También podría gustarte
- Compactación EstáticaDocumento7 páginasCompactación EstáticaCarlosAún no hay calificaciones
- JUSTIFICACIÓNDocumento3 páginasJUSTIFICACIÓNCarlosAún no hay calificaciones
- Calculo de Tuberia Por GravedadDocumento5 páginasCalculo de Tuberia Por GravedadCarlosAún no hay calificaciones
- AshtoDocumento3 páginasAshtoCarlosAún no hay calificaciones
- 1020147236Documento122 páginas1020147236Mario Alberto Arevalo RosasAún no hay calificaciones
- PDM (Santa Cruz Itundujia 2014-2016) ActualDocumento131 páginasPDM (Santa Cruz Itundujia 2014-2016) ActualCarlosAún no hay calificaciones
- Practica 1Documento4 páginasPractica 1CarlosAún no hay calificaciones
- Carga RectangularDocumento1 páginaCarga RectangularCarlosAún no hay calificaciones
- Procedimiento de Construccion Ing. Genaro DelgadoDocumento183 páginasProcedimiento de Construccion Ing. Genaro DelgadoFredi Justiniano100% (2)
- Hidrología: Cuenca HidrológicaDocumento61 páginasHidrología: Cuenca HidrológicaCarlosAún no hay calificaciones
- Tabla de Rendimientos de Mano de ObraDocumento8 páginasTabla de Rendimientos de Mano de ObraRosa Angela Perez MartinezAún no hay calificaciones
- Antología de PoemasDocumento1 páginaAntología de PoemasCarlosAún no hay calificaciones
- 1a Parte de La Cumbre de La TierraDocumento21 páginas1a Parte de La Cumbre de La TierraCarlosAún no hay calificaciones
- Revista AmivtacDocumento48 páginasRevista AmivtacVictor Hugo100% (1)
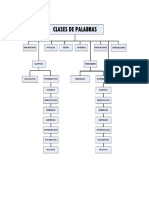
- Tipos de Palabra de La Gramatica Del EspañolDocumento23 páginasTipos de Palabra de La Gramatica Del EspañolCarlosAún no hay calificaciones
- Historia de La HidrologíaDocumento61 páginasHistoria de La HidrologíaCarlosAún no hay calificaciones
- ProblemasCinematicaDelCuerpoRigido PDFDocumento57 páginasProblemasCinematicaDelCuerpoRigido PDFJenifer Lopez SuarezAún no hay calificaciones
- Resistencia de Materiales y Estructuras PDFDocumento541 páginasResistencia de Materiales y Estructuras PDFAquinoAún no hay calificaciones
- Codigo FiscalDocumento13 páginasCodigo FiscalCarlosAún no hay calificaciones
- 02-Tuberia de AbastecimientoDocumento82 páginas02-Tuberia de AbastecimientoIvan Marco Antonio Acosta RojasAún no hay calificaciones
- Carreteras, Calles y Aeropistas - V RODASDocumento413 páginasCarreteras, Calles y Aeropistas - V RODASEdmundo Jaita Cuellar95% (20)
- Práctica 1Documento1 páginaPráctica 1CarlosAún no hay calificaciones
- Baja Por Corte de Personal IMSSDocumento1 páginaBaja Por Corte de Personal IMSSCarlosAún no hay calificaciones
- Planta Arquitectonicas de Un HotelDocumento1 páginaPlanta Arquitectonicas de Un HotelCarlosAún no hay calificaciones
- Roca ígnea, magma y procesos de cristalizaciónDocumento6 páginasRoca ígnea, magma y procesos de cristalizaciónCarlosAún no hay calificaciones
- Anexo 14 - Ejercicios de Reforzamiento 2Documento3 páginasAnexo 14 - Ejercicios de Reforzamiento 2CarlosAún no hay calificaciones
- Reporte de Practica de Laboratorio Suelo 2Documento7 páginasReporte de Practica de Laboratorio Suelo 2CarlosAún no hay calificaciones
- Tablas VigasDocumento9 páginasTablas VigasWaldemar Cepeda Murillo100% (1)
- Soluciones Primer Parcial Mat 1103Documento4 páginasSoluciones Primer Parcial Mat 1103Jorge Sillerico Suárez100% (1)
- FORO DE CONOCIMIENTO Unidad 1Documento4 páginasFORO DE CONOCIMIENTO Unidad 1Escarlint MuñozAún no hay calificaciones
- Tutorial Sobre Superficie de RespuestaDocumento29 páginasTutorial Sobre Superficie de Respuestayamid pismagAún no hay calificaciones
