side digital output, 0 indicate turn on and 1 indicate
turn off. For PWM outputs, we have to test the BCM for
different PWM’s. In this project we are testing for PWM Fig 4:- Block diagram for automated testing
IJISRT18MA428 www.ijisrt.com 667
Volume 3, Issue 3, March– 2018 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Simulation done in the MATLAB using DSPACE VIII. RESULTS AND OBSERVATIONS
cards are loaded in the DSPACE hardware. And by using
control desk we can operate DSPACE. We have to give the In this project we test the controller manually and
whole conditions for testing environment using control desk then automate the testing process. We got the correct results
tool. And we have to link with flex ray also. while testing manually and automatically. The output of
manual testing is shown in fig.3. The flex ray diagnostic
The central electronic module we are testing, controls request and response message is shown in this figure. The
40 outputs. The outputs are divided into digital outputs and to output of automated testing is shown in fig.5. The output we
make the CEM status into ‘control to application’. For a high can see in the interpreter of control desk and in an excel sheet.
side digital output, 1 indicate turn on and 0 indicate turn off.
For PWM outputs, we have to test the CEM for different REFERENCES
PWM’s. In this project we are testing for PWM’s 100%, 90%,
80%, 70%, 60%, and for 50% . That is ,through diagnostic [1]. J. Novák and P. Kocourek, (2005) ‘Automated Testing of
request we will give instruction to controller to turn on the Electronic Control Units Compatibility in Vehicle CAN
output in a particular PWM . Then we will check the output. If Networks’, IEEE ISIE 1423-1430.
the output turn on with given PWM value, we can conclude [2]. Xinhong YANG, Yi LIN, Feng Gao , (2014) ‘ Automated
that the central electronic module is giving proper control Test System Design of Body Control Module ’, IEEE
signal. So BCM is working properly for that output. 1542-1546.
[3]. Anna Bladh (2014), ‘System Design of Automated Test
After that, we need to automate the testing process. Equipment for Electrical Control Units’, Master Thesis
By automation, in a single step we can test all the outputs. Electrical Measurement Technology 20-72.
Automation is done using python scripts. Diagnostic request [4]. Bhagyashri U.Wani , Dr. Sunita P. Ugale (2016),
for all the outputs can send through a single python script. The ‘Vehicle automation using controller Area Network’,
python script run through control desk. While running the International Research Journal of Engineering and
script, the diagnostic request will send to central electronic Technology 1195-1198.
module through flex ray. If the request reached successfully, [5]. Mr.Ajay Palkar, Ms.Priya Deshpande (2011)‘ Research
the CEM will send back a positive response. And the CEM Methodology for the Test Automation of Truck Controller
will send the required control signal to the corresponding Software System’, International Conference on
outputs. Environmental and Computer Science 104-111.
To compare with the expected output, we have to [6]. Fang Zhou, Shuqin Li, Xia Hou (2008) ‘Development
read the output voltage from flexray. After reading we have to Method of Simulation and Test System for Vehicle Body
compare with the expected output voltage. If the expected CAN Bus Based on CANoe’ IEEE Explore 7515-7519.
output and the observed output is equal, result is pass, else [7]. Xinhong Yang, Zhihua Yu, Mu Xiao, Guangbin Ji
result is fail. We have to print the output name, expected (2015) ‘Automated Test System Design Based on Tellus
output, observed output and the result in separate columns in for In-vehicle CAN Network’, IEEE Explore ( 118–122).
an excel sheet as a report. So during automatic testing, after [8]. www.vector.com/CANoe.
running the script, result for all outputs will print in a single [9]. http://www.delphi.com/manufacturers/auto/body-and
excel sheet. By automation work became simple, just we need security/body/body_ _cntrl_modules.
to analyze the report. No need to measure the voltage of the [10]. Daehyun Kum, Joonwoo Son, Seonbong Lee,(2013),‘
outputs individually as in manual testing. Model-Based Automated Validation Techniques for
Automotive Embedded Systems’, IEEE Explore 2964–
2968.
