También podría gustarte
- Concurrency Freaks - Interrupt Handler in C11 With AtomicsDocumento4 páginasConcurrency Freaks - Interrupt Handler in C11 With Atomicskeyboard2014Aún no hay calificaciones
- BSP Porting Guide L3.0.35 1.1.0Documento63 páginasBSP Porting Guide L3.0.35 1.1.0keyboard2014Aún no hay calificaciones
- EK-RA6M4 - Evaluation Kit For RA6M4 MCU Group - RenesasDocumento6 páginasEK-RA6M4 - Evaluation Kit For RA6M4 MCU Group - Renesaskeyboard2014Aún no hay calificaciones
- Bootloader Design Considerations 90003207ADocumento12 páginasBootloader Design Considerations 90003207Akeyboard2014Aún no hay calificaciones
- An Easy Way To Build A Tree in JavaScript Using Object References - TypeOfNaNDocumento6 páginasAn Easy Way To Build A Tree in JavaScript Using Object References - TypeOfNaNkeyboard2014Aún no hay calificaciones
- Pt100 Transmitter MicrochipDocumento8 páginasPt100 Transmitter Microchipem01803257Aún no hay calificaciones
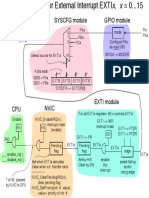
- GPIO InterruptDocumento1 páginaGPIO Interruptkeyboard2014Aún no hay calificaciones
- Setup of Rotary Flexible LinkDocumento4 páginasSetup of Rotary Flexible Linkkeyboard2014Aún no hay calificaciones
- Test #1 AMATYC Student Mathematics League October/November 2006Documento3 páginasTest #1 AMATYC Student Mathematics League October/November 2006keyboard2014Aún no hay calificaciones
- AMATYC Student Msthematics League: I + Atcsec: + Arccot: + Arccot I ? 4 4 4 5 21Documento3 páginasAMATYC Student Msthematics League: I + Atcsec: + Arccot: + Arccot I ? 4 4 4 5 21keyboard2014Aún no hay calificaciones
- ABCs of Probes enDocumento60 páginasABCs of Probes enkeyboard2014Aún no hay calificaciones
- A Simple Method For Estimation of Parameters in First Order SystemsDocumento13 páginasA Simple Method For Estimation of Parameters in First Order Systemskeyboard2014Aún no hay calificaciones
- SML Fa01Documento2 páginasSML Fa01keyboard2014Aún no hay calificaciones
- ECP Lab1 Simulink Intro r4Documento6 páginasECP Lab1 Simulink Intro r4keyboard2014Aún no hay calificaciones
- Ni Labview Rio Eval TutorialDocumento90 páginasNi Labview Rio Eval Tutorialkeyboard2014Aún no hay calificaciones
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (74)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1091)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (121)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2104)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- Configuring IPSec VPN - Layer 2 PDFDocumento7 páginasConfiguring IPSec VPN - Layer 2 PDFintikhabmAún no hay calificaciones
- CMPS447 - Lab 6 Tutorial Model AnswerDocumento7 páginasCMPS447 - Lab 6 Tutorial Model AnswerAbbas AlawiehAún no hay calificaciones
- 149ONU 404i Data SheetDocumento2 páginas149ONU 404i Data SheetKrishna GAún no hay calificaciones
- Unifi Questions Extract From Ubiquiti ForumDocumento7 páginasUnifi Questions Extract From Ubiquiti ForumHassan Funsho AkandeAún no hay calificaciones
- Demystifying Networking Assignment-Week 3: Correct Answer: B) UDPDocumento3 páginasDemystifying Networking Assignment-Week 3: Correct Answer: B) UDPMini BhattAún no hay calificaciones
- Module 2: Switching Concepts: Switching, Routing, and Wireless Essentials v7.0 (SRWE)Documento17 páginasModule 2: Switching Concepts: Switching, Routing, and Wireless Essentials v7.0 (SRWE)thanh vienAún no hay calificaciones
