También podría gustarte
- Distribución de ProbabilidadDocumento3 páginasDistribución de ProbabilidadArlet PachecoAún no hay calificaciones
- Eje 1 - Ecuaciones DiferencialesDocumento14 páginasEje 1 - Ecuaciones DiferencialesFabián RamirezAún no hay calificaciones
- SESION de APRENDIZAJE Polinomios - Operaciones NuevoDocumento12 páginasSESION de APRENDIZAJE Polinomios - Operaciones Nuevoroxahaidee79% (29)
- Metodos Numericos Aplicados A La Ingenieria - NievesDocumento20 páginasMetodos Numericos Aplicados A La Ingenieria - Nievesjonathan campoberdeAún no hay calificaciones
- Null 7 PDFDocumento1 páginaNull 7 PDFOswaldo GarciaAún no hay calificaciones
- Ecuaciones e InecuacionesDocumento149 páginasEcuaciones e InecuacionesShamitoAún no hay calificaciones
- Mate Básica - Sesión 3Documento14 páginasMate Básica - Sesión 3Rosa Mel CarpioAún no hay calificaciones
- 8U4Ecuacion Ordinaria de La Elipse Con Centro Fuera Del OrigenDocumento7 páginas8U4Ecuacion Ordinaria de La Elipse Con Centro Fuera Del OrigenMarisol Maldonado MossoAún no hay calificaciones
- Unefa Termino Programa Ciclo Basico de Ingenieria NocturnoDocumento25 páginasUnefa Termino Programa Ciclo Basico de Ingenieria NocturnoFranyer GuillenAún no hay calificaciones
- 2 3 Clasificacion de Las Matrices PDFDocumento4 páginas2 3 Clasificacion de Las Matrices PDFUri GrijalvaAún no hay calificaciones
- Distribuciones MatematicasDocumento25 páginasDistribuciones Matematicasantônio el próAún no hay calificaciones
- Iván López AlarcónDocumento52 páginasIván López AlarcónIvan LopezAún no hay calificaciones
- Análisis Matematico Cap5 La IntegraciónDocumento72 páginasAnálisis Matematico Cap5 La IntegraciónJulio Cesar RodriguezAún no hay calificaciones
- Guía - Tercer Parcial - Primavera 2017Documento3 páginasGuía - Tercer Parcial - Primavera 2017Luis Gerardo Moreno RiveraAún no hay calificaciones
- Actividad 3 Algebra LinealDocumento17 páginasActividad 3 Algebra Linealmanuela100% (1)
- Electrodinámica Notas de ClaseDocumento409 páginasElectrodinámica Notas de ClaseJuan CastilloAún no hay calificaciones
- Álgebra Lineal II: Joel Rubalcava GonzálezDocumento17 páginasÁlgebra Lineal II: Joel Rubalcava Gonzálezisanchez_174906Aún no hay calificaciones
- Historia Del Cálculo Integral - Sotelo - Cuervo - Línea Del Tiempo - ACT#3Documento2 páginasHistoria Del Cálculo Integral - Sotelo - Cuervo - Línea Del Tiempo - ACT#3Victor Enrique Sotelo CuervoAún no hay calificaciones
- Unidad 2 ProbabilidadesDocumento38 páginasUnidad 2 ProbabilidadesJorge AlarjaAún no hay calificaciones
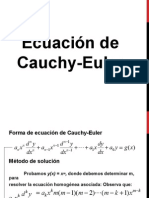
- Ecuación de Cauchy-EulerDocumento11 páginasEcuación de Cauchy-EulerJuan Luis Merlo100% (1)
- Caso Practico Estadistica II Unidad 2Documento2 páginasCaso Practico Estadistica II Unidad 2Dirección Oxi50 TunjaAún no hay calificaciones
- Clase9 MISDocumento15 páginasClase9 MISWero SosaAún no hay calificaciones
- Clase Magistral DibujoDocumento22 páginasClase Magistral DibujolucasergioAún no hay calificaciones
- Practicas de Alineal Con Matlab 2014Documento17 páginasPracticas de Alineal Con Matlab 2014Juan Uribe MarinAún no hay calificaciones
- 2-1A Valor AbsolutoDocumento11 páginas2-1A Valor AbsolutorarqqueAún no hay calificaciones
- Regla TrapecioDocumento13 páginasRegla TrapecioMelisaBarraCasasAún no hay calificaciones
- SISTEMA DE ECUACIONES LINEALES (Recuperado) v3Documento12 páginasSISTEMA DE ECUACIONES LINEALES (Recuperado) v3Juan GarcíaAún no hay calificaciones
- Evaluacion Segundo ParcialDocumento11 páginasEvaluacion Segundo ParcialRuben floresAún no hay calificaciones
- Descomposición Factorial de Polinomios Con Coeficientes RealesDocumento10 páginasDescomposición Factorial de Polinomios Con Coeficientes Realesjavier_358655467Aún no hay calificaciones