También podría gustarte
- E310 - ELECTRICAL ROOF PLAN LIGHTING Rev.17Documento1 páginaE310 - ELECTRICAL ROOF PLAN LIGHTING Rev.17Ricardo Mayorga ParedesAún no hay calificaciones
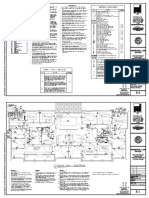
- 2-18-2020 - GAC MSC - Acworth - Add2 Full SetDocumento21 páginas2-18-2020 - GAC MSC - Acworth - Add2 Full SetRicardo Mayorga ParedesAún no hay calificaciones
- E403 - ELECTRICAL FLOOR PLAN PARKING LEVEL 1 POWER Rev.16Documento1 páginaE403 - ELECTRICAL FLOOR PLAN PARKING LEVEL 1 POWER Rev.16Ricardo Mayorga ParedesAún no hay calificaciones
- Ats 400Documento40 páginasAts 400Ricardo Mayorga Paredes100% (1)
- Existing LEC2001 ASBUILTDocumento1 páginaExisting LEC2001 ASBUILTRicardo Mayorga ParedesAún no hay calificaciones
- Engineering For Kids Ebrochure 2020 Update - OriginalDocumento26 páginasEngineering For Kids Ebrochure 2020 Update - OriginalRicardo Mayorga ParedesAún no hay calificaciones
- The Ultimate Guide: To Learning Language at Home, at Your PaceDocumento52 páginasThe Ultimate Guide: To Learning Language at Home, at Your PaceElena DAún no hay calificaciones
- 2-18-2020 - GAC MSC - Acworth - Add2 Full SetDocumento21 páginas2-18-2020 - GAC MSC - Acworth - Add2 Full SetRicardo Mayorga ParedesAún no hay calificaciones
- Technology: Tim AndersonDocumento6 páginasTechnology: Tim AndersonRicardo Mayorga ParedesAún no hay calificaciones
- Keval Investments, Inc.: Consulting EngineersDocumento1 páginaKeval Investments, Inc.: Consulting EngineersRicardo Mayorga ParedesAún no hay calificaciones
- ElectricalDocumento6 páginasElectricalRicardo Mayorga ParedesAún no hay calificaciones
- Weinstein Law Office: RJD Architect, LLCDocumento6 páginasWeinstein Law Office: RJD Architect, LLCRicardo Mayorga ParedesAún no hay calificaciones
- N01 15 23Documento9 páginasN01 15 23Ricardo Mayorga ParedesAún no hay calificaciones
- Glowstick: A Go-GoDocumento4 páginasGlowstick: A Go-GoRicardo Mayorga ParedesAún no hay calificaciones
- Assistive IntelligentDocumento4 páginasAssistive IntelligentRicardo Mayorga ParedesAún no hay calificaciones
- Los Trabajos Tutorizados Como Método de Aprendizaje A Través de La Investigación y La Aplicación de Las Nuevas TecnologíasDocumento5 páginasLos Trabajos Tutorizados Como Método de Aprendizaje A Través de La Investigación y La Aplicación de Las Nuevas TecnologíasRicardo Mayorga ParedesAún no hay calificaciones
- IEEEAwards 2016Documento42 páginasIEEEAwards 2016Ricardo Mayorga ParedesAún no hay calificaciones
- N01 12 14Documento3 páginasN01 12 14Ricardo Mayorga ParedesAún no hay calificaciones
- NoticIEEEro 94Documento29 páginasNoticIEEEro 94Ricardo Mayorga ParedesAún no hay calificaciones
- 1Documento4 páginas1Ricardo Mayorga ParedesAún no hay calificaciones
- 07243399Documento5 páginas07243399Ricardo Mayorga ParedesAún no hay calificaciones
- S0924424711006091 - 1 s2.0 S0924424711006091 MainDocumento9 páginasS0924424711006091 - 1 s2.0 S0924424711006091 MainRicardo Mayorga ParedesAún no hay calificaciones
- NoticIEEEro 94Documento29 páginasNoticIEEEro 94Ricardo Mayorga ParedesAún no hay calificaciones
- Cloud Computing Opportunities and ChallengesDocumento3 páginasCloud Computing Opportunities and ChallengesRicardo Mayorga ParedesAún no hay calificaciones
- NoticIEEEro 93Documento43 páginasNoticIEEEro 93Ricardo Mayorga ParedesAún no hay calificaciones
- 07243395Documento5 páginas07243395Ricardo Mayorga ParedesAún no hay calificaciones
- IEEEAwards 2016Documento42 páginasIEEEAwards 2016Ricardo Mayorga ParedesAún no hay calificaciones
- OctDec201503 PDFDocumento6 páginasOctDec201503 PDFRicardo Mayorga ParedesAún no hay calificaciones
