También podría gustarte
- Manual de Taller Serie 200 Adv Esp PDFDocumento1657 páginasManual de Taller Serie 200 Adv Esp PDFmarcelo7ulate86% (21)
- Tabla de Reacciones Oro y Plata.Documento3 páginasTabla de Reacciones Oro y Plata.Giovanni Guzman75% (4)
- Microprocesadores y Microcontroladores - Marcelo EstévezDocumento199 páginasMicroprocesadores y Microcontroladores - Marcelo EstévezMiguel VásquezAún no hay calificaciones
- Proyecto Termometro DigitalDocumento21 páginasProyecto Termometro DigitalMiguel VásquezAún no hay calificaciones
- Prueba de PlacaDocumento4 páginasPrueba de Placajesus25Aún no hay calificaciones
- 1cableado PractikasDocumento19 páginas1cableado PractikasMejia ElektromekanakoAún no hay calificaciones
- Vasos ComunicantesDocumento5 páginasVasos ComunicantesMiguel VásquezAún no hay calificaciones
- ADMTTHH-FT-3278-JEDHU-V05 - Formato Acta de Compromiso Escuelas de FormacionDocumento2 páginasADMTTHH-FT-3278-JEDHU-V05 - Formato Acta de Compromiso Escuelas de FormacionMiguel VásquezAún no hay calificaciones
- (Lanove-Tin123!) Golden Time Volumen 01 CompletoDocumento145 páginas(Lanove-Tin123!) Golden Time Volumen 01 CompletoMiguel VásquezAún no hay calificaciones
- ContraseñaDocumento1 páginaContraseñaMiguel VásquezAún no hay calificaciones
- U1-Analisis Funcional y EstructuralDocumento8 páginasU1-Analisis Funcional y EstructuralMiguel VásquezAún no hay calificaciones
- Modulo de Diseño de Sistemas de Control 2013-1Documento14 páginasModulo de Diseño de Sistemas de Control 2013-1Miguel VásquezAún no hay calificaciones
- Matematica y SociedadDocumento6 páginasMatematica y SociedadMiguel Vásquez100% (1)
- Tema 632 Contador SíncronoDocumento11 páginasTema 632 Contador Síncronoアルトゥ アルトゥーロAún no hay calificaciones
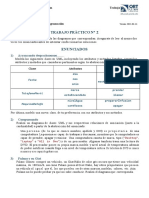
- 2021c1 Ort Fprog Tp2Documento6 páginas2021c1 Ort Fprog Tp2Naco SanchezAún no hay calificaciones
- Suspenciones, Coloides y DisolucionesDocumento1 páginaSuspenciones, Coloides y DisolucionesmilytsaAún no hay calificaciones
- Fts Futbol SalaDocumento35 páginasFts Futbol SalaMario Delgado AlcaldeAún no hay calificaciones
- Intercambiadores de CalorDocumento18 páginasIntercambiadores de CalorJesus Alberto Zamorano SalinasAún no hay calificaciones
- Guia Ejercicios 2 Termo 1 LeyDocumento2 páginasGuia Ejercicios 2 Termo 1 LeyFelipeAndresUgaldeArayaAún no hay calificaciones
- Antologia Control AnalogicoDocumento61 páginasAntologia Control AnalogicoJuan Lopez GarciaAún no hay calificaciones
- Mantenimiento y Análisis de Vibraciones. MARIA PENKOVADocumento12 páginasMantenimiento y Análisis de Vibraciones. MARIA PENKOVADiego Montero100% (1)
- Formulario Práctica 2 Claudia QuezadaDocumento3 páginasFormulario Práctica 2 Claudia Quezadapatricio.ils92Aún no hay calificaciones
- Semana 4.1. Planeamiento de Capacidad.Documento36 páginasSemana 4.1. Planeamiento de Capacidad.Carysel XinitaAún no hay calificaciones
- Marco Legal Funciones Del IngenieroDocumento4 páginasMarco Legal Funciones Del IngenieroLigmar CañasAún no hay calificaciones
- Tarea N°1 MATERIALES DE CONSTRUCCIÓN CompletalaDocumento21 páginasTarea N°1 MATERIALES DE CONSTRUCCIÓN CompletalaCarlos Adrián Cardenas CriolloAún no hay calificaciones
- Con Revestimiento Neopreno 6Mm: M3 Doc No. P014-641Documento1 páginaCon Revestimiento Neopreno 6Mm: M3 Doc No. P014-641Edwin SilvaAún no hay calificaciones
- Tesis Liliana TamayoDocumento248 páginasTesis Liliana TamayoRobertoChávezAún no hay calificaciones
- Guia Ejercicios Planif-SincDocumento24 páginasGuia Ejercicios Planif-SincAndres MurciaAún no hay calificaciones
- Tecnico Salesiano Juan PazminoDocumento0 páginasTecnico Salesiano Juan PazminoManuel GuiracochaAún no hay calificaciones
- Martes Van y TirDocumento60 páginasMartes Van y TirfreddytoapantaAún no hay calificaciones
- GUÍA No 1. INTRODUCCIÓN A LAS MEDICIONES ELÉCTRICASDocumento11 páginasGUÍA No 1. INTRODUCCIÓN A LAS MEDICIONES ELÉCTRICASCamiloAún no hay calificaciones
- Oportunidad Inversion CARBOMEX-4Documento21 páginasOportunidad Inversion CARBOMEX-4GerardoAún no hay calificaciones
- Analisis - 04 Hrs Corralillo 3035 - PMX 9111 (24-Abr-22)Documento1 páginaAnalisis - 04 Hrs Corralillo 3035 - PMX 9111 (24-Abr-22)Jesus HernandezAún no hay calificaciones
- Unidad 3 - Automatas PDFDocumento15 páginasUnidad 3 - Automatas PDFmraleroAún no hay calificaciones
- Programa de Especializacion de Seguridad Industrial en El Sector de HidrocarburosDocumento15 páginasPrograma de Especializacion de Seguridad Industrial en El Sector de HidrocarburosEd MartinezAún no hay calificaciones
- Catalagó de PreciosDocumento1 páginaCatalagó de PreciosClaudia TostaAún no hay calificaciones
- TurbinasDocumento52 páginasTurbinasAudiel Hernandez MayaAún no hay calificaciones
- Trazo y ReplanteoDocumento10 páginasTrazo y ReplanteoMario Nina AlmanzaAún no hay calificaciones
- Osciloscopio DigitalDocumento3 páginasOsciloscopio DigitalCinthiaGladbetLizzetBarbozaBravoAún no hay calificaciones
- Zonas Sísmicas BoliviaDocumento2 páginasZonas Sísmicas BoliviaalvarosantiagoAún no hay calificaciones