También podría gustarte
- Filière D'Ingénieurs: Systèmes Intelligents Module: Théorie de L'Information Codage Source, Canal Vidéo Et Parole Exercices de TdsDocumento6 páginasFilière D'Ingénieurs: Systèmes Intelligents Module: Théorie de L'Information Codage Source, Canal Vidéo Et Parole Exercices de TdsHamza MhalAún no hay calificaciones
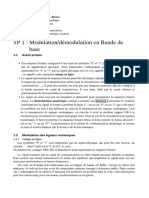
- TP1-Modulationdémodulation en Bande de Base PDFDocumento11 páginasTP1-Modulationdémodulation en Bande de Base PDFSeloum MldAún no hay calificaciones
- Exo 1Documento9 páginasExo 1larbiAún no hay calificaciones
- Compte Rendu TP 01Documento18 páginasCompte Rendu TP 01Sadouki AlaeAún no hay calificaciones
- Cours Codes Convolutifs IC5 - 2023-2024Documento36 páginasCours Codes Convolutifs IC5 - 2023-2024Abby AbbyAún no hay calificaciones
- Examen VHDL Janv 2016 - CorrDocumento8 páginasExamen VHDL Janv 2016 - CorrHadi Ben SaïdAún no hay calificaciones
- Fiche TP Codage MasterI TLC RTSTDocumento11 páginasFiche TP Codage MasterI TLC RTSTmaissaAún no hay calificaciones
- TP01Documento8 páginasTP01Me ReAún no hay calificaciones
- Codage ManchesterDocumento18 páginasCodage ManchesterRACHID100% (2)
- Rapport CodagesDocumento24 páginasRapport CodagesLou LoulouAún no hay calificaciones
- TP02 Licence 1819Documento4 páginasTP02 Licence 1819maîgaAún no hay calificaciones
- Rapport VHDL TelecommandeDocumento12 páginasRapport VHDL TelecommandeR.s. FélixAún no hay calificaciones
- TP 1Documento9 páginasTP 1Ygb RedaAún no hay calificaciones
- Code CorrecteurDocumento31 páginasCode CorrecteurAbdouAún no hay calificaciones
- Traitement Num Erique Du Signal Travaux Pratiques (7h) Synth'ese, Analyse Et Filtrage D'un Signal Audio Num EriqueDocumento9 páginasTraitement Num Erique Du Signal Travaux Pratiques (7h) Synth'ese, Analyse Et Filtrage D'un Signal Audio Num Eriquekheira djelloulAún no hay calificaciones
- Clavier MatricielDocumento18 páginasClavier Matricielhaithemo100% (3)
- Universite Molay Ismail Faculte PolydiscDocumento14 páginasUniversite Molay Ismail Faculte PolydiscTayeb BELKHIRAún no hay calificaciones
- TPDocumento9 páginasTPyousfi.najah6085100% (1)
- Projet Codage FinalDocumento18 páginasProjet Codage FinalOussamaAún no hay calificaciones
- Cours2 3Documento8 páginasCours2 3Marieme LoAún no hay calificaciones
- Rapport de Projet Alarme FPGA VHDLDocumento17 páginasRapport de Projet Alarme FPGA VHDLYOUNES MASHATEAún no hay calificaciones
- Examen 1 ComNum 09-10 2Documento4 páginasExamen 1 ComNum 09-10 2Hamid BOUASSAMAún no hay calificaciones
- Série02 CCDocumento2 páginasSérie02 CCÐäñ ÑiëłøAún no hay calificaciones
- Codage TP1Documento9 páginasCodage TP1MED ElAún no hay calificaciones
- Travaux Pratique 1 RLIDocumento9 páginasTravaux Pratique 1 RLIKader AbdoulAún no hay calificaciones
- Code Correcteur D'erreurDocumento25 páginasCode Correcteur D'erreurpicassomedia100% (1)
- Exercice 0:: J 2 1 I I JDocumento5 páginasExercice 0:: J 2 1 I I JDadi Mohamed BéchirAún no hay calificaciones
- Analyses VH DDocumento10 páginasAnalyses VH DMustapha El IdrissiAún no hay calificaciones
- Sujet Projet 2021Documento3 páginasSujet Projet 2021Abdèll AchAún no hay calificaciones
- Algo2 Exam Sol 2021Documento9 páginasAlgo2 Exam Sol 2021Mimo0% (1)
