También podría gustarte
- W9a Autoencoders PcaDocumento7 páginasW9a Autoencoders PcazeliawillscumbergAún no hay calificaciones
- Waypoint Precision (Harvard)Documento23 páginasWaypoint Precision (Harvard)Aidan MonaghanAún no hay calificaciones
- Separation Logic: A Logic For Shared Mutable Data StructuresDocumento20 páginasSeparation Logic: A Logic For Shared Mutable Data Structures蘇意喬Aún no hay calificaciones
- Position Analysis IntroductionDocumento5 páginasPosition Analysis Introductionmuddassir razzaqAún no hay calificaciones
- Advanced Data Analytics: Simon ScheideggerDocumento75 páginasAdvanced Data Analytics: Simon ScheideggerRuben KempterAún no hay calificaciones
- A Class of Co-Design Problems With Cyclic Constraints and Their SolutionDocumento8 páginasA Class of Co-Design Problems With Cyclic Constraints and Their SolutionRajasekar PanneerselvamAún no hay calificaciones
- Constraint Reformulation in A Hierarchical Path PlannerDocumento6 páginasConstraint Reformulation in A Hierarchical Path PlannerElvor eskanAún no hay calificaciones
- SS 2 Physics First Term E-NoteDocumento99 páginasSS 2 Physics First Term E-Notekanajoseph2009Aún no hay calificaciones
- Succinct Posets PDFDocumento15 páginasSuccinct Posets PDFanant_nimkar9243Aún no hay calificaciones
- Backjump-Based Backtracking For Constraint Satisfaction ProblemsDocumento42 páginasBackjump-Based Backtracking For Constraint Satisfaction ProblemsPoovarasan 8069Aún no hay calificaciones
- Vectors: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIDocumento26 páginasVectors: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIEpic WinAún no hay calificaciones
- Kitamura1999. An Approach To The Emergent Design Theory and Applications PDFDocumento4 páginasKitamura1999. An Approach To The Emergent Design Theory and Applications PDFAmilcar MagaçoAún no hay calificaciones
- Recognition Using Curvature Scale Space and Artificial Neural NetworksDocumento6 páginasRecognition Using Curvature Scale Space and Artificial Neural NetworksMuthu Vijay DeepakAún no hay calificaciones
- An Algebraic Taxonomy For Locus Computation in Dynamic GeometryDocumento12 páginasAn Algebraic Taxonomy For Locus Computation in Dynamic Geometryloubna BoutayibAún no hay calificaciones
- Chapter 7Documento49 páginasChapter 7armin2200Aún no hay calificaciones
- Ali Et Al., 2023 (Terkait Aplikasi FPT Di Berbagai Bidang)Documento19 páginasAli Et Al., 2023 (Terkait Aplikasi FPT Di Berbagai Bidang)ajiiib 27Aún no hay calificaciones
- You Only Linearize Once: Alexey Radul, Adam Paszke, Roy Frostig, Matthew J. Johnson, Dougal MaclaurinDocumento29 páginasYou Only Linearize Once: Alexey Radul, Adam Paszke, Roy Frostig, Matthew J. Johnson, Dougal Maclaurins.dedaloscribdAún no hay calificaciones
- Biharmonic Coordinates: Figure 1: Source Shape Deformed Using Various Algorithms by Moving Three Control PointsDocumento12 páginasBiharmonic Coordinates: Figure 1: Source Shape Deformed Using Various Algorithms by Moving Three Control PointsRoi PoranneAún no hay calificaciones
- A Topology-Based Semantic Location Model For IndoorDocumento10 páginasA Topology-Based Semantic Location Model For IndoorRubén ÁguedaAún no hay calificaciones
