También podría gustarte
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- Checklist of Review Criteria For Research Manuscripts PDFDocumento3 páginasChecklist of Review Criteria For Research Manuscripts PDFJack PadiAún no hay calificaciones
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- A Checklist For Editors, Reviewers, and Authors Checklist PDFDocumento4 páginasA Checklist For Editors, Reviewers, and Authors Checklist PDFJack PadiAún no hay calificaciones
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Results of Competition: Innovation in Health and Life Sciences Round 3 - Up To 12 Months 1710 - HLS - R3 - 12MDocumento56 páginasResults of Competition: Innovation in Health and Life Sciences Round 3 - Up To 12 Months 1710 - HLS - R3 - 12MJack PadiAún no hay calificaciones
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (894)
- Results of Competition: Support For Smes To Evaluate Innovative Medical Technologies 1801 - CRD - Ols - SmeimtDocumento15 páginasResults of Competition: Support For Smes To Evaluate Innovative Medical Technologies 1801 - CRD - Ols - SmeimtJack PadiAún no hay calificaciones
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- Results of Competition: November 2017 Sector Competition Strand 2: Infrastructure Systems - 3 To 12 Months 1711 - MM - INFRA - R4 - ST2 - 12MDocumento32 páginasResults of Competition: November 2017 Sector Competition Strand 2: Infrastructure Systems - 3 To 12 Months 1711 - MM - INFRA - R4 - ST2 - 12MJack PadiAún no hay calificaciones
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- Results of Competition: Robotics and AI in Extreme Environments 1806 - ROB - AIDocumento1 páginaResults of Competition: Robotics and AI in Extreme Environments 1806 - ROB - AIJack PadiAún no hay calificaciones
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- Open Round 5 March 2018 - Competition Results PDFDocumento133 páginasOpen Round 5 March 2018 - Competition Results PDFJack PadiAún no hay calificaciones
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Open Round 1 2018-19 - Competition Results PDFDocumento126 páginasOpen Round 1 2018-19 - Competition Results PDFJack PadiAún no hay calificaciones
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (587)
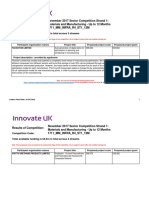
- Results of Competition: November 2017 Sector Competition Strand 1: Materials and Manufacturing - Up To 12 Months 1711 - MM - INFRA - R4 - ST1 - 12MDocumento44 páginasResults of Competition: November 2017 Sector Competition Strand 1: Materials and Manufacturing - Up To 12 Months 1711 - MM - INFRA - R4 - ST1 - 12MJack PadiAún no hay calificaciones
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (265)
- Open Round 2 - Competition Results PDFDocumento156 páginasOpen Round 2 - Competition Results PDFJack PadiAún no hay calificaciones
- Results of Competition: First of A Kind: Demonstrating Tomorrow's Trains Today 1710 - SBRI - FOAK - RAILDocumento17 páginasResults of Competition: First of A Kind: Demonstrating Tomorrow's Trains Today 1710 - SBRI - FOAK - RAILJack PadiAún no hay calificaciones
- UK Construction Projects Receive £13.3 MillionDocumento52 páginasUK Construction Projects Receive £13.3 MillionJack PadiAún no hay calificaciones
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- Results of Competition: SBRI: Protecting Nuclear Decommissioning Operators Competition Code: 1804 - SBRI - SELLAFIELDDocumento26 páginasResults of Competition: SBRI: Protecting Nuclear Decommissioning Operators Competition Code: 1804 - SBRI - SELLAFIELDJack PadiAún no hay calificaciones
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (73)
- Electric Vehicle Charging Projects Receive Over £1 Million in FundingDocumento45 páginasElectric Vehicle Charging Projects Receive Over £1 Million in FundingJack PadiAún no hay calificaciones
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- Competition Results - SBRI Rail First of A Kind Round 3 - Resilience Freight Noise Environment PDFDocumento48 páginasCompetition Results - SBRI Rail First of A Kind Round 3 - Resilience Freight Noise Environment PDFJack PadiAún no hay calificaciones