- IEEE 802.1adDocumento7 páginasIEEE 802.1adLe Viet HaAún no hay calificaciones
- Configuring An Oracle Solaris 11.4 System As A Router or A Load BalancerDocumento96 páginasConfiguring An Oracle Solaris 11.4 System As A Router or A Load Balancererrr33Aún no hay calificaciones
- Network Address Translation (NAT)Documento19 páginasNetwork Address Translation (NAT)telecom_457036Aún no hay calificaciones
- APT IP Codec EN 2022 0Documento4 páginasAPT IP Codec EN 2022 0Njomo Knyata100% (1)
- S4100Documento112 páginasS4100TI AgrizarAún no hay calificaciones
- 7.3.7 Lab 4 - View The Switch MAC Address TableDocumento8 páginas7.3.7 Lab 4 - View The Switch MAC Address TablePham Quang Huy (K16HL)Aún no hay calificaciones
- Soal-03 Packet Tracer - Configuring Standard ACLsDocumento3 páginasSoal-03 Packet Tracer - Configuring Standard ACLsReza RamadhanAún no hay calificaciones
- Bluesocket Controller (BSC) Setup and Administration GuideDocumento376 páginasBluesocket Controller (BSC) Setup and Administration GuideBeatriz RomanAún no hay calificaciones
- QTSS ModulesDocumento190 páginasQTSS ModulesBang TrinhAún no hay calificaciones
- Manual GRE INTERFAZ MIKROTIK CONFIG - Interface - Gre - MikroTik WikiDocumento3 páginasManual GRE INTERFAZ MIKROTIK CONFIG - Interface - Gre - MikroTik Wikidannlopezarce5012Aún no hay calificaciones
- CAN Bus Pin Out, and CANopen Pinout, With Signal NamesDocumento4 páginasCAN Bus Pin Out, and CANopen Pinout, With Signal NamesVincentius Nikim100% (1)
- Pembahasan Ukk 2018 TKJ Paket 4Documento1 páginaPembahasan Ukk 2018 TKJ Paket 4Marliza DevianaAún no hay calificaciones
- Data and Computer Communications: Chapter 18 - Internet ProtocolsDocumento71 páginasData and Computer Communications: Chapter 18 - Internet ProtocolsHans MortenAún no hay calificaciones
- Performance Tuning The Network Stack On Mac OS XDocumento14 páginasPerformance Tuning The Network Stack On Mac OS XCorey LaliberteAún no hay calificaciones
- Mikrotik Hotspot PDFDocumento65 páginasMikrotik Hotspot PDFJosé BeltránAún no hay calificaciones
- Hardware Specifications: ETERNUS Hybrid Storage Systems Comparison ChartDocumento4 páginasHardware Specifications: ETERNUS Hybrid Storage Systems Comparison ChartTuan Vo QuocAún no hay calificaciones
- CCNP Tshoot Final95%Documento26 páginasCCNP Tshoot Final95%Bijay BanstolaAún no hay calificaciones
- Advanced SAN Troubleshooting: Mike FraseDocumento60 páginasAdvanced SAN Troubleshooting: Mike FrasejeffgrantinctAún no hay calificaciones
- Benet Ipfs BlockchainDocumento77 páginasBenet Ipfs BlockchainDonyitproAún no hay calificaciones
- 9Ch NMEA (Serial) Ethernet GatewayDocumento16 páginas9Ch NMEA (Serial) Ethernet GatewayEvgeny YudinAún no hay calificaciones
- Load Balancing Techniques For Release 11I and Release 12 E-Business EnvironmentsDocumento8 páginasLoad Balancing Techniques For Release 11I and Release 12 E-Business EnvironmentsrramsAún no hay calificaciones
- Ccie R&s Dikta Vol.1Documento27 páginasCcie R&s Dikta Vol.1CarlosAún no hay calificaciones
- Port Scanning Techniques by Using NmapDocumento3 páginasPort Scanning Techniques by Using NmapAHMED MOHAMEDAún no hay calificaciones
- Quectel GSM FTP at Commands Manual V1.4Documento34 páginasQuectel GSM FTP at Commands Manual V1.4Thanh nhaAún no hay calificaciones