- 10.1007@3 540 36131 655Documento10 páginas10.1007@3 540 36131 655Shit ShitAún no hay calificaciones
- Support Vector NetworksDocumento25 páginasSupport Vector Networksphani5016Aún no hay calificaciones
- Spatial Pyramid Matching For Scene Category RecognitionDocumento6 páginasSpatial Pyramid Matching For Scene Category RecognitionVaibhav JainAún no hay calificaciones
- On Extracting Skeletons From Binary 3D Images: Conference PaperDocumento6 páginasOn Extracting Skeletons From Binary 3D Images: Conference PaperOana AndradaAún no hay calificaciones
- Learning From Labeled and Unlabeled Data On A Directed GraphDocumento8 páginasLearning From Labeled and Unlabeled Data On A Directed GraphoreskeAún no hay calificaciones
- Guo Beyond Bounding-Box Convex-Hull Feature Adaptation For Oriented and Densely Packed CVPR 2021 PaperDocumento10 páginasGuo Beyond Bounding-Box Convex-Hull Feature Adaptation For Oriented and Densely Packed CVPR 2021 Paperhasnaa EhabAún no hay calificaciones
- Kozlowski Advancements of FPT in MFS Arab J Math 2012Documento20 páginasKozlowski Advancements of FPT in MFS Arab J Math 2012Walter KozlowskiAún no hay calificaciones
- A Comparison of SIFT and Harris Conner Features For Correspondence Points MatchingDocumento4 páginasA Comparison of SIFT and Harris Conner Features For Correspondence Points Matchingrajali gintingAún no hay calificaciones
- Poisson ReconDocumento10 páginasPoisson ReconRaju RaraAún no hay calificaciones
- Graph Kernels: S.V. N. VishwanathanDocumento42 páginasGraph Kernels: S.V. N. VishwanathanDe BungeAún no hay calificaciones
- Machine LearningDocumento46 páginasMachine Learningsussy.rebab19787Aún no hay calificaciones
- Screened Poisson Surface ReconstructionDocumento13 páginasScreened Poisson Surface ReconstructionBrianChenAún no hay calificaciones
- Beyond Bags of Features: Spatial Pyramid Matching For Recognizing Natural Scene CategoriesDocumento8 páginasBeyond Bags of Features: Spatial Pyramid Matching For Recognizing Natural Scene CategoriescrennydaneAún no hay calificaciones
- On Hyperbolic Embeddings in Object DetectionDocumento19 páginasOn Hyperbolic Embeddings in Object DetectioncallmealexAún no hay calificaciones
- Spatial Feat EmbeddingDocumento4 páginasSpatial Feat Embeddingmartin_321Aún no hay calificaciones
- Nonlinear System Identification With Prior Knowledge of The Region of AttractionDocumento19 páginasNonlinear System Identification With Prior Knowledge of The Region of AttractionJessica JaraAún no hay calificaciones
- A Bayesian Framework For Optimal MotionDocumento8 páginasA Bayesian Framework For Optimal MotionRamon Alejandro QuinterosAún no hay calificaciones
- I. Generalized Coordinates IntuitivelyDocumento4 páginasI. Generalized Coordinates IntuitivelyHimangshu BoraAún no hay calificaciones
- Q1. Explain Why SVM Is More Efficient Than Logistic Regression?Documento6 páginasQ1. Explain Why SVM Is More Efficient Than Logistic Regression?vruddhiAún no hay calificaciones
- GDBSCANDocumento30 páginasGDBSCANkkoushikgmailcomAún no hay calificaciones
- Coordinated Motion Planning: Reconfiguring A Swarm of Labeled Robots With Bounded StretchDocumento32 páginasCoordinated Motion Planning: Reconfiguring A Swarm of Labeled Robots With Bounded StretchjayaheAún no hay calificaciones