- Home Automation in The Cloud With The Esp8266 and Adafruit IoDocumento16 páginasHome Automation in The Cloud With The Esp8266 and Adafruit IoBhaumik VaidyaAún no hay calificaciones
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (121)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2103)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- Ultimate Carding Power From The Carding SpecialistsDocumento11 páginasUltimate Carding Power From The Carding SpecialistsKhuram Shah Engr0% (1)
- Huck C50LDocumento4 páginasHuck C50LchristianAún no hay calificaciones
- Prince2 1Documento88 páginasPrince2 1545137Aún no hay calificaciones
- Tropical Paper1Documento9 páginasTropical Paper1Danica May TorresAún no hay calificaciones
- SOLDIERDocumento2 páginasSOLDIERYasserMohsenAún no hay calificaciones
- Rachmada Wishnu Putra Adinova - MILLINGDocumento20 páginasRachmada Wishnu Putra Adinova - MILLINGRachmada WishnuAún no hay calificaciones
- Api 3171 IomDocumento66 páginasApi 3171 IomAdemola Olakunle AjayiAún no hay calificaciones
- Shacman ManualDocumento318 páginasShacman ManualNay Soe100% (9)
- Bromma OhfDocumento30 páginasBromma OhfMohd Rizalman100% (2)
- Laboratory Test EquipmentDocumento3 páginasLaboratory Test EquipmentRaqibul HasanAún no hay calificaciones
- Valve Solutions For Pipelines PDFDocumento8 páginasValve Solutions For Pipelines PDFCristhian Niño MartinezAún no hay calificaciones
- Distributed Control SystemDocumento10 páginasDistributed Control SystemRavenShieldX100% (1)
- Production Part ApprovalDocumento3 páginasProduction Part Approvalvidya410gmailcomAún no hay calificaciones
- 700 MW Plant DescripionDocumento6 páginas700 MW Plant Descripionsathesh100% (1)
- Alstom Tamuin MainDataDocumento2 páginasAlstom Tamuin MainDatarestradacarsolioAún no hay calificaciones
- TechnologiesDocumento27 páginasTechnologiesJulya JulyAún no hay calificaciones
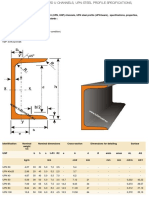
- UPN (UNP) European Standard U Channels, UPN Steel Profile Specifications, DimenDocumento2 páginasUPN (UNP) European Standard U Channels, UPN Steel Profile Specifications, DimenAdnan Atif100% (1)
- Metal Plus (Model 1412) : Written By: Brook DrummDocumento30 páginasMetal Plus (Model 1412) : Written By: Brook DrummEmmanuel LeggeriAún no hay calificaciones
- Chiller YorkDocumento44 páginasChiller YorkMJZE100% (1)
- Form 1 - GEOMATE Journal TemplateDocumento3 páginasForm 1 - GEOMATE Journal TemplateMinangkabau BreederAún no hay calificaciones
- Compressor Rigsafe Booster 2000 PSI Data SheetDocumento2 páginasCompressor Rigsafe Booster 2000 PSI Data SheetNotfound ByuAún no hay calificaciones
- Rosnita Binti A Talib PDFDocumento289 páginasRosnita Binti A Talib PDFvenkatAún no hay calificaciones
- Proceedings TIL2014Documento204 páginasProceedings TIL2014GogyAún no hay calificaciones
- NSCP 2001 PDFDocumento434 páginasNSCP 2001 PDFrhon81% (31)
- DYNA4 Car ProfessionalDocumento4 páginasDYNA4 Car ProfessionalRasoolKhadibiAún no hay calificaciones
- CB Concert Katalog en ScreenDocumento53 páginasCB Concert Katalog en ScreenPeter DavidsonAún no hay calificaciones
- Designed in Spain: Space Saving FurnitureDocumento27 páginasDesigned in Spain: Space Saving FurniturelineshAún no hay calificaciones
- Z Wave Vision Wireless Siren Battery Powered Gen5 ManualDocumento3 páginasZ Wave Vision Wireless Siren Battery Powered Gen5 ManualsfdsfdsAún no hay calificaciones
- MM Conversion ChartDocumento3 páginasMM Conversion Chartkm1790Aún no hay calificaciones
- DNV 2 7 3 2006 PDFDocumento22 páginasDNV 2 7 3 2006 PDFFathiah Olpah SiaraAún no hay calificaciones