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- Plastics Innovation Towards Zero Waste PDFDocumento36 páginasPlastics Innovation Towards Zero Waste PDFJack PadiAún no hay calificaciones
- Competition Results - SBRI First of A Kind 2 - Demonstrating Tomorrow S PDFDocumento20 páginasCompetition Results - SBRI First of A Kind 2 - Demonstrating Tomorrow S PDFJack PadiAún no hay calificaciones
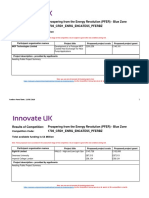
- PFER Blue Zone Projects FundedDocumento22 páginasPFER Blue Zone Projects FundedJack PadiAún no hay calificaciones
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- Results of Competition: SBRI: Antimicrobial Resistance (AMR) in Humans Competition Code: 1807 - SBRI - ANTIMICROBIALDocumento26 páginasResults of Competition: SBRI: Antimicrobial Resistance (AMR) in Humans Competition Code: 1807 - SBRI - ANTIMICROBIALJack PadiAún no hay calificaciones
- Results of Competition: Newton - UK-China Agri Tech Challenge 2017 Competition Code: 1706 - CRD1 - NEWTON - CHNBBSRCDocumento19 páginasResults of Competition: Newton - UK-China Agri Tech Challenge 2017 Competition Code: 1706 - CRD1 - NEWTON - CHNBBSRCJack PadiAún no hay calificaciones
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- Results of Competition: Young Innovators' Awards Batch 1 1802 - CRD - YOUNG - INNOV - 1Documento24 páginasResults of Competition: Young Innovators' Awards Batch 1 1802 - CRD - YOUNG - INNOV - 1Jack PadiAún no hay calificaciones
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2219)
- Design Foundation Competition Funds Digital ProjectsDocumento74 páginasDesign Foundation Competition Funds Digital ProjectsJack PadiAún no hay calificaciones
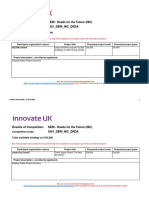
- Results of Competition: SBRI - Roads For The Future (NIC) 1801 - SBRI - NIC - DRDADocumento5 páginasResults of Competition: SBRI - Roads For The Future (NIC) 1801 - SBRI - NIC - DRDAJack PadiAún no hay calificaciones
- December 2017 Sector Competition - Open - Competition Results 13 - To - 24 - Months PDFDocumento46 páginasDecember 2017 Sector Competition - Open - Competition Results 13 - To - 24 - Months PDFJack PadiAún no hay calificaciones
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- Results of Competition: Sustainable Urbanisation Global Initiative (SUGI) 1612 - EU - ERANET - URBANDocumento7 páginasResults of Competition: Sustainable Urbanisation Global Initiative (SUGI) 1612 - EU - ERANET - URBANJack PadiAún no hay calificaciones
- January 2018 Sector Competition - Strand 1 Health and Life Sciences - Competition Results PDFDocumento63 páginasJanuary 2018 Sector Competition - Strand 1 Health and Life Sciences - Competition Results PDFJack PadiAún no hay calificaciones
- Wireless Electric Vehicle Charging For Commercial Users - FS - Competition Results PDFDocumento19 páginasWireless Electric Vehicle Charging For Commercial Users - FS - Competition Results PDFJack PadiAún no hay calificaciones
- Results of Competition: Precision Medicine Technologies: Shaping The Future Competition Code: 1805 - CRD - ASHN - PREC - MEDDocumento39 páginasResults of Competition: Precision Medicine Technologies: Shaping The Future Competition Code: 1805 - CRD - ASHN - PREC - MEDJack PadiAún no hay calificaciones
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (119)
- Results of Competition: Newton Fund - China - Guangdong Province 1707 - CRD1 - NEWTON - CHNGDSTDocumento10 páginasResults of Competition: Newton Fund - China - Guangdong Province 1707 - CRD1 - NEWTON - CHNGDSTJack PadiAún no hay calificaciones
- Results of Competition: Newton - UK-India Industrial Biotechnology (BBSRC) 1706 - Crd1 - Newton - IndbbsrcDocumento8 páginasResults of Competition: Newton - UK-India Industrial Biotechnology (BBSRC) 1706 - Crd1 - Newton - IndbbsrcJack PadiAún no hay calificaciones
- TNB AR 2022 Corporate StructureDocumento2 páginasTNB AR 2022 Corporate StructureZamzuri P AminAún no hay calificaciones
- OD Main Switch & OD OFF Indicator Light CircuitDocumento4 páginasOD Main Switch & OD OFF Indicator Light Circuitcelestino tuliaoAún no hay calificaciones