- Support Vector NetworkDocumento25 páginasSupport Vector NetworkatollorigidoAún no hay calificaciones
- Segmentation 04Documento11 páginasSegmentation 04KumarPatraAún no hay calificaciones
- Neural Conservation Laws: A Divergence-Free Perspective: Hornik Et Al. 1989 Schroeder and Lube 2017Documento21 páginasNeural Conservation Laws: A Divergence-Free Perspective: Hornik Et Al. 1989 Schroeder and Lube 2017jpnietolsAún no hay calificaciones
- Learning Augmented Joint-Space Task-Oriented Dynamical Systems: A Linear Parameter Varying and Synergetic Control ApproachDocumento8 páginasLearning Augmented Joint-Space Task-Oriented Dynamical Systems: A Linear Parameter Varying and Synergetic Control ApproachAghiles ArdjalAún no hay calificaciones
- Artificial Neural Networks Unit 5: Radial Basis Function Networks Cover'S Theorem On The Separability of PatternsDocumento14 páginasArtificial Neural Networks Unit 5: Radial Basis Function Networks Cover'S Theorem On The Separability of Patternsrashbari mAún no hay calificaciones
- Scale Invariant Feature Transfrom: A Seminar OnDocumento8 páginasScale Invariant Feature Transfrom: A Seminar OnHemanthkumar TAún no hay calificaciones
- 2012-Robust PCA Via Outlier PursuitDocumento18 páginas2012-Robust PCA Via Outlier PursuitHongqing YuAún no hay calificaciones
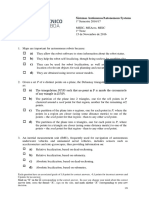
- Sistemas Autonomos Teste 1Documento6 páginasSistemas Autonomos Teste 1Leonor SilvaAún no hay calificaciones
- p117 AndoniDocumento6 páginasp117 Andonimatthewriley123Aún no hay calificaciones
- Modeling Multi-Object Spatial Relationships For Satellite Image Database Indexing and RetrievalDocumento10 páginasModeling Multi-Object Spatial Relationships For Satellite Image Database Indexing and Retrievalharendra_kishoreAún no hay calificaciones
- Ann Trans 2005Documento8 páginasAnn Trans 2005BibodiAún no hay calificaciones
- Chapter 5Documento14 páginasChapter 5bhavyaAún no hay calificaciones
- Trinkle Rolling Contacts 00614264Documento6 páginasTrinkle Rolling Contacts 00614264sandhyaAún no hay calificaciones
- Build4 PDFDocumento13 páginasBuild4 PDFAlla Eddine G CAún no hay calificaciones
- W6a Gaussian Process KernelsDocumento6 páginasW6a Gaussian Process KernelszeliawillscumbergAún no hay calificaciones
- Anguelov - CC Nips04Documento8 páginasAnguelov - CC Nips04sigmateAún no hay calificaciones
- Optical Character Recognition: Shilpa Kale (46052) Kanchan Navgire (46122)Documento12 páginasOptical Character Recognition: Shilpa Kale (46052) Kanchan Navgire (46122)Kanchan navgireAún no hay calificaciones
- Isprs Archives XLII 3 2487 2018Documento4 páginasIsprs Archives XLII 3 2487 2018Seven WhiteAún no hay calificaciones
- Visible Surface DetectionDocumento13 páginasVisible Surface DetectionShaurya KapoorAún no hay calificaciones
- 6475 - RAILWAY RESERVATION SYSTEM (2) SIBIok NEW1Documento40 páginas6475 - RAILWAY RESERVATION SYSTEM (2) SIBIok NEW1Athish J MAún no hay calificaciones
- What I Learned Coding X-Wing vs. TIE Fighter: Peter LincroftDocumento40 páginasWhat I Learned Coding X-Wing vs. TIE Fighter: Peter LincroftevandrixAún no hay calificaciones
