También podría gustarte
- Cso 498 Java ProgrammingDocumento10 páginasCso 498 Java ProgrammingAishwarya RajeshAún no hay calificaciones
- CI 17182 SKEM4173 Artificial IntelligenceDocumento5 páginasCI 17182 SKEM4173 Artificial IntelligencefauzansaadonAún no hay calificaciones
- Jawaharlal Nehru Engineering College: Laboratory ManualDocumento57 páginasJawaharlal Nehru Engineering College: Laboratory ManualAnil KumarAún no hay calificaciones
- Jan9-13 Grade7Documento6 páginasJan9-13 Grade7Maestro de GrapicoAún no hay calificaciones
- Alliance University: CSL 406 Course Title: Java Programming LabDocumento8 páginasAlliance University: CSL 406 Course Title: Java Programming LabAishwarya RajeshAún no hay calificaciones
- Outline 3861 f19 Rev1Documento3 páginasOutline 3861 f19 Rev1vigneshwar RAún no hay calificaciones
- Internet of Things-BTCS9211-Course HandoutDocumento8 páginasInternet of Things-BTCS9211-Course HandoutPratush DevAún no hay calificaciones
- Eie529 20231Documento3 páginasEie529 20231jiaoguangyi666Aún no hay calificaciones
- Programme - Teachers and Students FinalDocumento2 páginasProgramme - Teachers and Students Finalapi-445959198Aún no hay calificaciones
- Syllabus 2017 Numerical Methods For Civil EngineeringDocumento3 páginasSyllabus 2017 Numerical Methods For Civil EngineeringNyikolajev100% (1)
- RPH Sains DLP Y3 2018Documento29 páginasRPH Sains DLP Y3 2018Sukhveer Kaur0% (1)
- NGEC 4 - MODULE 2 - Week 7 & 8 (2021 - 2022)Documento5 páginasNGEC 4 - MODULE 2 - Week 7 & 8 (2021 - 2022)Esmabe PhilipAún no hay calificaciones
- Course Packet - Capro 2 (Capstone Project 2)Documento196 páginasCourse Packet - Capro 2 (Capstone Project 2)Fernando TanginAún no hay calificaciones
- DLP MT Y4 W12 (Inculkate - My) - 2023Documento4 páginasDLP MT Y4 W12 (Inculkate - My) - 2023Nur Afifah YushaimiAún no hay calificaciones
- Chapter 1 - Session 1 - The Value of Supply Chain Network Design (Compatibility Mode)Documento8 páginasChapter 1 - Session 1 - The Value of Supply Chain Network Design (Compatibility Mode)BẢO ĐẶNG QUỐCAún no hay calificaciones
- DDM Module 4212 - Master Thesis: Use and TransferDocumento2 páginasDDM Module 4212 - Master Thesis: Use and TransferKashyap SorathiyaAún no hay calificaciones
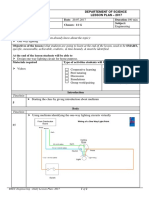
- Addu High School Lesson Plan on Lighting CircuitsDocumento2 páginasAddu High School Lesson Plan on Lighting Circuitsmohammad rashid tkAún no hay calificaciones
- ESP411 2019 Study Guide Rev1Documento18 páginasESP411 2019 Study Guide Rev1ShivaaniAún no hay calificaciones
- CMPE160_SyllabusDocumento1 páginaCMPE160_Syllabusbengisutakkin34Aún no hay calificaciones
- Course OutlineDocumento9 páginasCourse OutlineRonaldo MessiAún no hay calificaciones
- Course Syllabus: Assistant Professor Dr. Qadri HamarshehDocumento7 páginasCourse Syllabus: Assistant Professor Dr. Qadri HamarshehSunu WibiramaAún no hay calificaciones
- ETEC Computer Technique-2 ModuleDocumento4 páginasETEC Computer Technique-2 ModuleZina Abdulkareem AbduljaleelAún no hay calificaciones
- Course Details Units of Credit Contact Hours Class Workshop Computer LabDocumento7 páginasCourse Details Units of Credit Contact Hours Class Workshop Computer LabTito MudanyeAún no hay calificaciones
- Data Structures and Algorithms SyllabusDocumento9 páginasData Structures and Algorithms SyllabusBongbong GalloAún no hay calificaciones
- MODNUMECE - Numerical Models in Civil and Structural EngineeringDocumento5 páginasMODNUMECE - Numerical Models in Civil and Structural EngineeringAnonymous fYHyRa2XAún no hay calificaciones
- Digital Image Processing: Jawaharlal Nehru Engineering College AurangabadDocumento35 páginasDigital Image Processing: Jawaharlal Nehru Engineering College AurangabadPRABHU R 20PHD0826Aún no hay calificaciones
