También podría gustarte
- Productividad de La ConstrucciónDocumento27 páginasProductividad de La ConstrucciónFrancisco TelloAún no hay calificaciones
- Articulo Matriz ADocumento22 páginasArticulo Matriz AFrancisco TelloAún no hay calificaciones
- Mies Van Der Rohe y El Rascacielos SeagramDocumento15 páginasMies Van Der Rohe y El Rascacielos SeagramFrancisco TelloAún no hay calificaciones
- Trabajo Seagram PDFDocumento19 páginasTrabajo Seagram PDFFrancisco TelloAún no hay calificaciones
- Gestion de La ConstrucciónDocumento12 páginasGestion de La ConstrucciónFrancisco Tello0% (1)
- Mecanismos de Coordinación de MintzbergDocumento16 páginasMecanismos de Coordinación de MintzbergFrancisco TelloAún no hay calificaciones
- Alambre PlásticoDocumento7 páginasAlambre PlásticoFrancisco TelloAún no hay calificaciones
- Articulo 2Documento7 páginasArticulo 2Francisco TelloAún no hay calificaciones
- Cálculo cortante basal mínimo Vo norma Covenin 1756Documento2 páginasCálculo cortante basal mínimo Vo norma Covenin 1756alexdnl100% (1)
- Fracción de Amortiguamiento CríticoDocumento5 páginasFracción de Amortiguamiento CríticoFrancisco TelloAún no hay calificaciones
- Articulo FinalDocumento10 páginasArticulo FinalFrancisco TelloAún no hay calificaciones
- Proyecto Dovelas 2Documento3 páginasProyecto Dovelas 2Francisco TelloAún no hay calificaciones
- El origen de los sismos: Teorías y descubrimientos claveDocumento24 páginasEl origen de los sismos: Teorías y descubrimientos claveFrancisco TelloAún no hay calificaciones
- Articulo 2Documento7 páginasArticulo 2Francisco TelloAún no hay calificaciones
- Análisis flexión vigas concreto armado hormigón modificado fibrillas recicladasDocumento406 páginasAnálisis flexión vigas concreto armado hormigón modificado fibrillas recicladasFrancisco TelloAún no hay calificaciones
- Articulo FinalDocumento11 páginasArticulo FinalFrancisco TelloAún no hay calificaciones
- Practica 1Documento11 páginasPractica 1Francisco TelloAún no hay calificaciones
- Energías AlternativasDocumento2 páginasEnergías AlternativasFrancisco TelloAún no hay calificaciones
- Modelo SilaboDocumento11 páginasModelo SilaboFrancisco TelloAún no hay calificaciones
- Heteroevaluacio N 1 2015 16Documento1 páginaHeteroevaluacio N 1 2015 16Francisco TelloAún no hay calificaciones
- Poliestireno y PoliuretanoDocumento13 páginasPoliestireno y PoliuretanoFrancisco TelloAún no hay calificaciones
- Unidad I Propiedades de Los FluidosDocumento14 páginasUnidad I Propiedades de Los FluidosFrancisco TelloAún no hay calificaciones
- Heteroevaluacio N 1 2015 16Documento1 páginaHeteroevaluacio N 1 2015 16Francisco TelloAún no hay calificaciones
- Digital 19885 PDFDocumento147 páginasDigital 19885 PDFIvan FmsAún no hay calificaciones
- Centro de Masa de Un Sistema de PartículasDocumento5 páginasCentro de Masa de Un Sistema de PartículasFrancisco TelloAún no hay calificaciones
- SERIAMOS OBJETOSDocumento16 páginasSERIAMOS OBJETOSSueña Desea ObtendrásAún no hay calificaciones
- Clasificación de MatricesDocumento3 páginasClasificación de MatricesLeoAún no hay calificaciones
- Optimiza proyectos y análisis financieroDocumento8 páginasOptimiza proyectos y análisis financieroDaniela ArriagaAún no hay calificaciones