Fig 5:- Results for automated testing
IJISRT18MA428 www.ijisrt.com 668
También podría gustarte
- Guidebook To ISO26262Documento18 páginasGuidebook To ISO26262Евгений БульбаAún no hay calificaciones
- Electronic Control Module: Systems OperationDocumento6 páginasElectronic Control Module: Systems Operationanak haruanAún no hay calificaciones
- 17105-12 B12B DH12E CHN 149018-155480Documento206 páginas17105-12 B12B DH12E CHN 149018-155480MAJID SADEGHIANAún no hay calificaciones
- UDS Protocol Implementation in Automotiv PDFDocumento6 páginasUDS Protocol Implementation in Automotiv PDFviernes06Aún no hay calificaciones
- Simulation and Real Time Implementation of Motor Controller For 3ph Induction Motor Using MATLAB and dSPACEDocumento11 páginasSimulation and Real Time Implementation of Motor Controller For 3ph Induction Motor Using MATLAB and dSPACEShubham PatilAún no hay calificaciones
- Update UDS - FLASHDocumento2 páginasUpdate UDS - FLASHاليزيد بن توهاميAún no hay calificaciones
- Uds ImpDocumento6 páginasUds ImppriyaAún no hay calificaciones
- AUTOSAR For Dummies - #10 - AUTOSAR and ISO26262 - Automotive ElectronicsDocumento5 páginasAUTOSAR For Dummies - #10 - AUTOSAR and ISO26262 - Automotive ElectronicsSameer KumthekarAún no hay calificaciones
- Simulink-Targetlink Datatypes Defnt ProblemDocumento16 páginasSimulink-Targetlink Datatypes Defnt ProblemmonisivaAún no hay calificaciones
- From Simulink To Autosar Enabling Autosar Code Generation With Model Based DesignDocumento46 páginasFrom Simulink To Autosar Enabling Autosar Code Generation With Model Based Designdeepakdcb20102487Aún no hay calificaciones
- Simulink Coder 8.0: Generate C and C++ Code From Simulink and Stateflow ModelsDocumento6 páginasSimulink Coder 8.0: Generate C and C++ Code From Simulink and Stateflow ModelsVijayalaxmi BiradarAún no hay calificaciones
- TargetLink Product-InformationDocumento48 páginasTargetLink Product-Informationmazher_ecAún no hay calificaciones
- CANdb Manual ENDocumento32 páginasCANdb Manual ENYopi SopyanAún no hay calificaciones
- MICROSAR ProductInformation enDocumento92 páginasMICROSAR ProductInformation ensrikanthboddunaAún no hay calificaciones
- Simulink-Based Codesign and CosimulationDocumento31 páginasSimulink-Based Codesign and CosimulationTatiano BrolloAún no hay calificaciones
- NCP4205 DDocumento43 páginasNCP4205 DDiamantes Eletrônicos100% (1)
- Engine Control Failure Test Using HILS - Aisar RomasDocumento19 páginasEngine Control Failure Test Using HILS - Aisar RomasAisar Labibi Romas100% (1)
- Unit 4 SystemDesk 4Documento10 páginasUnit 4 SystemDesk 4Farwa ZahidAún no hay calificaciones
- Full Text 02Documento124 páginasFull Text 02AnoopAún no hay calificaciones
- Design Process Hardware Autosar: Present Problems The Autosar StandardDocumento3 páginasDesign Process Hardware Autosar: Present Problems The Autosar StandardJnsk SrinuAún no hay calificaciones
- Dspace-Paper Hil Overview Waeltermann e 160405Documento14 páginasDspace-Paper Hil Overview Waeltermann e 160405Reina castilloAún no hay calificaciones
- AUTOSAR LayeredSoftwareArchitectureDocumento46 páginasAUTOSAR LayeredSoftwareArchitectureGiridharAún no hay calificaciones
- Hardware in The Loop Simulation For Hybrid Electric Vehicles dSPACE - SAE - 0901 0198Documento8 páginasHardware in The Loop Simulation For Hybrid Electric Vehicles dSPACE - SAE - 0901 0198nrayamAún no hay calificaciones
- Basic Introduction On Matlab: A Textbook ofDocumento17 páginasBasic Introduction On Matlab: A Textbook ofmeenaAún no hay calificaciones
- Advanced Driver Assistance Systems (ADAS) Standard RequirementsDe EverandAdvanced Driver Assistance Systems (ADAS) Standard RequirementsAún no hay calificaciones
- 07.TAI Seminar WHAT Is FUNCTIONAL SAFETY BKK 25june2015 HandsoutDocumento33 páginas07.TAI Seminar WHAT Is FUNCTIONAL SAFETY BKK 25june2015 HandsoutsunithaAún no hay calificaciones