- F16 211 OutlineDocumento11 páginasF16 211 OutlineParv SinghAún no hay calificaciones
- CE Reinforced Concrete Fundamentals: Ted UniversityDocumento12 páginasCE Reinforced Concrete Fundamentals: Ted UniversityAbbdullah RayhanAún no hay calificaciones
- CVEN4308 Structural Dynamics: School of Civil and Environmental EngineeringDocumento10 páginasCVEN4308 Structural Dynamics: School of Civil and Environmental Engineeringmohamed ahmedAún no hay calificaciones
- APSC180 Syllabus 2021-22 W1Documento14 páginasAPSC180 Syllabus 2021-22 W1Samantha KriegAún no hay calificaciones
- 65 SoftengsyllabusDocumento14 páginas65 SoftengsyllabusamuamolAún no hay calificaciones
- SC LM MSJDocumento19 páginasSC LM MSJANUJAún no hay calificaciones
- ELEC9723 Speech Processing Course OutlineDocumento9 páginasELEC9723 Speech Processing Course Outlineओम सिहAún no hay calificaciones
- Eng 210Documento7 páginasEng 210ندى البلويAún no hay calificaciones
- Engineering Design and Prototying-G3UB101B-COURSE PACKDocumento14 páginasEngineering Design and Prototying-G3UB101B-COURSE PACKaryankumarpoddar7Aún no hay calificaciones
- Deep Learning Course File Aiml-1Documento183 páginasDeep Learning Course File Aiml-16644 HaripriyaAún no hay calificaciones
- Addu High School Lesson Plan - Lighting CircuitsDocumento2 páginasAddu High School Lesson Plan - Lighting Circuitsmohammad rashid tkAún no hay calificaciones
- CS111 Course OutlineDocumento8 páginasCS111 Course OutlineRuben MoluAún no hay calificaciones
- Module Outline 2023Documento5 páginasModule Outline 2023KeamogetsweAún no hay calificaciones
- Deep Learning in CV: Design & Implement ApproachesDocumento3 páginasDeep Learning in CV: Design & Implement ApproachesClaudia OspinaAún no hay calificaciones
- CoursePlanner 212Documento3 páginasCoursePlanner 212weimin chooAún no hay calificaciones
- City University of Hong Kong Course Syllabus Offered by Department of Computer Science With Effect From Semester A 2015/16Documento5 páginasCity University of Hong Kong Course Syllabus Offered by Department of Computer Science With Effect From Semester A 2015/16Dylam LamAún no hay calificaciones
- TE(IT) Lab Manual for ADBMSDocumento28 páginasTE(IT) Lab Manual for ADBMSAkash DodkeAún no hay calificaciones
- Cee 215 - Co-PoDocumento7 páginasCee 215 - Co-PoSadat MahmudAún no hay calificaciones
- Ee 4105Documento5 páginasEe 4105Lanz de la CruzAún no hay calificaciones
- Advanced Digital Systems Design 01Documento24 páginasAdvanced Digital Systems Design 01Melsougly BryceAún no hay calificaciones
- CTF gr9 Promotions Lesson 1Documento3 páginasCTF gr9 Promotions Lesson 1api-530459956Aún no hay calificaciones
- DLL IDEA TemplateDocumento10 páginasDLL IDEA TemplateImeePabitonRubioAún no hay calificaciones
- Module Outline1Documento5 páginasModule Outline1Renzo Ray M. OlivarAún no hay calificaciones
- Work Design & Ergo Course OutlineDocumento3 páginasWork Design & Ergo Course Outlineeric_njAún no hay calificaciones
- Master Course Computational Engineering VGU-P04: Modern Programming Concepts in EngineeringDocumento2 páginasMaster Course Computational Engineering VGU-P04: Modern Programming Concepts in EngineeringthaoAún no hay calificaciones
- 6.3.32 GEE11a-M Environmental Sciences and EngineeringDocumento5 páginas6.3.32 GEE11a-M Environmental Sciences and EngineeringNechole Villaflores RogelioAún no hay calificaciones
- Learning PlatformDocumento12 páginasLearning PlatformrocaoAún no hay calificaciones
- CIV1005W Course Outline 2018Documento4 páginasCIV1005W Course Outline 2018Mark JacobsAún no hay calificaciones
- Forecasting Methods in Economics and Finance CourseDocumento2 páginasForecasting Methods in Economics and Finance Coursesten stureAún no hay calificaciones