- Aplicaciones útiles para la medicina veterinaria y zootecniaDocumento8 páginasAplicaciones útiles para la medicina veterinaria y zootecniaAnnete RomeroAún no hay calificaciones
- Normas ISO para sistemas de tuberías plásticasDocumento8 páginasNormas ISO para sistemas de tuberías plásticasCesar Joice H. Sanchez VillanuevaAún no hay calificaciones
- Puerto Madryn-Flora de Chubut PDFDocumento9 páginasPuerto Madryn-Flora de Chubut PDFoscarAún no hay calificaciones
- MM ConsignaciónDocumento13 páginasMM ConsignaciónRolando Moya Martinez100% (3)
- La Voz De La Sangre Vampiros 01 - Jemiah JeffersonDocumento190 páginasLa Voz De La Sangre Vampiros 01 - Jemiah Jeffersonvarias tareasAún no hay calificaciones
- Maual Asp NeoDocumento4 páginasMaual Asp NeoCenema CenemaAún no hay calificaciones
- Razones y ProporcionesDocumento9 páginasRazones y ProporcionesChris Yunior RDAún no hay calificaciones
- Tesis Terminado 150817Documento161 páginasTesis Terminado 150817elinhomanAún no hay calificaciones
- Causas, síntomas y prevención de la enfermedad del dengueDocumento8 páginasCausas, síntomas y prevención de la enfermedad del dengueSara Fernandez VeramendiAún no hay calificaciones
- Los MoluscosDocumento3 páginasLos MoluscosAmni JFAún no hay calificaciones
- Informe Promocion Anticipada 2020Documento105 páginasInforme Promocion Anticipada 2020Nardelly olayaAún no hay calificaciones
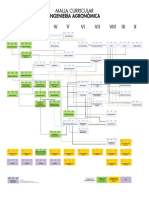
- Malla Curricular Ing Agronómica UNALDocumento1 páginaMalla Curricular Ing Agronómica UNALkmigeAún no hay calificaciones
- MULTIPLAZADocumento2 páginasMULTIPLAZAJung SookAún no hay calificaciones
- Sec PD ArtesVisuales3 AG-1Documento84 páginasSec PD ArtesVisuales3 AG-1Lupita Glez80% (5)
- Volcanes activos en HondurasDocumento6 páginasVolcanes activos en HondurasDilenia0% (1)
- Reglamento de Protección Ambiental DS 019 - 97 ITINCIDocumento38 páginasReglamento de Protección Ambiental DS 019 - 97 ITINCIWilder Casimir Manuelo100% (1)
- Deber n9 UnidoDocumento13 páginasDeber n9 UnidoMely Chalan FloresAún no hay calificaciones
- Analisis de Un CuentoDocumento5 páginasAnalisis de Un Cuentonilsa yamile meloAún no hay calificaciones
- Ensayo Sobre Ética NormativaDocumento3 páginasEnsayo Sobre Ética NormativaSthefan Abad TorresAún no hay calificaciones
- ParkourDocumento8 páginasParkourACTIVAT-EFAún no hay calificaciones
- 1 Caso de LuisDocumento5 páginas1 Caso de Luisgabriela159Aún no hay calificaciones
- MITOSDocumento6 páginasMITOSagenoesteparioAún no hay calificaciones
- Practica 2 TCRDocumento11 páginasPractica 2 TCRanaaluma282Aún no hay calificaciones
- Pe Maco AcDocumento11 páginasPe Maco AcAdrian ToledanoAún no hay calificaciones
- Abdelmumin Aya - Ensayos de Metafisica IslamicaDocumento55 páginasAbdelmumin Aya - Ensayos de Metafisica IslamicaDavid BustamanteAún no hay calificaciones
- GSA: El Riesgo Oculto en Los (Re) Encuentros. Barbara GonyoDocumento11 páginasGSA: El Riesgo Oculto en Los (Re) Encuentros. Barbara GonyoGavi CanoAún no hay calificaciones
- Calculo Depósitos de LíquidoDocumento4 páginasCalculo Depósitos de LíquidoJose Meseguer BañoAún no hay calificaciones