- Software Testing Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesDe EverandSoftware Testing Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesAún no hay calificaciones
- Hardware in The Loop SimulatorDocumento40 páginasHardware in The Loop SimulatortrojanbkAún no hay calificaciones
- Automated Vehicles A Complete Guide - 2020 EditionDe EverandAutomated Vehicles A Complete Guide - 2020 EditionAún no hay calificaciones
- Etas Inca Manual PDFDocumento2 páginasEtas Inca Manual PDFZacharyAún no hay calificaciones
- Dspace-Paper Hil Overview Waeltermann e 160405 PDFDocumento14 páginasDspace-Paper Hil Overview Waeltermann e 160405 PDFPranay VermaAún no hay calificaciones
- HIL Testing of ADAS FeaturesDocumento4 páginasHIL Testing of ADAS FeaturesInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- dSPACENews2006-3 AutomationDesk en Pn422Documento2 páginasdSPACENews2006-3 AutomationDesk en Pn422TYu4443Aún no hay calificaciones
- Autosar Pro ConsDocumento8 páginasAutosar Pro ConsYaseen YaseenAún no hay calificaciones
- Security and Safety in Embedded ApplicationsDocumento14 páginasSecurity and Safety in Embedded ApplicationsLinh Lê QuangAún no hay calificaciones
- Introduction To HIL Simulation - 2Documento12 páginasIntroduction To HIL Simulation - 2Kavuri Sai PradeepAún no hay calificaciones
- Functional Safety Management Aspects in Testing of Automotive Safety Concern SystemsDocumento4 páginasFunctional Safety Management Aspects in Testing of Automotive Safety Concern SystemssnehanagendraAún no hay calificaciones
- LabCar TutorialDocumento29 páginasLabCar TutorialHusain KanchwalaAún no hay calificaciones
- CarMaker WhitepaperDocumento9 páginasCarMaker WhitepapersegiropiAún no hay calificaciones
- Technologiebroschuere E-Drives 2013-07-130913 EbookDocumento60 páginasTechnologiebroschuere E-Drives 2013-07-130913 EbookSertug BaşarAún no hay calificaciones
- Autosar Brochure enDocumento4 páginasAutosar Brochure enMiha_BucurestiAún no hay calificaciones
- Diagnostic Communication Manager Module in AUTOSARDocumento7 páginasDiagnostic Communication Manager Module in AUTOSARShyam Bhat100% (1)
- Autosar PPTDocumento10 páginasAutosar PPTRahul WaliAún no hay calificaciones
- A New Rating Scale For Alzheimer's Disease: Regular ArticlesDocumento9 páginasA New Rating Scale For Alzheimer's Disease: Regular ArticlesVanina BertonaAún no hay calificaciones
- D2A1 1 2 ESL Virtual Hardware SetupDocumento15 páginasD2A1 1 2 ESL Virtual Hardware SetupRaj Shekhar ReddyAún no hay calificaciones
- T-Dplat, TATA ELXSI Diagnostics Platform: Prem Mohan Nair & Sreeraj ADocumento5 páginasT-Dplat, TATA ELXSI Diagnostics Platform: Prem Mohan Nair & Sreeraj Acoolman729Aún no hay calificaciones
- CAPL 3 CANNewsletter 201411 PressArticle enDocumento2 páginasCAPL 3 CANNewsletter 201411 PressArticle endaourdiopAún no hay calificaciones
- H Da Barth Functional Safety On MulticoreDocumento23 páginasH Da Barth Functional Safety On Multicores.b.v.seshagiri1407Aún no hay calificaciones
- DSPACE Catalog2016 E WebDocumento622 páginasDSPACE Catalog2016 E WebYonas GhiwotAún no hay calificaciones
- 4-14 - p18 - Tips-And-Tricks-For-The-Use-Of-Capl-Part 3 - Lobmeyer - MarktlDocumento4 páginas4-14 - p18 - Tips-And-Tricks-For-The-Use-Of-Capl-Part 3 - Lobmeyer - MarktlMohammad FaizanAún no hay calificaciones
- MISRA C-Some Key Rules To Make Embedded Systems Safer PDFDocumento3 páginasMISRA C-Some Key Rules To Make Embedded Systems Safer PDFLeiser HartbeckAún no hay calificaciones
- CANalyzer Workshops Overview FactSheet enDocumento2 páginasCANalyzer Workshops Overview FactSheet enPrasad GAún no hay calificaciones
- CANoe ProductInformation ENDocumento57 páginasCANoe ProductInformation ENpawan waghAún no hay calificaciones
- RTRT Setting For InstrumentationDocumento5 páginasRTRT Setting For Instrumentationvishal kumar sinhaAún no hay calificaciones
- Emaus Vector Canoe SlidesDocumento12 páginasEmaus Vector Canoe SlidesvlsishekarAún no hay calificaciones