- Declaration of XXXXXXXXX.: (Redacted) Location in The United States of AmericaDocumento17 páginasDeclaration of XXXXXXXXX.: (Redacted) Location in The United States of AmericaEnwardCZorhanz94% (31)
- XML Web ServicesDocumento457 páginasXML Web ServicesSoner GönülAún no hay calificaciones
- Access Manager PDFDocumento159 páginasAccess Manager PDFHari Krishna Velpula100% (2)
- Maxicare Maintenance FormDocumento1 páginaMaxicare Maintenance FormEdd Nysha ManguilimotanAún no hay calificaciones
- Yamaha NU1 MIDI Control CodesDocumento6 páginasYamaha NU1 MIDI Control CodesisothermAún no hay calificaciones
- Osama Quantum ComputingDocumento49 páginasOsama Quantum ComputingErvin HodzicAún no hay calificaciones
- WIT-Color Ultra 9600 High Definition Printer User ManualDocumento62 páginasWIT-Color Ultra 9600 High Definition Printer User ManualHerbert M. ZaycoAún no hay calificaciones
- 11 Descision TreeDocumento25 páginas11 Descision TreeNikita KhandujaAún no hay calificaciones
- Variable Resistor - Types of Variable ResistorDocumento7 páginasVariable Resistor - Types of Variable ResistorJames MukhwanaAún no hay calificaciones
- CDM Series Det SVC ManDocumento109 páginasCDM Series Det SVC ManRaulJoseOleagaFloresAún no hay calificaciones
- Sqlmap Cheatsheet v1.0-SBDDocumento2 páginasSqlmap Cheatsheet v1.0-SBDtalsxAún no hay calificaciones
- P780Documento50 páginasP780Shailesh BhanushaliAún no hay calificaciones
- PDF NBR 13248 2014 Cabos de Potencia e Condutores Isolados Sem Cobertura DLDocumento34 páginasPDF NBR 13248 2014 Cabos de Potencia e Condutores Isolados Sem Cobertura DLAndré LuizAún no hay calificaciones
- IPSW2210P User Manual v3.01Documento31 páginasIPSW2210P User Manual v3.01ayikido noagbodAún no hay calificaciones
- PROJECTDocumento34 páginasPROJECTBiswajit PaulAún no hay calificaciones
- Tablesmith 4.5: RPG Generation ToolDocumento36 páginasTablesmith 4.5: RPG Generation ToolBigBadKeithAún no hay calificaciones
- PETSc Manual PDFDocumento272 páginasPETSc Manual PDFUtkun Erinc MalkocogluAún no hay calificaciones
- Cybercrime Tactics and Techniques: Q3 2018: Provided byDocumento27 páginasCybercrime Tactics and Techniques: Q3 2018: Provided byAndres Felipe CameroAún no hay calificaciones
- NS2 Lab2Documento11 páginasNS2 Lab2Tech Talk Paper PresentationAún no hay calificaciones
- RAN Signaling Analysis Guide (RAN10.0 - 02)Documento245 páginasRAN Signaling Analysis Guide (RAN10.0 - 02)Juan Camilo GalvisAún no hay calificaciones
- HDT334 Specs ENDocumento1 páginaHDT334 Specs ENeynna79Aún no hay calificaciones
- Unit 7Documento7 páginasUnit 7Thao PhanAún no hay calificaciones
- Pythagorean Theorem WorksheetDocumento4 páginasPythagorean Theorem WorksheetKhin Myat MawAún no hay calificaciones
- KZW-2824 ServiceManualDocumento76 páginasKZW-2824 ServiceManualManuel ZablaAún no hay calificaciones
- VAR CopenhagenDocumento16 páginasVAR CopenhagenCLIDERAún no hay calificaciones
- 3AH4 Breaker Cn (油品 P26)Documento29 páginas3AH4 Breaker Cn (油品 P26)kokonut1128Aún no hay calificaciones
- Electronic Control System ComponentsDocumento7 páginasElectronic Control System ComponentsTri WahyuningsihAún no hay calificaciones
- Topic 4.0 STP - Link Aggregation (Part 2)Documento27 páginasTopic 4.0 STP - Link Aggregation (Part 2)abinissri rajamuniswaranAún no hay calificaciones