También podría gustarte
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (894)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2099)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (73)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- Table 6-Peak Solar Heat Gain Thru Ordinary GlassDocumento1 páginaTable 6-Peak Solar Heat Gain Thru Ordinary GlassADsuperman100% (1)
- SchmertmannDocumento13 páginasSchmertmannkabasy20150% (1)
- Nanometer Scale Multilayer Coatings Achieve Extreme HardnessDocumento12 páginasNanometer Scale Multilayer Coatings Achieve Extreme HardnessBojan PodgornikAún no hay calificaciones
- CH MCAT Elasiticity, Ohms Law, SolonidDocumento3 páginasCH MCAT Elasiticity, Ohms Law, SolonidhassanAún no hay calificaciones
- CH Mcat Elasiticity, Ohms Law, SolonidDocumento5 páginasCH Mcat Elasiticity, Ohms Law, SolonidhassanAún no hay calificaciones
- Indus Center OF Academics AND Learning: Marks 5x2 10 A)Documento1 páginaIndus Center OF Academics AND Learning: Marks 5x2 10 A)hassanAún no hay calificaciones
- Test 1 CH 2complete 2015Documento3 páginasTest 1 CH 2complete 2015hassanAún no hay calificaciones
- Modern PhysicsDocumento9 páginasModern PhysicshassanAún no hay calificaciones
- PHY4450 Chapter7 Part1Documento9 páginasPHY4450 Chapter7 Part1hassanAún no hay calificaciones
- 2nd Year Physics Chapter 12,13Documento7 páginas2nd Year Physics Chapter 12,13hassanAún no hay calificaciones
- Phy 11th CH 2 Complete 2017Documento1 páginaPhy 11th CH 2 Complete 2017hassanAún no hay calificaciones
- 1st Year Physics Chapter 1 To 3Documento4 páginas1st Year Physics Chapter 1 To 3hassanAún no hay calificaciones
- CH 3 Short and Problems 2014Documento1 páginaCH 3 Short and Problems 2014hassanAún no hay calificaciones
- CH 2 Torque and EquilibriumDocumento1 páginaCH 2 Torque and EquilibriumhassanAún no hay calificaciones
- CH 3 AlimranDocumento3 páginasCH 3 AlimranhassanAún no hay calificaciones
- CH 3 Compl NewDocumento2 páginasCH 3 Compl NewhassanAún no hay calificaciones
- Best Aims AcademyDocumento1 páginaBest Aims AcademyAman BhuttaAún no hay calificaciones
- Major Testing 2014-2015 Physics Part I Test 5 Chapter 5Documento4 páginasMajor Testing 2014-2015 Physics Part I Test 5 Chapter 5hassanAún no hay calificaciones
- Tameer-E-Nau Academy Taunsa Sharif Physics Ch#10 (Optical-Instruments) A. Select The Best OneDocumento2 páginasTameer-E-Nau Academy Taunsa Sharif Physics Ch#10 (Optical-Instruments) A. Select The Best OnehassanAún no hay calificaciones
- Major Testing 2014-2015 Physics Part I Test 1 Chapter 2Documento4 páginasMajor Testing 2014-2015 Physics Part I Test 1 Chapter 2hassanAún no hay calificaciones
- 634599660691024384Documento44 páginas634599660691024384hassanAún no hay calificaciones
- SM Ch02 Paul G. Hewitt 1eDocumento7 páginasSM Ch02 Paul G. Hewitt 1ehassanAún no hay calificaciones
- 2nd Year Physics MCQs Whole Book by Ali Raza PDFDocumento56 páginas2nd Year Physics MCQs Whole Book by Ali Raza PDFhassanAún no hay calificaciones
- Vectors and Equilibrium: Key ConceptsDocumento2 páginasVectors and Equilibrium: Key ConceptshassanAún no hay calificaciones
- Em NotesDocumento133 páginasEm NotesShashank MallepulaAún no hay calificaciones
- CH# 16+18 M.C.Q.SDocumento4 páginasCH# 16+18 M.C.Q.ShassanAún no hay calificaciones
- 1-Each Question Has Four Possible Answers. Tick The Correct AnswerDocumento4 páginas1-Each Question Has Four Possible Answers. Tick The Correct AnswerhassanAún no hay calificaciones
- M.C.Q.S: Physics-1 CH# 11 NameDocumento3 páginasM.C.Q.S: Physics-1 CH# 11 NamehassanAún no hay calificaciones
- CH 10 Mcat 2014Documento3 páginasCH 10 Mcat 2014Aman BhuttaAún no hay calificaciones
- SC Physics FormulasDocumento2 páginasSC Physics Formulashassan75% (4)
- Tamir-E-Nau Academy Taunsa Sharif Entry Test (CH# 10) NAME: - ROL: - SEC: - A. Select The Best OneDocumento2 páginasTamir-E-Nau Academy Taunsa Sharif Entry Test (CH# 10) NAME: - ROL: - SEC: - A. Select The Best OnehassanAún no hay calificaciones
- CH 4 McatDocumento4 páginasCH 4 McathassanAún no hay calificaciones
