También podría gustarte
- Lab Manual AI Lab VI SemDocumento34 páginasLab Manual AI Lab VI SemAssoc.Prof, CSE , Vel Tech, ChennaiAún no hay calificaciones
- Lab Manual AI Lab VI SemDocumento50 páginasLab Manual AI Lab VI SemNikhil KumarAún no hay calificaciones
- Hat Universe + NetlessDocumento4 páginasHat Universe + NetlessGLTAún no hay calificaciones
- Lab Manual AI Lab VI SemDocumento34 páginasLab Manual AI Lab VI SemYashika AggarwalAún no hay calificaciones
- AI Practical FileDocumento36 páginasAI Practical FileGourav PatelAún no hay calificaciones
- Phase 6 ReceiverDocumento9 páginasPhase 6 Receiver2vijAún no hay calificaciones
- Midterm 2 CodesDocumento15 páginasMidterm 2 CodessameertardaAún no hay calificaciones
- PythonDocumento10 páginasPythonKalim Ullah MarwatAún no hay calificaciones
- New SkripDocumento9 páginasNew SkripAlexander NolanAún no hay calificaciones
- Kelompok 3 - Latihan 1 Setup Python Dan Aljabar LinierDocumento12 páginasKelompok 3 - Latihan 1 Setup Python Dan Aljabar LinierSatrya Budi PratamaAún no hay calificaciones
- GraphDocumento4 páginasGraphRakesh M BAún no hay calificaciones
- Graph 1Documento4 páginasGraph 1Rakesh M BAún no hay calificaciones
- 6CS4 Mad LabDocumento75 páginas6CS4 Mad Labsubburajs0% (1)
- WriteUp IDSECCONF 2017Documento22 páginasWriteUp IDSECCONF 2017FallCrescentAún no hay calificaciones
- Udacity CS373: Programming A Robotic Car Unit 3: Particle FiltersDocumento36 páginasUdacity CS373: Programming A Robotic Car Unit 3: Particle FiltersgoniscribAún no hay calificaciones
- k214548 AI Lab 3.ipynb - ColaboratoryDocumento4 páginask214548 AI Lab 3.ipynb - Colaboratoryk214548Aún no hay calificaciones
- Ann - Lab - Ipynb - ColaboratoryDocumento7 páginasAnn - Lab - Ipynb - Colaboratorysohan kamsaniAún no hay calificaciones
- Compititive Programming - I ManualDocumento79 páginasCompititive Programming - I ManualArun ChaudhariAún no hay calificaciones
- MA311M Assignment 1 - Code Listing: Animesh Renanse - 180108048 September 2020Documento4 páginasMA311M Assignment 1 - Code Listing: Animesh Renanse - 180108048 September 2020Animesh SinghAún no hay calificaciones
- Experiment No 3 - Gredient Decent in PythonDocumento20 páginasExperiment No 3 - Gredient Decent in PythonSalilAún no hay calificaciones
- HB - Games TestDocumento4 páginasHB - Games TestMarcelino LópezAún no hay calificaciones
- Implementation of Circle, Line and Ellipse Drawing AlgorithmDocumento35 páginasImplementation of Circle, Line and Ellipse Drawing AlgorithmPavithra RajaramAún no hay calificaciones
- (This Post Is Written by Gandhi ManaluDocumento6 páginas(This Post Is Written by Gandhi ManaluSurendra SainiAún no hay calificaciones
- Lab Manual - Soft ComputingDocumento31 páginasLab Manual - Soft ComputingHarsh officialAún no hay calificaciones
- CG EXP12 C28 Mini ProjectDocumento9 páginasCG EXP12 C28 Mini ProjectPrathmesh GaikwadAún no hay calificaciones
- EECS16A: Homework 3: Problem 5: Segway ToursDocumento8 páginasEECS16A: Homework 3: Problem 5: Segway ToursShubham JainAún no hay calificaciones
- Practica 9-2 Operadores GeométricosDocumento8 páginasPractica 9-2 Operadores GeométricosJunior Gomez ContrerasAún no hay calificaciones
- #Include #Include #IncludeDocumento7 páginas#Include #Include #IncludeAbhishekchampAún no hay calificaciones
- Aim L RecordDocumento26 páginasAim L RecordAbhilash AbhiAún no hay calificaciones
- Vedant@4Documento3 páginasVedant@4Vedant AndhaleAún no hay calificaciones
- Algorithm For Intelligent Systems and robotics-STUDEXGUDDocumento83 páginasAlgorithm For Intelligent Systems and robotics-STUDEXGUDHarsh MishraAún no hay calificaciones
- Assignment-1 & 2 (MST) : Submitted by - Name - Shailendra Yadav - (21DR0165)Documento5 páginasAssignment-1 & 2 (MST) : Submitted by - Name - Shailendra Yadav - (21DR0165)Shailendra YadavAún no hay calificaciones