- Eléments-De-Correction Eval Type CodesignDocumento4 páginasEléments-De-Correction Eval Type CodesignhurnelAún no hay calificaciones
- 2 Cours TVN CS 2 PDFDocumento57 páginas2 Cours TVN CS 2 PDFMahfoud le KingAún no hay calificaciones
- Exam Pratiques PDFDocumento18 páginasExam Pratiques PDFAbdeljebbar Ahmed AmineAún no hay calificaciones
- Devoir de Synthèse #2: Sections: Niveau: Matière: Prof.: Date: DuréeDocumento3 páginasDevoir de Synthèse #2: Sections: Niveau: Matière: Prof.: Date: DuréeHm WalidAún no hay calificaciones
- TP EchantillonnageDocumento4 páginasTP EchantillonnageKamel SahraouiAún no hay calificaciones
- Id 10726Documento6 páginasId 10726Wided HechkelAún no hay calificaciones
- 2010 11.CE - Correction.comnumDocumento4 páginas2010 11.CE - Correction.comnumYoussef Ennaciri0% (1)
- Microcontrolleurs TP2Documento9 páginasMicrocontrolleurs TP2Coop ZkuberveitAún no hay calificaciones
- Sujet TD04Documento2 páginasSujet TD04Zakaria BenlafqihAún no hay calificaciones
- DecodeurDocumento12 páginasDecodeurREDA SAADALLAHAún no hay calificaciones
- Emetteur Recepteur Manchester PDFDocumento14 páginasEmetteur Recepteur Manchester PDFZinou LenouarAún no hay calificaciones
- TP UART Arduino Proteus InitDocumento5 páginasTP UART Arduino Proteus Initjessy.masseAún no hay calificaciones
- Inf3500 200702 Intra SolutionDocumento5 páginasInf3500 200702 Intra SolutionSlim SghirAún no hay calificaciones
- Rapport Examples VHDLDocumento30 páginasRapport Examples VHDLYacineAún no hay calificaciones
- Travaux Pratique 01-Converti235Documento8 páginasTravaux Pratique 01-Converti235Oualid IslemAún no hay calificaciones
- ALGO Diapo1Documento35 páginasALGO Diapo1Fars AmineAún no hay calificaciones
- ISTDI - TD Théorie de L'info Et Du Codage - RevDocumento4 páginasISTDI - TD Théorie de L'info Et Du Codage - Revstanis kamdoumAún no hay calificaciones
- TP1Documento5 páginasTP1Oumayma AmiriAún no hay calificaciones
- Livre AlgorithmesDocumento138 páginasLivre AlgorithmesBaalla Hassan100% (1)
- TP OssDocumento5 páginasTP OssJosephine NoroAún no hay calificaciones
- Chapitre 17 CorrigeDocumento12 páginasChapitre 17 CorrigeABDOULHAMID MAZIGHAún no hay calificaciones
- Émetteur-Récepteur ManchesterDocumento14 páginasÉmetteur-Récepteur ManchesterSiham MajidAún no hay calificaciones
- MatLab & Simulink Trabaux PratiqueDocumento22 páginasMatLab & Simulink Trabaux PratiqueAbdelilah Charboub100% (2)
- Dokumen - Tips - TP 1 Transmission de Donne Inisiallisation A Simulink MatlabDocumento15 páginasDokumen - Tips - TP 1 Transmission de Donne Inisiallisation A Simulink MatlabParfumerie Actu'ElleAún no hay calificaciones
- Exercice de Synthèse: Etat0 Plus 1'Documento2 páginasExercice de Synthèse: Etat0 Plus 1'Boudour BarkiaAún no hay calificaciones
- 01 Langage A ContactsDocumento32 páginas01 Langage A Contactsboss.12812Aún no hay calificaciones
- TD N3 VHDLDocumento20 páginasTD N3 VHDLHanane AIT SAIDAún no hay calificaciones
- L'expression "Historico-Critique " PDFDocumento5 páginasL'expression "Historico-Critique " PDFJean-Paul Yves Le GoffAún no hay calificaciones
- 2 Observation Médicale Et Démarche en Médecine InterneDocumento60 páginas2 Observation Médicale Et Démarche en Médecine InterneDalmat LambertAún no hay calificaciones