- Selection ToolsDocumento13 páginasSelection ToolsDominador Gaduyon DadalAún no hay calificaciones
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2099)
- Hublit Limphaire Leaflet India PDFDocumento2 páginasHublit Limphaire Leaflet India PDFAkshay RaiAún no hay calificaciones
- Julia Warner 2018Documento1 páginaJulia Warner 2018Julia WarnerAún no hay calificaciones
- Ficha Tecnica 750 GPMDocumento156 páginasFicha Tecnica 750 GPMByron Chele0% (2)
- Circular Tank Radius CalculationDocumento25 páginasCircular Tank Radius CalculationQamar AbbasAún no hay calificaciones
- Powerful Cooling and Easy Installation For Really Large SpacesDocumento4 páginasPowerful Cooling and Easy Installation For Really Large Spacesalkaf08Aún no hay calificaciones
- LogDocumento27 páginasLogmilli0chilliAún no hay calificaciones
- Engineering Data, Summary of Productivity 2022Documento2 páginasEngineering Data, Summary of Productivity 2022Listya AnggrainiAún no hay calificaciones
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- TOR Admin Assistant SC - 4Documento1 páginaTOR Admin Assistant SC - 4newarakanAún no hay calificaciones
- Touch Screen TechnologyDocumento18 páginasTouch Screen TechnologySmîlērAún no hay calificaciones
- Data ArchivingDocumento63 páginasData ArchivingHot_sergio100% (1)
- Factors Affecting Purchase Intentions in Generation Z Towards Hipster Cafe in Kelantan LOCKEDDocumento70 páginasFactors Affecting Purchase Intentions in Generation Z Towards Hipster Cafe in Kelantan LOCKEDlassan199358Aún no hay calificaciones
- OFFICE 365 PROXY GUIDEDocumento4 páginasOFFICE 365 PROXY GUIDErossloveladyAún no hay calificaciones
- E12817 GT AC5300 Manual EnglishDocumento152 páginasE12817 GT AC5300 Manual Englishlegato1984Aún no hay calificaciones
- 0 EDEM Applications MeDocumento16 páginas0 EDEM Applications MeRuben PurcaAún no hay calificaciones
- Amptec Issue 7Documento8 páginasAmptec Issue 7Linda Turner-BoothAún no hay calificaciones
- DSSSB 01 2017Documento9 páginasDSSSB 01 2017Praneeta KatdareAún no hay calificaciones
- BS 5896 2010Documento33 páginasBS 5896 2010shashiresh50% (2)
- Builder's Greywater Guide Branched DrainDocumento4 páginasBuilder's Greywater Guide Branched DrainGreen Action Sustainable Technology GroupAún no hay calificaciones
- Ite 001aDocumento6 páginasIte 001ajoshuaAún no hay calificaciones
- Electronic Ticket Receipt, November 03 For MR ARAYA GEBRESLASSIE BERHEDocumento2 páginasElectronic Ticket Receipt, November 03 For MR ARAYA GEBRESLASSIE BERHEMengstu Gebreslassie50% (2)
- Disney Channel JRDocumento14 páginasDisney Channel JRJonna Parane TrongcosoAún no hay calificaciones
- Manuel Solaris Ccds1425-St Ccds1425-Dn Ccds1425-Dnx Ccds1425-Dn36en deDocumento42 páginasManuel Solaris Ccds1425-St Ccds1425-Dn Ccds1425-Dnx Ccds1425-Dn36en deAllegra AmiciAún no hay calificaciones
- KernelDocumento326 páginasKernelSkyezine Via Kit FoxAún no hay calificaciones
- Cisco As5300 Voice GatewayDocumento12 páginasCisco As5300 Voice GatewayAbderrahmane AbdmezianeAún no hay calificaciones
- CAT775GDocumento32 páginasCAT775GAndy Chan100% (1)
- Mobil Pegasus™ 1100 Series Mobil Pegasus™ 1100 Series Mobil Pegasus™ 1100 Series Mobil Pegasus™ 1100 SeriesDocumento3 páginasMobil Pegasus™ 1100 Series Mobil Pegasus™ 1100 Series Mobil Pegasus™ 1100 Series Mobil Pegasus™ 1100 SeriesMudabbir Shan AhmedAún no hay calificaciones
- DH3E-L-SC-A3-K-170329-0009 Commissioning Inspection & Test Plan (ITP) For BOP and Associated Test FormsDocumento2 páginasDH3E-L-SC-A3-K-170329-0009 Commissioning Inspection & Test Plan (ITP) For BOP and Associated Test FormsBình Quách HảiAún no hay calificaciones
- From Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsDe EverandFrom Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsAún no hay calificaciones
- A Comprehensive Guide to Video Game Design SchoolsDe EverandA Comprehensive Guide to Video Game Design SchoolsAún no hay calificaciones
- Certified Solidworks Professional Advanced Weldments Exam PreparationDe EverandCertified Solidworks Professional Advanced Weldments Exam PreparationCalificación: 5 de 5 estrellas5/5 (1)