- Moisture and Total Solids AnalysisDocumento44 páginasMoisture and Total Solids AnalysisNicholas BoampongAún no hay calificaciones
- Fourier's Law Heat Transfer ExperimentDocumento7 páginasFourier's Law Heat Transfer ExperimentAman SinhaAún no hay calificaciones
- Mech4620 Group 12 Report PDFDocumento12 páginasMech4620 Group 12 Report PDFAaron Hoytash100% (1)
- Bunker DesignDocumento25 páginasBunker DesignswatkoolAún no hay calificaciones
- Math 2280 - Lecture 4: Separable Equations and Applications: Dylan Zwick Fall 2013Documento8 páginasMath 2280 - Lecture 4: Separable Equations and Applications: Dylan Zwick Fall 2013Kawsar MobinAún no hay calificaciones
- ANSYS FLUENT Population Balance Module ManualDocumento80 páginasANSYS FLUENT Population Balance Module ManualGokul PrabuAún no hay calificaciones
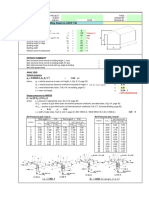
- Wind Analysis For Low-Rise Building, Based On ASCE 7-98Documento2 páginasWind Analysis For Low-Rise Building, Based On ASCE 7-98reynoldAún no hay calificaciones
- Summary and Applications of The New Fatigue Rules in Part 14 of Api 579-1/ASME FFS-1 AND WRC 550Documento11 páginasSummary and Applications of The New Fatigue Rules in Part 14 of Api 579-1/ASME FFS-1 AND WRC 550dddAún no hay calificaciones
- Light FundamentalsDocumento75 páginasLight FundamentalsErica QuirobAún no hay calificaciones
- Line-Scanning Laser Scattering System For Fast Defect Inspection of A Large Aperture SurfaceDocumento10 páginasLine-Scanning Laser Scattering System For Fast Defect Inspection of A Large Aperture SurfaceAyman IsmailAún no hay calificaciones
- ADMmodule - STEM - GP12N-Id-28Documento24 páginasADMmodule - STEM - GP12N-Id-28Jersa Mae MaravillaAún no hay calificaciones
- Design and Fabrication of Hand Water Pump Operated by A PendulumDocumento6 páginasDesign and Fabrication of Hand Water Pump Operated by A PendulumAyyanrajAún no hay calificaciones
- Universiti Teknologi Mara Odl Exam 1: Confidential EM/ JUNE 2020/MEC551Documento6 páginasUniversiti Teknologi Mara Odl Exam 1: Confidential EM/ JUNE 2020/MEC551Mohd HaniffAún no hay calificaciones
- Moments, Levers and Gears 3 QPDocumento19 páginasMoments, Levers and Gears 3 QPdeepheat_008Aún no hay calificaciones
- CK Osborne Reynolds PDFDocumento4 páginasCK Osborne Reynolds PDFChaminduKrishanRupasingheAún no hay calificaciones
- Beams - Determinate: Using Area Moment MethodDocumento16 páginasBeams - Determinate: Using Area Moment MethodOmen JettAún no hay calificaciones
- Physics Investigatory ProjectDocumento18 páginasPhysics Investigatory ProjectRΛJIBUL ISLΛMAún no hay calificaciones
- Physics General (PHSG) Class Notes Department of Physics Rishi Bankim Chandra Evening CollegeDocumento3 páginasPhysics General (PHSG) Class Notes Department of Physics Rishi Bankim Chandra Evening CollegeFavourite MoviesAún no hay calificaciones
- Models - Mph.heat Transient AxiDocumento6 páginasModels - Mph.heat Transient AxiAnonymous sAmJfcVAún no hay calificaciones
- Term 1 - Physics Part 2Documento11 páginasTerm 1 - Physics Part 2Gaming TriadAún no hay calificaciones
- Section A: Multiple Choice Questions (20 Marks)Documento4 páginasSection A: Multiple Choice Questions (20 Marks)saed cabdiAún no hay calificaciones
- Catalogo Raycap Baja TensionDocumento250 páginasCatalogo Raycap Baja TensionDomingo RuizAún no hay calificaciones
- EE207 Problem Set 1Documento2 páginasEE207 Problem Set 1Rishabh AgarwalAún no hay calificaciones
- Pemfc Modeling Mvkf25Documento37 páginasPemfc Modeling Mvkf25Xiaoqiang zhangAún no hay calificaciones
- Grounding - Industry Experiences - 2013Documento292 páginasGrounding - Industry Experiences - 2013Minhthien NguyenAún no hay calificaciones
- L12-Design of Pelton TurbineDocumento15 páginasL12-Design of Pelton TurbineRohan GuptaAún no hay calificaciones
- Construction and Trial Experiment of A Small Size Thermo-Acoustic Refrigeration SystemDocumento6 páginasConstruction and Trial Experiment of A Small Size Thermo-Acoustic Refrigeration SystemijeteeditorAún no hay calificaciones