- AI and GPS Based Guidance SystemDocumento2 páginasAI and GPS Based Guidance SystemRafael RañaAún no hay calificaciones
- Homework IntroToDLDocumento3 páginasHomework IntroToDLquyngoc.20032705Aún no hay calificaciones
- 5uebung: 1 Ubung 5 - Computational PhysicsDocumento6 páginas5uebung: 1 Ubung 5 - Computational Physicskillmelorry1627Aún no hay calificaciones
- Par - 1 In-Term Exam - Course 2017/18-Q2Documento7 páginasPar - 1 In-Term Exam - Course 2017/18-Q2JuanAún no hay calificaciones
- Project GuideDocumento3 páginasProject GuidePiyush PilareAún no hay calificaciones
- Day 5 Code and Explanation (Dynamic Programming)Documento18 páginasDay 5 Code and Explanation (Dynamic Programming)shaamidreezAún no hay calificaciones
- Pyqt5 Project 3Documento10 páginasPyqt5 Project 3Yash RajputAún no hay calificaciones
- Exp 4Documento9 páginasExp 4yallasanjay1Aún no hay calificaciones
- CODE8PYDocumento4 páginasCODE8PYDan Geffry IbouliAún no hay calificaciones
- 03 - Movement Dan Steering Behavior - 2Documento16 páginas03 - Movement Dan Steering Behavior - 2WildanAún no hay calificaciones
- Assignment Report #4: Obstacle Avoidance AlgorithmDocumento12 páginasAssignment Report #4: Obstacle Avoidance AlgorithmAnjali DhobaleAún no hay calificaciones
- Parallel Computations & Applications: National Tsing-Hua University 2017, Summer SemesterDocumento75 páginasParallel Computations & Applications: National Tsing-Hua University 2017, Summer SemesterMichael ShiAún no hay calificaciones
- 04 Kwant IntroductionDocumento8 páginas04 Kwant Introductionradhakanta_phy8453Aún no hay calificaciones
- MessageDocumento21 páginasMessagedavidvolintiruvasileAún no hay calificaciones
- For Random Numbers: RandomgeneratorDocumento3 páginasFor Random Numbers: Randomgeneratorsara amerAún no hay calificaciones
- 24 11 2022 - 19 39 15 - CrashDocumento15 páginas24 11 2022 - 19 39 15 - CrashPedro.Aún no hay calificaciones
- Floating Point Multiplier VHDL CodeDocumento3 páginasFloating Point Multiplier VHDL CodeavinashanjaliAún no hay calificaciones
- Experiment - 06Documento2 páginasExperiment - 067amazon.970Aún no hay calificaciones
- Bool Isodd (Int I) (Return ( (I%2) 1) )Documento3 páginasBool Isodd (Int I) (Return ( (I%2) 1) )luiguimoya123Aún no hay calificaciones
- Finding Inverse Matrix Source Code 1Documento9 páginasFinding Inverse Matrix Source Code 1yop_aidilAún no hay calificaciones
- CS1503 AI Lab-1Documento29 páginasCS1503 AI Lab-1dharunAún no hay calificaciones
- Oneccc Detection Assignment Grupo1.Ipynb - ColaboratoryDocumento9 páginasOneccc Detection Assignment Grupo1.Ipynb - ColaboratoryAna VelezAún no hay calificaciones
- Lecture 21Documento138 páginasLecture 21Tev WallaceAún no hay calificaciones
- Lanaro G. - Python High Performance, Second Edition - 2017Documento264 páginasLanaro G. - Python High Performance, Second Edition - 2017lasa greenAún no hay calificaciones
- Report-Part B - Analog Clock For AllDocumento7 páginasReport-Part B - Analog Clock For AllNiraj BavaAún no hay calificaciones
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"De EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Calificación: 2.5 de 5 estrellas2.5/5 (2)
- De Moiver's Theorem (Trigonometry) Mathematics Question BankDe EverandDe Moiver's Theorem (Trigonometry) Mathematics Question BankAún no hay calificaciones
- Inverse Trigonometric Functions (Trigonometry) Mathematics Question BankDe EverandInverse Trigonometric Functions (Trigonometry) Mathematics Question BankAún no hay calificaciones
- Regulador AxialDocumento12 páginasRegulador Axialluis_d_mAún no hay calificaciones