- Digital System Design Course OverviewDocumento26 páginasDigital System Design Course OverviewMelsougly BryceAún no hay calificaciones
- Course Outline DJJ 5062Documento5 páginasCourse Outline DJJ 5062Munisprasad MuniandyAún no hay calificaciones
- BE DIP Lab Manual PDFDocumento33 páginasBE DIP Lab Manual PDFAmber SarwarAún no hay calificaciones
- Introduction To Programming SyllabusDocumento5 páginasIntroduction To Programming Syllabusvoduykhoa2504Aún no hay calificaciones
- Umlemb: Uml For Embedded Systems Ii. Modeling in SysmlDocumento71 páginasUmlemb: Uml For Embedded Systems Ii. Modeling in SysmlDaniel Cervantes CabreraAún no hay calificaciones
- Analytical Solution of PDEsDocumento88 páginasAnalytical Solution of PDEsRaul GonzalezAún no hay calificaciones
- A Finite Elements Method To Solve The Bloch-Torrey EquationDocumento20 páginasA Finite Elements Method To Solve The Bloch-Torrey EquationDaniel Cervantes CabreraAún no hay calificaciones
- LectureNotes RBFDocumento58 páginasLectureNotes RBFDaniel Cervantes CabreraAún no hay calificaciones
- IBC of AquaponicsDocumento187 páginasIBC of AquaponicsJohnAún no hay calificaciones
- CUDA C Programming GuideDocumento173 páginasCUDA C Programming GuidepierignoAún no hay calificaciones
- Cam8809 PDFDocumento12 páginasCam8809 PDFDaniel Cervantes CabreraAún no hay calificaciones
- Document 38Documento4 páginasDocument 38Daniel Cervantes CabreraAún no hay calificaciones
- Chebyshev-Polynomials-J.c. Masond.c. Handscomb PDFDocumento335 páginasChebyshev-Polynomials-J.c. Masond.c. Handscomb PDFDaniel Cervantes CabreraAún no hay calificaciones
- PDE solution centers visualizationDocumento1 páginaPDE solution centers visualizationDaniel Cervantes CabreraAún no hay calificaciones
- A Multilevel Preconditioner and Its Shared Memory Implementation For New Generation Reservoir Simulator-Wang2014Documento8 páginasA Multilevel Preconditioner and Its Shared Memory Implementation For New Generation Reservoir Simulator-Wang2014Daniel Cervantes CabreraAún no hay calificaciones
- Sol 9 Fall 04Documento8 páginasSol 9 Fall 04Daniel Cervantes CabreraAún no hay calificaciones
- Art 2017Documento13 páginasArt 2017Daniel Cervantes CabreraAún no hay calificaciones
- Manual de Aquaponia FaoDocumento288 páginasManual de Aquaponia FaoYves Moreira100% (3)
- Cam 8809Documento12 páginasCam 8809Daniel Cervantes CabreraAún no hay calificaciones
- Sol 3 Fall 04Documento12 páginasSol 3 Fall 04Daniel Cervantes CabreraAún no hay calificaciones
- Sol 7 Fall 04Documento7 páginasSol 7 Fall 04Daniel Cervantes CabreraAún no hay calificaciones
- SOLUTIONS TO DIFFERENTIAL EQUATIONSDocumento9 páginasSOLUTIONS TO DIFFERENTIAL EQUATIONSDaniel Cervantes CabreraAún no hay calificaciones
- SparseLibraryBenchmark 0Documento28 páginasSparseLibraryBenchmark 0Daniel Cervantes CabreraAún no hay calificaciones
- Sin X (X +a) Sin X ( X) : Date: October 16, 2002Documento6 páginasSin X (X +a) Sin X ( X) : Date: October 16, 2002Daniel Cervantes CabreraAún no hay calificaciones
- Sol 4 Fall 04Documento12 páginasSol 4 Fall 04Daniel Cervantes CabreraAún no hay calificaciones
- NagarajDocumento5 páginasNagarajDaniel Cervantes CabreraAún no hay calificaciones
- Sol 2 Fall 04Documento6 páginasSol 2 Fall 04Daniel Cervantes CabreraAún no hay calificaciones
- Planes Over Isometric Systems: W. Erd Os, Z. Moore, K. Weyl and O. WangDocumento9 páginasPlanes Over Isometric Systems: W. Erd Os, Z. Moore, K. Weyl and O. WangweweqeAún no hay calificaciones
- ENGINEERING MATHEMATICS-IIDocumento3 páginasENGINEERING MATHEMATICS-IIMohammed DanishAún no hay calificaciones
- ZaraDocumento35 páginasZaraRaymytechAún no hay calificaciones
