También podría gustarte
- Mandala of The Soul A Spiritual ApproachDocumento223 páginasMandala of The Soul A Spiritual Approachnaturalvibes100% (7)
- TensorFlow in 1 Day: Make your own Neural NetworkDe EverandTensorFlow in 1 Day: Make your own Neural NetworkCalificación: 4 de 5 estrellas4/5 (8)
- Deep LearningDocumento58 páginasDeep LearningSirish Venkatagiri100% (5)
- Objective Question (MCQS) On Crime and Criminology-3Rd SetDocumento31 páginasObjective Question (MCQS) On Crime and Criminology-3Rd SetVIJAY KUMARAún no hay calificaciones
- Algorithmic ReasonDocumento289 páginasAlgorithmic Reasonjoakinen100% (1)
- Lec-All Deep Learning CourseworkDocumento639 páginasLec-All Deep Learning CourseworkAnkit ShahAún no hay calificaciones
- Implementation of Virtual Assistant With Sign Language Using Deep Learning and Tensor FlowDocumento4 páginasImplementation of Virtual Assistant With Sign Language Using Deep Learning and Tensor FlowIJRASETPublicationsAún no hay calificaciones
- Fosdem 2018Documento184 páginasFosdem 2018joakinenAún no hay calificaciones
- Deep Reinforcement Learning for Intelligent Decision MakingDocumento47 páginasDeep Reinforcement Learning for Intelligent Decision MakingHarsh AroraAún no hay calificaciones
- Enlivenment Andreas WeberDocumento76 páginasEnlivenment Andreas Webersoto100% (2)
- Deep Learning: Yann Le Cun The Courant Institute of Mathematical Sciences New York UniversityDocumento69 páginasDeep Learning: Yann Le Cun The Courant Institute of Mathematical Sciences New York UniversityRin KimAún no hay calificaciones
- Deep Learning: Yann LecunDocumento58 páginasDeep Learning: Yann LecunAnonymous t4uG4pFdAún no hay calificaciones
- Le Cun SupportDocumento77 páginasLe Cun SupportAngéniolAún no hay calificaciones
- The Future of Ai: Yann LecunDocumento20 páginasThe Future of Ai: Yann LecunEfrain TitoAún no hay calificaciones
- Variational AutoencoderDocumento31 páginasVariational AutoencoderkensaiiAún no hay calificaciones
- INFO AI Ch4Documento90 páginasINFO AI Ch4rojen003Aún no hay calificaciones
- Do Large Language Models Need Sensory Grounding For Meaning and Understanding?Documento38 páginasDo Large Language Models Need Sensory Grounding For Meaning and Understanding?Zakhar KoganAún no hay calificaciones
- Lecun 20201119 Frgejp AiDocumento32 páginasLecun 20201119 Frgejp AiEfrain TitoAún no hay calificaciones
- Yann Le Cun Conference Munich Artificial Intelligence "Autoregressive Models Suck"Documento77 páginasYann Le Cun Conference Munich Artificial Intelligence "Autoregressive Models Suck"Frédéric BardeauAún no hay calificaciones
- Lecun 20201027 AttDocumento72 páginasLecun 20201027 AttEfrain TitoAún no hay calificaciones
- Deep Learning: Data Mining: Advanced AspectsDocumento131 páginasDeep Learning: Data Mining: Advanced AspectsmakeosAún no hay calificaciones
- l1 ML PDFDocumento27 páginasl1 ML PDFjuanagallardo01Aún no hay calificaciones
- DL Tutorial NIPS2015 VisionDocumento41 páginasDL Tutorial NIPS2015 VisionBoyboy BoyboyAún no hay calificaciones
- DL Slides 2Documento162 páginasDL Slides 2ABI RAJESH GANESHA RAJAAún no hay calificaciones
- Bigdata Neural NetworksDocumento144 páginasBigdata Neural NetworksSrinath PittaAún no hay calificaciones