- The TCP/IP ProtocolDocumento39 páginasThe TCP/IP ProtocolAsfikRahmanAún no hay calificaciones
- Vehicle Model For Dynamics Analysis and Hil SimulationDocumento8 páginasVehicle Model For Dynamics Analysis and Hil SimulationZoran FabekovicAún no hay calificaciones
- Job Opportunity Bootloader Specialist at Elektrobit Automotive GMBH Jobportal1Documento3 páginasJob Opportunity Bootloader Specialist at Elektrobit Automotive GMBH Jobportal1krishaAún no hay calificaciones
- Autosar Communication Stack Implementation With Flexray: Johan Elgered Jesper JanssonDocumento55 páginasAutosar Communication Stack Implementation With Flexray: Johan Elgered Jesper JanssonXuân ToànAún no hay calificaciones
- Stateflow: What Is Stateflow Examples Extended Uses Semantics and ProblemsDocumento36 páginasStateflow: What Is Stateflow Examples Extended Uses Semantics and ProblemsIsidoro BotchakAún no hay calificaciones
- CV Resume NaderJSA En03 PDFDocumento3 páginasCV Resume NaderJSA En03 PDFazitaggAún no hay calificaciones
- Embedded Hypervisor The Ultimate Step-By-Step GuideDe EverandEmbedded Hypervisor The Ultimate Step-By-Step GuideAún no hay calificaciones
- Impact of Stress and Emotional Reactions due to the Covid-19 Pandemic in IndiaDocumento6 páginasImpact of Stress and Emotional Reactions due to the Covid-19 Pandemic in IndiaInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Utilization of Waste Heat Emitted by the KilnDocumento2 páginasUtilization of Waste Heat Emitted by the KilnInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Detection and Counting of Fake Currency & Genuine Currency Using Image ProcessingDocumento6 páginasDetection and Counting of Fake Currency & Genuine Currency Using Image ProcessingInternational Journal of Innovative Science and Research Technology100% (9)
- Entrepreneurial Creative Thinking and Venture Performance: Reviewing the Influence of Psychomotor Education on the Profitability of Small and Medium Scale Firms in Port Harcourt MetropolisDocumento10 páginasEntrepreneurial Creative Thinking and Venture Performance: Reviewing the Influence of Psychomotor Education on the Profitability of Small and Medium Scale Firms in Port Harcourt MetropolisInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- An Overview of Lung CancerDocumento6 páginasAn Overview of Lung CancerInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Ambulance Booking SystemDocumento7 páginasAmbulance Booking SystemInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Designing Cost-Effective SMS based Irrigation System using GSM ModuleDocumento8 páginasDesigning Cost-Effective SMS based Irrigation System using GSM ModuleInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Unmasking Phishing Threats Through Cutting-Edge Machine LearningDocumento8 páginasUnmasking Phishing Threats Through Cutting-Edge Machine LearningInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Digital Finance-Fintech and it’s Impact on Financial Inclusion in IndiaDocumento10 páginasDigital Finance-Fintech and it’s Impact on Financial Inclusion in IndiaInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Auto Tix: Automated Bus Ticket SolutionDocumento5 páginasAuto Tix: Automated Bus Ticket SolutionInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Effect of Solid Waste Management on Socio-Economic Development of Urban Area: A Case of Kicukiro DistrictDocumento13 páginasEffect of Solid Waste Management on Socio-Economic Development of Urban Area: A Case of Kicukiro DistrictInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Computer Vision Gestures Recognition System Using Centralized Cloud ServerDocumento9 páginasComputer Vision Gestures Recognition System Using Centralized Cloud ServerInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Predictive Analytics for Motorcycle Theft Detection and RecoveryDocumento5 páginasPredictive Analytics for Motorcycle Theft Detection and RecoveryInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Study