- HW 6 SolutionsDocumento3 páginasHW 6 SolutionsAntonioAún no hay calificaciones
- 45 MA515 NotesDocumento52 páginas45 MA515 NotesHostel 10 Hall ManagerAún no hay calificaciones
- Thin-Walled Structures: Full Length ArticleDocumento18 páginasThin-Walled Structures: Full Length ArticledpantousaAún no hay calificaciones
- Physics of Thermo-Acoustic Sound GenerationDocumento13 páginasPhysics of Thermo-Acoustic Sound GenerationtaAún no hay calificaciones
- Arbaminch University: Collage of Natural SicenceDocumento7 páginasArbaminch University: Collage of Natural Sicencebereket simonAún no hay calificaciones
- MSc Algebra Paper I: Core ConceptsDocumento51 páginasMSc Algebra Paper I: Core Conceptspriyanka bAún no hay calificaciones
- 12 - Laplace Transforms and Their ApplicationsDocumento72 páginas12 - Laplace Transforms and Their ApplicationsAnonymous OrhjVLXO5sAún no hay calificaciones
- Ordinary Differential Equations OdesDocumento25 páginasOrdinary Differential Equations OdesDeepshikhaSinghAún no hay calificaciones
- Implicit Partial Differential Equations: Bernard Dacorogna and Paolo MarcelliniDocumento64 páginasImplicit Partial Differential Equations: Bernard Dacorogna and Paolo MarcelliniFernando Sanez0% (1)
- Electrochemical Modeling and Parameterization Towards Co - 2022 - Control EngineDocumento24 páginasElectrochemical Modeling and Parameterization Towards Co - 2022 - Control Enginea.djaraouiAún no hay calificaciones
- Nonlinear Dynamics and ChaosDocumento9 páginasNonlinear Dynamics and ChaoshellsfullsoimhereAún no hay calificaciones
- Amit Ranjan, Jian Qin, and David C. Morse - Linear Response and Stability of Ordered Phases of Block Copolymer MeltsDocumento16 páginasAmit Ranjan, Jian Qin, and David C. Morse - Linear Response and Stability of Ordered Phases of Block Copolymer MeltsDremHpAún no hay calificaciones
- HD MechDocumento62 páginasHD MechSani UnanAún no hay calificaciones
- Cha-05 Adjustment Computation 01of01!15!05-2018Documento85 páginasCha-05 Adjustment Computation 01of01!15!05-2018aditAún no hay calificaciones
- Partial Differential Equations: MST209 Mathematical Methods and ModelsDocumento32 páginasPartial Differential Equations: MST209 Mathematical Methods and Modelschristos032Aún no hay calificaciones
- ME324 - Semi Infinite Slab PDFDocumento11 páginasME324 - Semi Infinite Slab PDFAlpha WolfAún no hay calificaciones
- Chapter 7 Numerical Solution of Ordinary Differential EquationsDocumento5 páginasChapter 7 Numerical Solution of Ordinary Differential EquationstrfuawlachewAún no hay calificaciones
- Be Mechanical Engineering Cbcs Syllabus 2015 16 OnwardsDocumento492 páginasBe Mechanical Engineering Cbcs Syllabus 2015 16 OnwardsRAKESH RAVIAún no hay calificaciones
- DEDocumento10 páginasDEosukotiAún no hay calificaciones
- Similarity solutions to PDEsDocumento4 páginasSimilarity solutions to PDEszabelAún no hay calificaciones
- Partial Differential EquationDocumento39 páginasPartial Differential EquationTaimoor AliAún no hay calificaciones
- Isothermal Transient Numerical ModelDocumento28 páginasIsothermal Transient Numerical ModelAditAún no hay calificaciones
- Cheg Process ControlDocumento279 páginasCheg Process Controltesfay gebreAún no hay calificaciones
- 111107111 (1)Documento3 páginas111107111 (1)GAurav JOshi0% (1)
- Mechanical PG Syllabus Manufacturing Module 2019-20 (CBCS)Documento41 páginasMechanical PG Syllabus Manufacturing Module 2019-20 (CBCS)abdulghaforAún no hay calificaciones
- MSC Syll Math-UohDocumento49 páginasMSC Syll Math-Uohrcpuram01Aún no hay calificaciones
- LO - SCI 3530 Numerical Methods For Partial Differential EquationsDocumento3 páginasLO - SCI 3530 Numerical Methods For Partial Differential Equationsa_minisoft2005Aún no hay calificaciones