- On Deep LearningDocumento97 páginasOn Deep LearningFoad WMAún no hay calificaciones
- A Study On Real Time Object Detection Using Deep Learning IJERTV11IS050269Documento7 páginasA Study On Real Time Object Detection Using Deep Learning IJERTV11IS050269Anand Balagar [021]Aún no hay calificaciones
- DS - NLPDocumento39 páginasDS - NLPneelamysrAún no hay calificaciones
- DeepLearningWithMATLABSeminar 1hrDocumento93 páginasDeepLearningWithMATLABSeminar 1hrKristian TorresAún no hay calificaciones
- JETIRDV06004Documento3 páginasJETIRDV06004George WelsonAún no hay calificaciones
- DeepFake Video DetectionDocumento22 páginasDeepFake Video Detectionrd723489Aún no hay calificaciones
- 01 Introduction 1Documento71 páginas01 Introduction 1espina0104Aún no hay calificaciones
- Project ConnectDocumento4 páginasProject ConnectJuly Rose ClaveriaAún no hay calificaciones
- 06 Learning SystemsDocumento82 páginas06 Learning Systemssanthi sAún no hay calificaciones
- Journal Publication - Liyew BinyamDocumento7 páginasJournal Publication - Liyew BinyamETechno TricksAún no hay calificaciones
- Grade 11 - Unit 04E.MDocumento2 páginasGrade 11 - Unit 04E.MAsmaAún no hay calificaciones
- L1 - UCLxDeepMind DL2020Documento97 páginasL1 - UCLxDeepMind DL2020Sumir VatsAún no hay calificaciones
- Deep Learning GuideDocumento34 páginasDeep Learning GuideMoataz JabarAún no hay calificaciones
- Multiple Object Detection and Tracking: 1912405@nec - Edu.in 1912036@nec - Edu.in 1912011@nec - Edu.inDocumento7 páginasMultiple Object Detection and Tracking: 1912405@nec - Edu.in 1912036@nec - Edu.in 1912011@nec - Edu.inSRIRAM PAún no hay calificaciones
- 1 Introduction To RLDocumento46 páginas1 Introduction To RLNathaniel SauraAún no hay calificaciones
- 001 IntroDocumento66 páginas001 IntromanikAún no hay calificaciones
- SSRN Id3611339Documento4 páginasSSRN Id3611339Gerald KapinguraAún no hay calificaciones
- Unit 4Documento27 páginasUnit 46644 HaripriyaAún no hay calificaciones
- Lecun 20181015 Ihes Gomax PDFDocumento109 páginasLecun 20181015 Ihes Gomax PDFlauraAún no hay calificaciones
- Orange and Black Illustration International Day of Sign Languages Instagram Post - RA078Documento12 páginasOrange and Black Illustration International Day of Sign Languages Instagram Post - RA078Cubic SectionAún no hay calificaciones
- Deep Learning QuestionDocumento4 páginasDeep Learning Questionkhadija zahoorAún no hay calificaciones
- Opencv Introduction Highgui Basic Operations Face Detection Optical Flow Template Matching Local FeatureDocumento21 páginasOpencv Introduction Highgui Basic Operations Face Detection Optical Flow Template Matching Local FeatureHarish ParuchuriAún no hay calificaciones
- Introduction To Deep Learning: Technical Seminar by Md. Abul Fazl (14261A05A0) CSE DeptDocumento21 páginasIntroduction To Deep Learning: Technical Seminar by Md. Abul Fazl (14261A05A0) CSE DeptpavansfdsfAún no hay calificaciones
- SSL 18 Mar 23 PDFDocumento50 páginasSSL 18 Mar 23 PDFarpan singhAún no hay calificaciones
- TOO4TO Module 7 / Artificial Intelligence and Sustainability: Part 1Documento17 páginasTOO4TO Module 7 / Artificial Intelligence and Sustainability: Part 1TOO4TOAún no hay calificaciones