Assessing Viability of Installing 20kw Solar Power For The Electrical & Electronic Engineering Department Rufus Giwa Polytechnic OwoDocumento6 páginasStudy Assessing Viability of Installing 20kw Solar Power For The Electrical & Electronic Engineering Department Rufus Giwa Polytechnic OwoInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Forensic Advantages and Disadvantages of Raman Spectroscopy Methods in Various Banknotes Analysis and The Observed Discordant ResultsDocumento12 páginasForensic Advantages and Disadvantages of Raman Spectroscopy Methods in Various Banknotes Analysis and The Observed Discordant ResultsInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- An Industry That Capitalizes Off of Women's Insecurities?Documento8 páginasAn Industry That Capitalizes Off of Women's Insecurities?International Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Cyber Security Awareness and Educational Outcomes of Grade 4 LearnersDocumento33 páginasCyber Security Awareness and Educational Outcomes of Grade 4 LearnersInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Factors Influencing The Use of Improved Maize Seed and Participation in The Seed Demonstration Program by Smallholder Farmers in Kwali Area Council Abuja, NigeriaDocumento6 páginasFactors Influencing The Use of Improved Maize Seed and Participation in The Seed Demonstration Program by Smallholder Farmers in Kwali Area Council Abuja, NigeriaInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Parastomal Hernia: A Case Report, Repaired by Modified Laparascopic Sugarbaker TechniqueDocumento2 páginasParastomal Hernia: A Case Report, Repaired by Modified Laparascopic Sugarbaker TechniqueInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Blockchain Based Decentralized ApplicationDocumento7 páginasBlockchain Based Decentralized ApplicationInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Insights Into Nipah Virus: A Review of Epidemiology, Pathogenesis, and Therapeutic AdvancesDocumento8 páginasInsights Into Nipah Virus: A Review of Epidemiology, Pathogenesis, and Therapeutic AdvancesInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Implications of Adnexal Invasions in Primary Extramammary Paget's Disease: A Systematic ReviewDocumento6 páginasImplications of Adnexal Invasions in Primary Extramammary Paget's Disease: A Systematic ReviewInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Impact of Silver Nanoparticles Infused in Blood in A Stenosed Artery Under The Effect of Magnetic Field Imp. of Silver Nano. Inf. in Blood in A Sten. Art. Under The Eff. of Mag. FieldDocumento6 páginasImpact of Silver Nanoparticles Infused in Blood in A Stenosed Artery Under The Effect of Magnetic Field Imp. of Silver Nano. Inf. in Blood in A Sten. Art. Under The Eff. of Mag. FieldInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Smart Health Care SystemDocumento8 páginasSmart Health Care SystemInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Visual Water: An Integration of App and Web To Understand Chemical ElementsDocumento5 páginasVisual Water: An Integration of App and Web To Understand Chemical ElementsInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Air Quality Index Prediction Using Bi-LSTMDocumento8 páginasAir Quality Index Prediction Using Bi-LSTMInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Predict The Heart Attack Possibilities Using Machine LearningDocumento2 páginasPredict The Heart Attack Possibilities Using Machine LearningInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Compact and Wearable Ventilator System For Enhanced Patient CareDocumento4 páginasCompact and Wearable Ventilator System For Enhanced Patient CareInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Smart Cities: Boosting Economic Growth Through Innovation and EfficiencyDocumento19 páginasSmart Cities: Boosting Economic Growth Through Innovation and EfficiencyInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Parkinson's Detection Using Voice Features and Spiral DrawingsDocumento5 páginasParkinson's Detection Using Voice Features and Spiral DrawingsInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Photovoltaic Water PumpDocumento94 páginasPhotovoltaic Water PumpDeGees Efosa AiguiAún no hay calificaciones
