También podría gustarte
- Time-Current Coordination ExampleDocumento6 páginasTime-Current Coordination ExamplekishansaiAún no hay calificaciones
- Tariff, Power Factor and Power Factor ImprovementDocumento12 páginasTariff, Power Factor and Power Factor ImprovementnurliyanaAún no hay calificaciones
- Applied Analysis of The Navier-Stokes EquationsDocumento231 páginasApplied Analysis of The Navier-Stokes Equationsadrian_63Aún no hay calificaciones
- Over Voltage ProtectionDocumento15 páginasOver Voltage ProtectionSridharan MAún no hay calificaciones
- Induction MotorDocumento43 páginasInduction MotorAshvani ShuklaAún no hay calificaciones
- Power System Commissioning and Maintenance PracticeDocumento38 páginasPower System Commissioning and Maintenance PracticeMohamed MohsenAún no hay calificaciones
- Pse Problems Group AssignmentDocumento14 páginasPse Problems Group AssignmentSajid KhanAún no hay calificaciones
- Induction Machine ReportDocumento24 páginasInduction Machine ReportSiddharth NandhanAún no hay calificaciones
- Parallel Operation of DC GeneratorsDocumento7 páginasParallel Operation of DC Generatorsprakash srinivasanAún no hay calificaciones
- Problems Chapter 5 1Documento7 páginasProblems Chapter 5 1Siva KumarAún no hay calificaciones
- Earthing: Ronald Siakama Senior Protection Engineer Kenya PowerDocumento47 páginasEarthing: Ronald Siakama Senior Protection Engineer Kenya PowerSuity OneAún no hay calificaciones
- Psa1 NotesDocumento148 páginasPsa1 NotesEpitácio Junior Mauriz de Moura FeitosaAún no hay calificaciones
- Indian Institute of Engineering Science and Technology, Shibpur Department of Electrical EngineeringDocumento4 páginasIndian Institute of Engineering Science and Technology, Shibpur Department of Electrical EngineeringKool PrashantAún no hay calificaciones
- Ee 591 Machine 2 PDFDocumento39 páginasEe 591 Machine 2 PDFPrabhat Kumar SahuAún no hay calificaciones
- 11 Transmission Substation PDFDocumento27 páginas11 Transmission Substation PDFPao Castillon67% (3)
- Auma Button Type Manual PDFDocumento80 páginasAuma Button Type Manual PDFMotorola AndroidAún no hay calificaciones
- Unit 19 Single - Phase Induction MotorsDocumento4 páginasUnit 19 Single - Phase Induction MotorsKim Jeff BeringuelAún no hay calificaciones
- Classification of Transmission LinesDocumento15 páginasClassification of Transmission LinesJim Erol BancoroAún no hay calificaciones
- Operacion Recloser RoclwillDocumento54 páginasOperacion Recloser RoclwillChristian Vasquez MedranoAún no hay calificaciones
- What Is The Use of Choke in Florescent TubesDocumento7 páginasWhat Is The Use of Choke in Florescent Tubessumanta1981100% (2)
- Ee ThesisDocumento28 páginasEe ThesisEarl Jay UayanAún no hay calificaciones
- AC MachinesDocumento30 páginasAC MachinesAnonymous 5GBBc45Aún no hay calificaciones
- Development of Electric Drives in Light Rail Transit (LRT) SystemDocumento31 páginasDevelopment of Electric Drives in Light Rail Transit (LRT) SystemArjun Pratap Singh100% (1)
- Autotransformer ModifiedDocumento32 páginasAutotransformer ModifiedFahad MemonAún no hay calificaciones
- Example 8.27Documento4 páginasExample 8.27Babasrinivas Guduru100% (1)
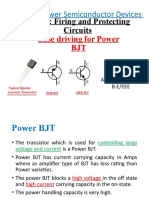
- Base Driving For Power BJT SivaDocumento16 páginasBase Driving For Power BJT SivaSachin SivaAún no hay calificaciones
- 02 Parallel Operation PDFDocumento16 páginas02 Parallel Operation PDFKazi Newaj FaisalAún no hay calificaciones
- Design Sheet of Armature For DC GeneratorDocumento15 páginasDesign Sheet of Armature For DC Generatoreme emeAún no hay calificaciones
- Assignment 1Documento2 páginasAssignment 1Shabih100% (1)
- Lecture 6 Development of Sequence NetworksDocumento51 páginasLecture 6 Development of Sequence NetworksJoshua Roberto Gruta100% (1)
- MicrosoftWord - Elec. Machine ContentsDocumento56 páginasMicrosoftWord - Elec. Machine ContentsAshish RaturiAún no hay calificaciones
- Difference Between Live Tank Type and Dead Tank Circuit BreakerDocumento2 páginasDifference Between Live Tank Type and Dead Tank Circuit BreakerHUDA ANTARAún no hay calificaciones