- Límite de funcionesDocumento21 páginasLímite de funcionesDasigo SzkamardaAún no hay calificaciones
- Simplificar Fracc AlgebraicasDocumento5 páginasSimplificar Fracc AlgebraicasDaniel DuranAún no hay calificaciones
- Secciones cónicasDocumento41 páginasSecciones cónicasAndres TorresAún no hay calificaciones
- Aritmetica 55555Documento3 páginasAritmetica 55555honorato pucho mamaniAún no hay calificaciones
- Sistema de Ecuaciones de 2 X 2 Con Coeficientes EnterosDocumento2 páginasSistema de Ecuaciones de 2 X 2 Con Coeficientes EnterosISRAEL DIAZAún no hay calificaciones
- TP N3 - VectoresDocumento2 páginasTP N3 - VectoresGasti LunaAún no hay calificaciones
- Ecuaciones diferenciales de primer ordenDocumento15 páginasEcuaciones diferenciales de primer ordenOmar GomezAún no hay calificaciones
- Aritmetica 1° II BimDocumento40 páginasAritmetica 1° II BimAntonio CastillaAún no hay calificaciones
- Fórmula de Leibniz para El Cálculo de DeterminantesDocumento3 páginasFórmula de Leibniz para El Cálculo de DeterminantesDaniel L. StuardoAún no hay calificaciones
- @preguntero de Algebra 1-12-2019 ActualizadoDocumento16 páginas@preguntero de Algebra 1-12-2019 ActualizadoJesus RiosAún no hay calificaciones
- Actividad 12 - Foro de Discusión Vectores en R y R PDFDocumento3 páginasActividad 12 - Foro de Discusión Vectores en R y R PDFLUIS MOLINAAún no hay calificaciones
- Topicos Sobre Optimizacion de AlgoritmosDocumento8 páginasTopicos Sobre Optimizacion de Algoritmosmanuel de la cruzAún no hay calificaciones
- Tarea - 4 - Unidad - 3 - Estudiante - 5 - Ejercicio - 10Documento4 páginasTarea - 4 - Unidad - 3 - Estudiante - 5 - Ejercicio - 10Jaime Andrés Aragón Giraldo100% (2)
- Qué Es Una Función MatemáticaDocumento6 páginasQué Es Una Función MatemáticaAlex CuentaAún no hay calificaciones
- Jeopardy Calculo Diferencial e IntegralDocumento31 páginasJeopardy Calculo Diferencial e IntegraljahoperiAún no hay calificaciones
- Rango de Una Matriz2Documento4 páginasRango de Una Matriz2Friki10Aún no hay calificaciones
- PSUDocumento4 páginasPSUCamilo ArizaAún no hay calificaciones
- Resolución de variables, ecuaciones, inecuaciones y sistemasDocumento8 páginasResolución de variables, ecuaciones, inecuaciones y sistemasGalo MolinaAún no hay calificaciones
- Transformada FourierDocumento81 páginasTransformada FourierFrancisco FloresAún no hay calificaciones
- Control (LGR)Documento15 páginasControl (LGR)Ktisita SamaniegoAún no hay calificaciones
- EXAMEN 1 Evaluación RESUELTO, Matrices, Determinantes y Sistemas, 2ºBTDocumento7 páginasEXAMEN 1 Evaluación RESUELTO, Matrices, Determinantes y Sistemas, 2ºBTBetrayer100% (1)
- Convolución circular: métodos y propiedadesDocumento2 páginasConvolución circular: métodos y propiedadesSteven Pogo0% (1)
- Trabajo Algebra Valores Propios y Vectores PropiosDocumento59 páginasTrabajo Algebra Valores Propios y Vectores PropiosJosé Francisco Machado100% (2)
- Teoría de GruposDocumento6 páginasTeoría de GruposMarlyn SúchiteAún no hay calificaciones
- Repaso Factorizacion de PolinomiosDocumento8 páginasRepaso Factorizacion de PolinomiosTorres CharlieAún no hay calificaciones
- Analisis de Sistemas Lineales - Mario SalgadoDocumento524 páginasAnalisis de Sistemas Lineales - Mario SalgadoAwert789100% (1)
- Retroalimentaciones ArianaDocumento71 páginasRetroalimentaciones ArianaClaudia Janeth Rivera FuentesAún no hay calificaciones