También podría gustarte
- Screencapture Coursera Org Learn dsp4 Exam Lx1yy Homework For Module 4 1 View Attempt 2023 04 03 10 - 38 - 46Documento6 páginasScreencapture Coursera Org Learn dsp4 Exam Lx1yy Homework For Module 4 1 View Attempt 2023 04 03 10 - 38 - 46Insani Abdi BangsaAún no hay calificaciones
- Bioelectromagnetism. 16. Vectorcardiographic Lead Systems: January 1995Documento21 páginasBioelectromagnetism. 16. Vectorcardiographic Lead Systems: January 1995Insani Abdi BangsaAún no hay calificaciones
- Exam Jan 2014Documento3 páginasExam Jan 2014Insani Abdi BangsaAún no hay calificaciones
- PV Technology and Systems: Bianco Zandbergen Aditya Chaudhary Insani Abdi Bangsa Raunak KulkarniDocumento33 páginasPV Technology and Systems: Bianco Zandbergen Aditya Chaudhary Insani Abdi Bangsa Raunak KulkarniInsani Abdi BangsaAún no hay calificaciones
- Catalog 13 14 PDFDocumento719 páginasCatalog 13 14 PDFInsani Abdi BangsaAún no hay calificaciones
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (121)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2104)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- Active Suspension Using SkyhookDocumento14 páginasActive Suspension Using SkyhookSandor CleganeAún no hay calificaciones
- The Context Switch in FreeRTOS On A Cortex MDocumento13 páginasThe Context Switch in FreeRTOS On A Cortex MKristof MulierAún no hay calificaciones
- Fallacy - Philosophy Grade 11Documento17 páginasFallacy - Philosophy Grade 11leila vesagasAún no hay calificaciones
- flowswitchHFS25 PDFDocumento2 páginasflowswitchHFS25 PDFlajosmolAún no hay calificaciones
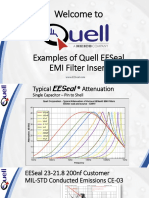
- Examples of Quell's EESeal EMI Filter Inserts - MIL-STD-461 Test ResultsDocumento15 páginasExamples of Quell's EESeal EMI Filter Inserts - MIL-STD-461 Test ResultsXto PeregrinAún no hay calificaciones
- Ethics and Voluntary Act For HardDocumento4 páginasEthics and Voluntary Act For HardSarah Del Mundo CagangAún no hay calificaciones
- Distillation of A Mixture of N-Hexane and N-Heptane-lab - Handout - Experiment - 7Documento12 páginasDistillation of A Mixture of N-Hexane and N-Heptane-lab - Handout - Experiment - 7megacobAún no hay calificaciones
- Full Download Strategic Management Text and Cases 9th Edition Dess Test BankDocumento35 páginasFull Download Strategic Management Text and Cases 9th Edition Dess Test Banksaumvirgen2375812100% (28)
- Nlaa Siam.2010Documento1 páginaNlaa Siam.2010YesicaAquinoAún no hay calificaciones
- Course 5 - Cooperative Principle and ImplicatureDocumento6 páginasCourse 5 - Cooperative Principle and ImplicatureAnca Ionela ManoleAún no hay calificaciones
- Answers To Case Application Ch1-8Documento13 páginasAnswers To Case Application Ch1-8553601750% (2)
- PDF Superior BBADocumento7 páginasPDF Superior BBAabubakurAún no hay calificaciones
- Public Relations vs. Propaganda: Alexandru BASTIANDocumento6 páginasPublic Relations vs. Propaganda: Alexandru BASTIANFatima AshrafAún no hay calificaciones
- Wessel 1984. The Agricultural Foundations of CivilizationDocumento4 páginasWessel 1984. The Agricultural Foundations of CivilizationAndres Maria-ramirezAún no hay calificaciones
- IJCM Vol 23 Issue 8Documento83 páginasIJCM Vol 23 Issue 8Daniel PratamaAún no hay calificaciones
- Factors Influencing OrganisationalDocumento14 páginasFactors Influencing OrganisationalratnaAún no hay calificaciones
- Name: Course/year:: Micro Asia College of Science and TechnologyDocumento3 páginasName: Course/year:: Micro Asia College of Science and TechnologyTrisTan DolojanAún no hay calificaciones
- MD Nastran R3 - Explicit Nonlinear SOL 700 User's Guide PDFDocumento602 páginasMD Nastran R3 - Explicit Nonlinear SOL 700 User's Guide PDFpezz07Aún no hay calificaciones
- Difficult Doctrine of The Love of GodDocumento93 páginasDifficult Doctrine of The Love of GodRocio Pireyek100% (8)
- Lecture 9 - Symmetry & Concentricity, Expanded Position TolerancingDocumento19 páginasLecture 9 - Symmetry & Concentricity, Expanded Position Tolerancingג'ון ירוקAún no hay calificaciones
- History of AAMI BIT StoryDocumento11 páginasHistory of AAMI BIT StoryManojAún no hay calificaciones
- Java Programming 9Th Edition Farrell Solutions Manual Full Chapter PDFDocumento32 páginasJava Programming 9Th Edition Farrell Solutions Manual Full Chapter PDFaletheasophroniahae100% (9)
- Bonus, Alexander Evan - The Metronomic Performance Practice - A History of Rhythm, Metronomes, and The Mechanization of MusicalityDocumento597 páginasBonus, Alexander Evan - The Metronomic Performance Practice - A History of Rhythm, Metronomes, and The Mechanization of MusicalityNoMoPoMo576100% (2)
- ROBT308Lecture22Spring16 PDFDocumento52 páginasROBT308Lecture22Spring16 PDFrightheartedAún no hay calificaciones
- Midas Manual PDFDocumento49 páginasMidas Manual PDFNishad Kulkarni100% (1)
- EC9560 Data Mining: Lab 02: Classification and Prediction Using WEKADocumento5 páginasEC9560 Data Mining: Lab 02: Classification and Prediction Using WEKAkeethanAún no hay calificaciones
- Lesson Plan GagneDocumento2 páginasLesson Plan Gagnechiew gin siongAún no hay calificaciones
- Maximum Remaining - CodeChefDocumento3 páginasMaximum Remaining - CodeChefShubhi SinghAún no hay calificaciones
- Listening Was Defined by Julian Treasure A2Documento2 páginasListening Was Defined by Julian Treasure A2kim olimbaAún no hay calificaciones
- Stating The Obvious PDFDocumento10 páginasStating The Obvious PDFGlenn E. DicenAún no hay calificaciones