- Three Phase Transformer Connections PDFDocumento4 páginasThree Phase Transformer Connections PDFhelen tsegayAún no hay calificaciones
- Electrical Motor (1) DDocumento20 páginasElectrical Motor (1) Drksamy0102Aún no hay calificaciones
- DESIGNDocumento7 páginasDESIGNjaythakar8887Aún no hay calificaciones
- AC Electric Machines Lab ManulDocumento98 páginasAC Electric Machines Lab Manulmuhammad_sarwar_27Aún no hay calificaciones
- Study of Over Current Earth Fault RelayDocumento1 páginaStudy of Over Current Earth Fault RelayVirender RanaAún no hay calificaciones
- Parallel Operation of AlternatorDocumento13 páginasParallel Operation of AlternatorChirag Bafna0% (1)
- Components of An Earthing SystemDocumento8 páginasComponents of An Earthing SystemMirza Abdullah SarwarAún no hay calificaciones
- Chapter 7 Induction MotorsDocumento34 páginasChapter 7 Induction MotorslalaAún no hay calificaciones
- Advantages of Star Delta StarterDocumento1 páginaAdvantages of Star Delta StarterMoiz HasanAún no hay calificaciones
- Circuit ApplicationsDocumento65 páginasCircuit ApplicationsAman Baviskar100% (1)
- All Day Efficiency of A TransformerDocumento4 páginasAll Day Efficiency of A TransformerBhanu Ganesh LukkaAún no hay calificaciones
- AC MotorsDocumento50 páginasAC MotorsDanzel SepilloAún no hay calificaciones
- An Example How To Calculate Voltage Drop and Size of Electrical Cable - EEPDocumento8 páginasAn Example How To Calculate Voltage Drop and Size of Electrical Cable - EEPAnil MarturiAún no hay calificaciones
- Short Questions ECDDocumento7 páginasShort Questions ECDNanda Kishore RayAún no hay calificaciones
- Alternator RewindDocumento39 páginasAlternator RewindanwarAún no hay calificaciones
- PDFDocumento15 páginasPDFNilesh KhareAún no hay calificaciones
- Construction of Three Phase Induction MotorDocumento6 páginasConstruction of Three Phase Induction MotorMuhammadZaydArattKhanAún no hay calificaciones
- Report On Industrial Visit To Punnapra SubstationDocumento73 páginasReport On Industrial Visit To Punnapra SubstationAravind N100% (3)
- Capacitance and Dissipation Factor MeasurementsDocumento10 páginasCapacitance and Dissipation Factor MeasurementsIrfan AliAún no hay calificaciones
- ABB RET 521 TRANS DIFFERENTIAL PROTECTION INSTALLATION and COMMISSIONING MANUALDocumento67 páginasABB RET 521 TRANS DIFFERENTIAL PROTECTION INSTALLATION and COMMISSIONING MANUALNima Mahmoudpour100% (1)
- Comparison of Iec and Nema Schematic DiagramsDocumento8 páginasComparison of Iec and Nema Schematic DiagramsAlejandroPortuguezTapiaAún no hay calificaciones
- Applications of AM, SSB, VSBDocumento24 páginasApplications of AM, SSB, VSBKirthi Rk100% (1)
- Tutorial On Single Phase Induction MotorDocumento1 páginaTutorial On Single Phase Induction MotorHimanshu Saini0% (1)
- Solar New SyllabusDocumento4 páginasSolar New SyllabusM VetriselviAún no hay calificaciones
- Slip Ring Induction MotorsDocumento10 páginasSlip Ring Induction MotorsPrincepessa GaviAún no hay calificaciones
- Knowledge is "Real Power": Introduction to Power QualityDe EverandKnowledge is "Real Power": Introduction to Power QualityAún no hay calificaciones
- Induction MotorDocumento27 páginasInduction MotorHermione Calliope ChanAún no hay calificaciones
- Elec 107 Module 1Documento23 páginasElec 107 Module 1Kylle Bryan AranceAún no hay calificaciones
- Mokhohloa March RepDocumento17 páginasMokhohloa March RepTerdy MNAún no hay calificaciones
- Buck Boost ConvertersDocumento33 páginasBuck Boost ConvertersMuneerAhmed0% (1)
- The Big Bang: Muhammad Kahsif LatifDocumento8 páginasThe Big Bang: Muhammad Kahsif LatifMuneerAhmedAún no hay calificaciones
- Basic Concept of Electromagnatic Field PPT 1Documento11 páginasBasic Concept of Electromagnatic Field PPT 1MuneerAhmedAún no hay calificaciones
- Smart Grid System: Case Study TopicDocumento18 páginasSmart Grid System: Case Study TopicMuneerAhmedAún no hay calificaciones
- Al Khwārizmī MuneerDocumento11 páginasAl Khwārizmī MuneerMuneerAhmedAún no hay calificaciones
- Electromagnetic Engine: Topic of Case StudyDocumento17 páginasElectromagnetic Engine: Topic of Case StudyMuneerAhmedAún no hay calificaciones