- IA001 - Introducción IA Inteligencia ArtificialDocumento41 páginasIA001 - Introducción IA Inteligencia ArtificialJimmy Cjuro ApazaAún no hay calificaciones
- Deepfake Detection Techniques: A Review: Neeraj Guhagarkar, Sanjana Desai Swanand Vaishyampayan, Ashwini SaveDocumento10 páginasDeepfake Detection Techniques: A Review: Neeraj Guhagarkar, Sanjana Desai Swanand Vaishyampayan, Ashwini SaveVIVA-TECH IJRIAún no hay calificaciones
- Artificial Intelligence in Object Detection-ReportDocumento6 páginasArtificial Intelligence in Object Detection-ReportDimas PradanaAún no hay calificaciones
- Jeff Dean's Lecture For YC AIDocumento86 páginasJeff Dean's Lecture For YC AICraig Cannon100% (19)
- 2021fall L01 IntroductionDocumento69 páginas2021fall L01 IntroductionM HAMZAAún no hay calificaciones
- Sign Languages - RA078Documento13 páginasSign Languages - RA078Cubic SectionAún no hay calificaciones
- CERN Deep Learning and VisionDocumento72 páginasCERN Deep Learning and VisionNarendra SinghAún no hay calificaciones
- Real TimeObjectDetectionusingYOLOAreviewDocumento7 páginasReal TimeObjectDetectionusingYOLOAreviewAnh Bùi ĐứcAún no hay calificaciones
- FAI 1 IntroductionDocumento39 páginasFAI 1 Introductionzhipengyang0110Aún no hay calificaciones
- How Deep Learning Powers GoogleDocumento69 páginasHow Deep Learning Powers GooglepopopopopoAún no hay calificaciones
- Sign Language Recognition Using Python and OpenCVDocumento22 páginasSign Language Recognition Using Python and OpenCVpradip suryawanshi100% (1)
- 2019 Packt - Hands on Deep Learning Architectures With Python (303)Documento303 páginas2019 Packt - Hands on Deep Learning Architectures With Python (303)Miguel Angel Pardave BarzolaAún no hay calificaciones
- Batch 9 Sec A Review 2.Documento15 páginasBatch 9 Sec A Review 2.Bollam Pragnya 518Aún no hay calificaciones
- Facial Emotion and Object Detection For Visually Impaired Blind Persons IJERTV10IS090108Documento4 páginasFacial Emotion and Object Detection For Visually Impaired Blind Persons IJERTV10IS090108Aayush SachdevaAún no hay calificaciones
- 7 Deep LearningDocumento75 páginas7 Deep LearningSyed Hamza Ibrar GillaniAún no hay calificaciones
- Super8filmmakingguide WhoismattDocumento4 páginasSuper8filmmakingguide WhoismattjoakinenAún no hay calificaciones
- T3CHFEST 515596953367 5624511529 EntradaDocumento2 páginasT3CHFEST 515596953367 5624511529 EntradajoakinenAún no hay calificaciones
- MicroMonsta 2 User Manual Section 2.3Documento36 páginasMicroMonsta 2 User Manual Section 2.3joakinenAún no hay calificaciones
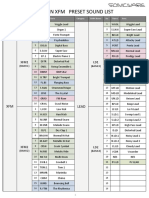
- Liven XFM Preset Sound ListDocumento8 páginasLiven XFM Preset Sound ListjoakinenAún no hay calificaciones
- Return To Updatesthe Latest Hoax in Physics: Eric WeinsteinDocumento8 páginasReturn To Updatesthe Latest Hoax in Physics: Eric WeinsteinjoakinenAún no hay calificaciones
- Ohillips PMC100 Service ManualDocumento10 páginasOhillips PMC100 Service ManualjoakinenAún no hay calificaciones
- Liven XFM Preset Pattern List: Bank No. Name Full Name BPM AuthorDocumento1 páginaLiven XFM Preset Pattern List: Bank No. Name Full Name BPM AuthorjoakinenAún no hay calificaciones