- Politique Linguistique Et Toponymie Quel PDFDocumento21 páginasPolitique Linguistique Et Toponymie Quel PDFMassa TebaniAún no hay calificaciones
- Tous Les Calculs de Bac Pro Commerce PDFDocumento3 páginasTous Les Calculs de Bac Pro Commerce PDFHiSo DaanAún no hay calificaciones
- Histoire Du MedicamentDocumento10 páginasHistoire Du MedicamentEtienneAún no hay calificaciones
- Ch04 TP Salinite Titrage ConductimetriqueDocumento1 páginaCh04 TP Salinite Titrage Conductimetriquesylvain zuchiattiAún no hay calificaciones
- 15ème Dimanche TOB 2021Documento2 páginas15ème Dimanche TOB 2021christian parfait yanda belingaAún no hay calificaciones
- Guide Des Medicaments Rembourses DciDocumento129 páginasGuide Des Medicaments Rembourses DciAsmaa TznAún no hay calificaciones
- Rapport CSPLA - Données Et Contenus Numériques PDFDocumento131 páginasRapport CSPLA - Données Et Contenus Numériques PDFseti2016Aún no hay calificaciones
- TP 4 31 JanvierDocumento5 páginasTP 4 31 JanvierNarimen BoudilmiAún no hay calificaciones
- DS Dossier Gratuit HypertensionDocumento11 páginasDS Dossier Gratuit HypertensionFrancoisAún no hay calificaciones
- Master I - Gestion de Projets - Seance 1B PDFDocumento27 páginasMaster I - Gestion de Projets - Seance 1B PDFSarah ManouAún no hay calificaciones
- Chemins de Traverse Essais de Sociologie (Khatibi)Documento478 páginasChemins de Traverse Essais de Sociologie (Khatibi)faiz75% (4)
- Guide Sante Janv 2019Documento52 páginasGuide Sante Janv 2019Thomas AbadAún no hay calificaciones
- LMU - Problèmes Macroéconomiques - TD 1 - Corrigé - Chapitre 1 PDFDocumento12 páginasLMU - Problèmes Macroéconomiques - TD 1 - Corrigé - Chapitre 1 PDFAndy RAKOTOARISONAún no hay calificaciones
- NAT-1reG D5SpectroscopieIR PDFDocumento10 páginasNAT-1reG D5SpectroscopieIR PDFYõůsřà LõlaAún no hay calificaciones
- Convexite CoursDocumento3 páginasConvexite CoursCédric VergnerieAún no hay calificaciones
- Physics Paper 2 HL SpanishDocumento25 páginasPhysics Paper 2 HL SpanishLOPEZ MELENDEZ RODRIGO ANTONIOAún no hay calificaciones
- BVM.303. GaiaDocumento38 páginasBVM.303. GaiaadwawdAún no hay calificaciones
- Cours Milieux Poreux Et DispersésDocumento23 páginasCours Milieux Poreux Et DispersésAbdallah abdellaoui91% (11)
- Les Embrayages1Documento14 páginasLes Embrayages1Ghayth BouzayaniAún no hay calificaciones
- TD Stat Inférentielle - Loi NormaleDocumento2 páginasTD Stat Inférentielle - Loi NormaleSalma SabwatAún no hay calificaciones
- Ts 2Documento9 páginasTs 2Ayman AssilaAún no hay calificaciones
- La Fin Du MalDocumento120 páginasLa Fin Du MalBruno Sauniere100% (2)
- La Logistique Des RetoursDocumento8 páginasLa Logistique Des RetoursAbdo EłAún no hay calificaciones
- La Méthode Des 5SDocumento2 páginasLa Méthode Des 5SMotassi AlexAún no hay calificaciones
- Corrigé de L'exercice N° 1: Calcul Du Potentiel D'équilibre D'un IonDocumento10 páginasCorrigé de L'exercice N° 1: Calcul Du Potentiel D'équilibre D'un IonSabo100% (1)
- Ba00444cfr 2721Documento176 páginasBa00444cfr 2721hassanAún no hay calificaciones
- De Moïse À Hiram: Bernard MarquierDocumento20 páginasDe Moïse À Hiram: Bernard MarquierDanMarniaAún no hay calificaciones
- Effet Thérapeutique D'ailDocumento252 páginasEffet Thérapeutique D'ailtasnime hanineAún no hay calificaciones