- ANSI Codes PDFDocumento3 páginasANSI Codes PDFelectrical_1012000100% (2)
- DC MachinesDocumento20 páginasDC MachinesMuneerAhmedAún no hay calificaciones
- PST by MuneerDocumento14 páginasPST by MuneerMuneerAhmedAún no hay calificaciones
- Flipflops and F FlipflopsDocumento32 páginasFlipflops and F FlipflopsMuneerAhmedAún no hay calificaciones
- 4891 GlobalWarmingImpactsDocumento43 páginas4891 GlobalWarmingImpactsSergio YepesAún no hay calificaciones
- PST by MuneerDocumento14 páginasPST by MuneerMuneerAhmedAún no hay calificaciones
- The Eight Parts of Speech - Final PPDocumento70 páginasThe Eight Parts of Speech - Final PPRamesh NayakAún no hay calificaciones
- Cramer's RuleDocumento11 páginasCramer's RuleMuneerAhmedAún no hay calificaciones
- Safa Lush StuffDocumento57 páginasSafa Lush StuffMuneerAhmedAún no hay calificaciones
- Cramer's RuleDocumento11 páginasCramer's RuleMuneerAhmedAún no hay calificaciones
- First Law of Thermodynamics PDFDocumento6 páginasFirst Law of Thermodynamics PDFZayn AhmedAún no hay calificaciones
- Electrical Thumb Rules - (Part-3)Documento5 páginasElectrical Thumb Rules - (Part-3)Electrical Radical100% (1)
- Grade 4 Science Curriculum PDFDocumento6 páginasGrade 4 Science Curriculum PDFhlariveeAún no hay calificaciones
- IEC 1290-19 V1 MI003 ElsterDocumento57 páginasIEC 1290-19 V1 MI003 ElsterMaktoob M KnifAún no hay calificaciones
- Vibration MonitoringDocumento6 páginasVibration MonitoringankitsarvaiyaAún no hay calificaciones
- Moments of Inertia, Principal Moments: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIDocumento8 páginasMoments of Inertia, Principal Moments: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIunknownMYBALLSAún no hay calificaciones
- Princess Sumaya University For Technology: King Abdullah II Faculty of EngineeringDocumento4 páginasPrincess Sumaya University For Technology: King Abdullah II Faculty of EngineeringSaeed AhmadAún no hay calificaciones
- ASTM E 1316 Terminology PDFDocumento38 páginasASTM E 1316 Terminology PDFaliextomaAún no hay calificaciones
- Electrodinamika-PETA KONSEPDocumento1 páginaElectrodinamika-PETA KONSEPMelfi NenchiAún no hay calificaciones
- IP 2 DiodeDocumento6 páginasIP 2 DiodeRifky OfficialAún no hay calificaciones
- Free Electron TheoryDocumento44 páginasFree Electron TheoryAllen MarananAún no hay calificaciones
- Wmo - 266 v1 enDocumento198 páginasWmo - 266 v1 enAcademia GustavoAún no hay calificaciones
- Static SeminarDocumento51 páginasStatic SeminarRavi K NAún no hay calificaciones
- ND Manual 2015-2016Documento110 páginasND Manual 2015-2016Balakrushna SahuAún no hay calificaciones
- Study of The Characteristics of The Klystron Tube: Experiment-4Documento8 páginasStudy of The Characteristics of The Klystron Tube: Experiment-4Akanksha VermaAún no hay calificaciones
- Optimized Skid Design For Compressor PackagesDocumento9 páginasOptimized Skid Design For Compressor Packagesmario_gAún no hay calificaciones
- Cabluri Date Tehnice Mecanice PrysmianDocumento22 páginasCabluri Date Tehnice Mecanice Prysmianiulian17dAún no hay calificaciones
- Buoyancy, Flotation and StabilityDocumento13 páginasBuoyancy, Flotation and StabilityDenzel Edward CariagaAún no hay calificaciones
- How Gravity Affects MovementDocumento23 páginasHow Gravity Affects MovementSonny MatiasAún no hay calificaciones
- Important PDFDocumento107 páginasImportant PDF5b00014fAún no hay calificaciones
- Lab 1 ReportDocumento11 páginasLab 1 ReportangelosoutiAún no hay calificaciones
- CEPCC SAT Distribution Transformer WisonDocumento11 páginasCEPCC SAT Distribution Transformer WisonNaveed Bin QasimAún no hay calificaciones
- Fluid Mechanics Cheat SheetDocumento3 páginasFluid Mechanics Cheat SheettalatbilalAún no hay calificaciones
- 9702 s17 QP 12Documento20 páginas9702 s17 QP 12Seong Hun LeeAún no hay calificaciones
- 2.1 Electric+Flux+and+Gauss's+LawDocumento19 páginas2.1 Electric+Flux+and+Gauss's+LawSebi BangAún no hay calificaciones
- Introduction To Electrical Engineering 1Documento33 páginasIntroduction To Electrical Engineering 1mybiyi7740Aún no hay calificaciones