- Searching For Productive Causes in Big Data The Information-Transmission AccountDocumento30 páginasSearching For Productive Causes in Big Data The Information-Transmission AccountjoakinenAún no hay calificaciones
- LIVEN XFM MIDI Implementation Chart: 1 PT - CH 2 T1.Ch - T4.ChDocumento2 páginasLIVEN XFM MIDI Implementation Chart: 1 PT - CH 2 T1.Ch - T4.ChjoakinenAún no hay calificaciones
- Scientific Methods in Computer ScienceDocumento16 páginasScientific Methods in Computer Scienceravg10Aún no hay calificaciones
- M8 Operation ManualDocumento69 páginasM8 Operation ManualjoakinenAún no hay calificaciones
- Inconsciente en Levi-StraussDocumento29 páginasInconsciente en Levi-StraussjoakinenAún no hay calificaciones
- SLOMAN Whats-Information-Fort-A-Machine-Organism PDFDocumento32 páginasSLOMAN Whats-Information-Fort-A-Machine-Organism PDFjoakinenAún no hay calificaciones
- 0446Documento7 páginas0446Kosta NikolicAún no hay calificaciones
- SLOMAN Whats-Information-Fort-A-Machine-Organism PDFDocumento32 páginasSLOMAN Whats-Information-Fort-A-Machine-Organism PDFjoakinenAún no hay calificaciones
- XenDesktop Best PracticesDocumento19 páginasXenDesktop Best PracticesKersic1Aún no hay calificaciones
- Should The Consumption of Animals Be Banned?Documento4 páginasShould The Consumption of Animals Be Banned?joakinenAún no hay calificaciones
- SOREN BRIER Cybersemiotics and The Question of KnowledgeDocumento35 páginasSOREN BRIER Cybersemiotics and The Question of KnowledgejoakinenAún no hay calificaciones
- ZENIL DELAHAYE On The Algorithmic Nature of The WorldDocumento21 páginasZENIL DELAHAYE On The Algorithmic Nature of The WorldjoakinenAún no hay calificaciones
- Eurobsdcon2017 PledgeDocumento26 páginasEurobsdcon2017 PledgejoakinenAún no hay calificaciones
- The Ultimate Citrix XenDesktop 7.x Internals Cheat Sheet2 PDFDocumento19 páginasThe Ultimate Citrix XenDesktop 7.x Internals Cheat Sheet2 PDFjoakinenAún no hay calificaciones
- Phenomenology of IllnessDocumento3 páginasPhenomenology of Illnessjoakinen100% (1)
- Why "Animal (De) Liberation" Survives Early Criticism and Is Pivotal To Public HealthDocumento8 páginasWhy "Animal (De) Liberation" Survives Early Criticism and Is Pivotal To Public HealthjoakinenAún no hay calificaciones
- 100 Billion Data Rows Per Second Culture PDFDocumento20 páginas100 Billion Data Rows Per Second Culture PDFjoakinenAún no hay calificaciones
- 0446Documento7 páginas0446Kosta NikolicAún no hay calificaciones
- Persistent User Scale Out Test With Citrix XenDes Ktop and Atlantis ComputingDocumento31 páginasPersistent User Scale Out Test With Citrix XenDes Ktop and Atlantis ComputingjoakinenAún no hay calificaciones
- Xendesktop Deployment Blueprint PDFDocumento24 páginasXendesktop Deployment Blueprint PDFjoakinenAún no hay calificaciones
- Knowing HowDocumento3 páginasKnowing HowJonathan HechtAún no hay calificaciones
- Rawls a+Theory+of+JusticeDocumento13 páginasRawls a+Theory+of+JusticeateistaAún no hay calificaciones
- Heron's Formula Extra Credit Project ExplainedDocumento2 páginasHeron's Formula Extra Credit Project ExplainedZhiQingAún no hay calificaciones
- Effect of Visual Attributes On Zero Shot Learning Jacob ChandranDocumento20 páginasEffect of Visual Attributes On Zero Shot Learning Jacob Chandranapi-282127378Aún no hay calificaciones