- Thermodynamics and Efficiency of A Heat EngineDocumento2 páginasThermodynamics and Efficiency of A Heat EngineMarc CastroAún no hay calificaciones
- Gen 00 104265 Qa 6050 00514 0000 03 PDFDocumento11 páginasGen 00 104265 Qa 6050 00514 0000 03 PDFchandana kumarAún no hay calificaciones
- Rai Rac-18cDocumento24 páginasRai Rac-18cKyaw San OoAún no hay calificaciones
- European Standards For Control Valve SizingDocumento11 páginasEuropean Standards For Control Valve SizingleotvrdeAún no hay calificaciones
- BSW BS AF BA and Metric Tool Size Equivalents PDFDocumento5 páginasBSW BS AF BA and Metric Tool Size Equivalents PDFZool HilmiAún no hay calificaciones
- GR00003700 55B PDFDocumento22 páginasGR00003700 55B PDFToponari MedveAún no hay calificaciones
- Physics Quiz BeeDocumento22 páginasPhysics Quiz BeeGeorge Isaac McQuiles100% (1)
- @airbus: Component Maintenance Manual With Illustrated Part ListDocumento390 páginas@airbus: Component Maintenance Manual With Illustrated Part Listjoker hotAún no hay calificaciones
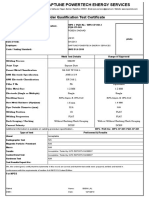
- Welder Qualification Test Certificate: Weld Test Details Range of ApprovalDocumento1 páginaWelder Qualification Test Certificate: Weld Test Details Range of ApprovalRamkunwar YadavAún no hay calificaciones
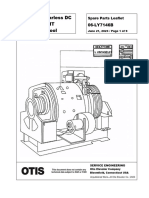
- 06 Ly7146bDocumento9 páginas06 Ly7146bm.omeracarAún no hay calificaciones
- De Walt 1450 - 1250 Radial Arm Saw Assembly InstructionsDocumento6 páginasDe Walt 1450 - 1250 Radial Arm Saw Assembly Instructionsloach71100% (1)
- Especificaciones Rapidas P7690Documento3 páginasEspecificaciones Rapidas P7690ALIB SOUNDAún no hay calificaciones
- Starling EngineDocumento7 páginasStarling EngineLuis ParadaAún no hay calificaciones
- d5c Clutch y Frenos 1Documento4 páginasd5c Clutch y Frenos 1Pepe AlonzoAún no hay calificaciones
- SCH 3A.12 Special Tools &tacklesDocumento3 páginasSCH 3A.12 Special Tools &tacklessrigirisetty208Aún no hay calificaciones
- PHYSICS Matters For GCE O' Level Subject Code:5054: Unit 2: KinematicsDocumento34 páginasPHYSICS Matters For GCE O' Level Subject Code:5054: Unit 2: KinematicsIqra ArshadAún no hay calificaciones
- BNP 20103 Hydraulic JumpDocumento4 páginasBNP 20103 Hydraulic JumpKomputershengalAún no hay calificaciones
- Double Mechanical Seals, Tandem ArrangementDocumento10 páginasDouble Mechanical Seals, Tandem ArrangementViwek MertiyaAún no hay calificaciones
- Pump VP1 ParkerDocumento8 páginasPump VP1 ParkerDian PramadiAún no hay calificaciones
- Hidraulic Hammers Yekn0343Documento12 páginasHidraulic Hammers Yekn0343Andy DellepianeAún no hay calificaciones
- Research: John W. HutchinsonDocumento25 páginasResearch: John W. HutchinsonskcAún no hay calificaciones
- FAULT CODE 3104 - Rail Pressure Relief Valve - OpenDocumento5 páginasFAULT CODE 3104 - Rail Pressure Relief Valve - OpenGarcia Cruz100% (1)
- Toyota BT Traigo 9FBMK20T-35T Chapter 15 (Oil Control Valve) 25 - 03 - 2022 Service TrainingDocumento28 páginasToyota BT Traigo 9FBMK20T-35T Chapter 15 (Oil Control Valve) 25 - 03 - 2022 Service TrainingDennis SteinbuschAún no hay calificaciones
- Especificaciones de Rectificadora de CigueñalDocumento10 páginasEspecificaciones de Rectificadora de CigueñalCR OtinianoAún no hay calificaciones
- Jacton Screw JacksDocumento5 páginasJacton Screw JacksWarren LeeAún no hay calificaciones
- Caesar II Applications GuideDocumento308 páginasCaesar II Applications Guidebanjinolimit8299100% (5)
- Theory of Simple StructuresDocumento544 páginasTheory of Simple StructuresDipu100% (1)
- 3xGE 9E.04 (GT Only)Documento1 página3xGE 9E.04 (GT Only)Ade Okta YurwendraAún no hay calificaciones
- Output 16 TO 1540 KW Pressure Jet Fuel Oil BurnersDocumento16 páginasOutput 16 TO 1540 KW Pressure Jet Fuel Oil BurnersRawan Alwan ZarifAún no hay calificaciones