- Econder MicrochipDocumento12 páginasEconder MicrochipSandra MarkivAún no hay calificaciones
- ACS 6000 Brochure RevADocumento18 páginasACS 6000 Brochure RevABoudam BoudjemaAún no hay calificaciones
- Modulation Method For A Dual-Buck Inverter Which Minimizes Zero Crossing Distortion and Circulating CurrentDocumento6 páginasModulation Method For A Dual-Buck Inverter Which Minimizes Zero Crossing Distortion and Circulating CurrentPremier PublishersAún no hay calificaciones
- Technical Report of Building A Line Follower RobotDocumento6 páginasTechnical Report of Building A Line Follower RobotLuizAún no hay calificaciones
- PDFDocumento14 páginasPDFJesus SilvaAún no hay calificaciones
- Mn103sa5k Lsi User's ManualDocumento554 páginasMn103sa5k Lsi User's ManualvietthufetAún no hay calificaciones
- (Codientu - Org) - BD 9397Documento30 páginas(Codientu - Org) - BD 9397VươngAún no hay calificaciones
- BLDC Motor Control Using A Variable DC Link SixDocumento8 páginasBLDC Motor Control Using A Variable DC Link Sixsashank rawatAún no hay calificaciones
- ID Mobile 2 7 0 Global Guide r1Documento272 páginasID Mobile 2 7 0 Global Guide r1GiangDoAún no hay calificaciones
- LG Flatron Monitor Chlm73a w2241bfDocumento25 páginasLG Flatron Monitor Chlm73a w2241bfDariusz DARCIOAún no hay calificaciones
- A New Mathematical Model and Control of A Three-Phase AC-DC Voltage Source ConverterDocumento8 páginasA New Mathematical Model and Control of A Three-Phase AC-DC Voltage Source ConverterVenktesh MishraAún no hay calificaciones
- CD 00279018Documento25 páginasCD 00279018hsyntunaAún no hay calificaciones
- Service Manual Acer TravelMate 420 PDFDocumento140 páginasService Manual Acer TravelMate 420 PDFmohzgoAún no hay calificaciones
- Users Manual of RDC6332G Control SystemDocumento40 páginasUsers Manual of RDC6332G Control SystemMilan JovicAún no hay calificaciones
- AN BLDC Sensorless Control ENG MCUMON-0 PDFDocumento37 páginasAN BLDC Sensorless Control ENG MCUMON-0 PDFDoDuyBacAún no hay calificaciones
- Amali 2 - Charge ControllerDocumento15 páginasAmali 2 - Charge ControllerIkmal Haziq Bin TalibAún no hay calificaciones
- D D D D D D D D D D D D: TL284x, TL384x Current-Mode PWM ControllersDocumento12 páginasD D D D D D D D D D D D: TL284x, TL384x Current-Mode PWM ControllersSudheer KakaniAún no hay calificaciones
- Fault Detection and Fault-Tolerant Control of Interior Permanent-Magnet Motor Drive System For Electric VehicleDocumento6 páginasFault Detection and Fault-Tolerant Control of Interior Permanent-Magnet Motor Drive System For Electric VehicleAnurag MishraAún no hay calificaciones
- Datasheet - HK h8s2117r 4965249 PDFDocumento1024 páginasDatasheet - HK h8s2117r 4965249 PDFt8126Aún no hay calificaciones
- Integrado CR NovaDocumento20 páginasIntegrado CR NovaMarcelino MarcanoAún no hay calificaciones
- E L G - 1 5 0 - C: 105 150W Constant Current Mode LED DriverDocumento12 páginasE L G - 1 5 0 - C: 105 150W Constant Current Mode LED DriverchusnuhAún no hay calificaciones
- Dspic30F6010 Motor Control PWMDocumento34 páginasDspic30F6010 Motor Control PWMSourabh KhandelwalAún no hay calificaciones
- Keithley 6220 6221Documento5 páginasKeithley 6220 6221Miguel De Los Santos PavisicAún no hay calificaciones
- LECTURE - 6 (IOTPP) Faculty Copy RoughDocumento65 páginasLECTURE - 6 (IOTPP) Faculty Copy Roughayushkumarmaha patroAún no hay calificaciones
- Theremino HAL - V8.x Instructions: SystemDocumento35 páginasTheremino HAL - V8.x Instructions: SystemN TAún no hay calificaciones
- Chloride 80-NET: UPS CatalogueDocumento36 páginasChloride 80-NET: UPS CataloguesaidazzAún no hay calificaciones