- Activity2_BAGSAC_MMEP611Documento7 páginasActivity2_BAGSAC_MMEP611ivy bagsacAún no hay calificaciones
- MODULE 3 MTB MLE Teaching MethodologiesDocumento20 páginasMODULE 3 MTB MLE Teaching MethodologiesJoyce FuertezAún no hay calificaciones
- Teaching Practicum Handbook: A Guide for Student TeachersDocumento55 páginasTeaching Practicum Handbook: A Guide for Student TeachersIka Tri Yulianti HutamiAún no hay calificaciones
- Kubler-Ross-Change-Curve - Emotional Change PDFDocumento1 páginaKubler-Ross-Change-Curve - Emotional Change PDFbresmanAún no hay calificaciones
- The Department of Education Culture and SportsDocumento6 páginasThe Department of Education Culture and SportsArah Ibrahim-MacakilingAún no hay calificaciones
- Media-Based Arts Daily LessonDocumento3 páginasMedia-Based Arts Daily LessonCharmaine JanorasAún no hay calificaciones
- Documentation (Research)Documento37 páginasDocumentation (Research)Renren RubasAún no hay calificaciones
- Edtpa Lesson PlanDocumento3 páginasEdtpa Lesson Planapi-457201254Aún no hay calificaciones
- Academic Transcript Master's DegreeDocumento3 páginasAcademic Transcript Master's DegreeSam Pacefalm0% (1)
- Year 8 Examination Task OutlineDocumento5 páginasYear 8 Examination Task Outlineapi-360153065Aún no hay calificaciones
- Bus 405Documento2 páginasBus 405Kashish LuthraAún no hay calificaciones
- Horizontal and Vertical Fit in Human Resource Systems: Bgerhart@bus - Wisc.eduDocumento54 páginasHorizontal and Vertical Fit in Human Resource Systems: Bgerhart@bus - Wisc.eduAlexandra NeacsuAún no hay calificaciones
- Language Learning Theories ReviewDocumento2 páginasLanguage Learning Theories ReviewJuan Paz SantosAún no hay calificaciones
- Resume - LarinoDocumento2 páginasResume - LarinoLito LarinoAún no hay calificaciones
- Corrected Field Study Observation SheetDocumento7 páginasCorrected Field Study Observation SheetEllen Grace Dela PeñaAún no hay calificaciones
- EDUC 6145 Project Management in Education and TrainingDocumento19 páginasEDUC 6145 Project Management in Education and TrainingLisa TeschkeAún no hay calificaciones
- Institutional Graduate Outcomes and Program Graduate OutcomeDocumento14 páginasInstitutional Graduate Outcomes and Program Graduate OutcomeRoNnie RonNieAún no hay calificaciones
- The Amazing Versatility of The 5-Paragraph EssayDocumento6 páginasThe Amazing Versatility of The 5-Paragraph EssayAdil ZaheerAún no hay calificaciones
- Seating Arrangement and Question-Asking: Learning Environments Research 2: 249-263, 2000Documento16 páginasSeating Arrangement and Question-Asking: Learning Environments Research 2: 249-263, 2000RyskaAlNurfiantyAún no hay calificaciones
- 6th Grade Udl Rubric Julia GleasonDocumento4 páginas6th Grade Udl Rubric Julia Gleasonapi-439614932Aún no hay calificaciones
- This Study Resource Was: Human Aspects of Strategy ImplementationDocumento9 páginasThis Study Resource Was: Human Aspects of Strategy ImplementationSoumyaranjan BeheraAún no hay calificaciones
- Teachers EfficacyDocumento29 páginasTeachers EfficacyBhannu RamananAún no hay calificaciones
- Quiz #2 Research MethodsDocumento1 páginaQuiz #2 Research MethodsJ'mChoi MiraAún no hay calificaciones