También podría gustarte
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsDe EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsAún no hay calificaciones
- Electrical and Electronic Principles 3 Checkbook: The Checkbook SeriesDe EverandElectrical and Electronic Principles 3 Checkbook: The Checkbook SeriesAún no hay calificaciones
- Double-Sided Linear Induction Motor Control Using Space Vector Pulse Width Modulation TechniqueDocumento8 páginasDouble-Sided Linear Induction Motor Control Using Space Vector Pulse Width Modulation TechniqueDjedidi Med RiadhAún no hay calificaciones
- Implementation of Space Vector Pulse Width Modulation Technique On Three Phase Two Level InverterDocumento11 páginasImplementation of Space Vector Pulse Width Modulation Technique On Three Phase Two Level InverterАлексей ЯмаAún no hay calificaciones
- 7 Art06Documento13 páginas7 Art06yencommsAún no hay calificaciones
- Analysis of Space Vector PWM For Three Phase Inverter and Comparison With SPWMDocumento8 páginasAnalysis of Space Vector PWM For Three Phase Inverter and Comparison With SPWMАлексей ЯмаAún no hay calificaciones
- A Simple State Feedback Linearization Control of Multilevel AsvcDocumento7 páginasA Simple State Feedback Linearization Control of Multilevel AsvcShadAún no hay calificaciones
- Vector Analysis and Control of Advanced Static VAR CompensatorsDocumento8 páginasVector Analysis and Control of Advanced Static VAR CompensatorsNacer LabedAún no hay calificaciones
- Real Time Implementation of Space Vector Pulse Width Modulation Using Arduino DUE BoardDocumento6 páginasReal Time Implementation of Space Vector Pulse Width Modulation Using Arduino DUE BoardDaniel PinedaAún no hay calificaciones
- Research On Permanent Magnet Linear Synchronous Mo PDFDocumento8 páginasResearch On Permanent Magnet Linear Synchronous Mo PDFMilen KolevAún no hay calificaciones
- The Performance Analysis of The Synchronous Rectifiers: October 2007Documento5 páginasThe Performance Analysis of The Synchronous Rectifiers: October 2007davidstooooAún no hay calificaciones
- Low Cost Digital Signal Generation For Driving Space Vector PWM InverterDocumento12 páginasLow Cost Digital Signal Generation For Driving Space Vector PWM InverterJunaid AhmadAún no hay calificaciones
- UPEC2006 Atif RevisedDocumento6 páginasUPEC2006 Atif Revisedhyu2123Aún no hay calificaciones
- Xie 2018Documento8 páginasXie 2018gerson gomesAún no hay calificaciones
- Space Vector ModulationDocumento10 páginasSpace Vector ModulationAmir EzzatAún no hay calificaciones
- A Space Vector Switching Pattern Hysteresis Control Strategy in VIENNA RectifierDocumento10 páginasA Space Vector Switching Pattern Hysteresis Control Strategy in VIENNA RectifierGabriel VilknAún no hay calificaciones
- Comparative Study of Five Level and SeveDocumento12 páginasComparative Study of Five Level and Sevemahmoud yarahmadiAún no hay calificaciones
- Digital Implementation of Space Vector Pulse Width Modulation Technique Using 8-Bit MicrocontrollerDocumento8 páginasDigital Implementation of Space Vector Pulse Width Modulation Technique Using 8-Bit MicrocontrollerahmedAún no hay calificaciones
- Comparison of PWM Modulation Strategies for Four-Leg Voltage Source InverterDocumento9 páginasComparison of PWM Modulation Strategies for Four-Leg Voltage Source InverterTài Nguyễn Minh NhậtAún no hay calificaciones
- A New Mathematical Model and Control of A Three-Phase Ac-Dc Voltage Source ConverterDocumento8 páginasA New Mathematical Model and Control of A Three-Phase Ac-Dc Voltage Source ConverterenmnabilAún no hay calificaciones
- Control y VaiacionDocumento20 páginasControl y VaiacionDarness Castillo RodriguezAún no hay calificaciones
- 70.1 02 PDFDocumento14 páginas70.1 02 PDFyounesAún no hay calificaciones
- The Comparison of Direct and Indirect Matrix Conve-2Documento5 páginasThe Comparison of Direct and Indirect Matrix Conve-2Anshuman MohantyAún no hay calificaciones
- Space-Vector PWM With TMS320C24x/F24x Using Hardware and Software Determined Switching PatternsDocumento44 páginasSpace-Vector PWM With TMS320C24x/F24x Using Hardware and Software Determined Switching PatternsMadusanka WeebeddaAún no hay calificaciones
- 3.2) Artigo - NSPWM - SatyanarayanaDocumento5 páginas3.2) Artigo - NSPWM - SatyanarayanaAndréAún no hay calificaciones
- Andrzej M. Trzynadlowski-Control of Induction Motors (Electrical and Electronic Engineering) (Engineering) (2000)Documento6 páginasAndrzej M. Trzynadlowski-Control of Induction Motors (Electrical and Electronic Engineering) (Engineering) (2000)Ahmet GündoğduAún no hay calificaciones
- Digital Implementation of Space Vector Pulse Width Modulation Technique Using 8-Bit MicrocontrollerDocumento9 páginasDigital Implementation of Space Vector Pulse Width Modulation Technique Using 8-Bit Microcontrollerselcuk inancAún no hay calificaciones
- A Nonlinearity-Compensated All-MOS Voltage-to-Current ConverterDocumento5 páginasA Nonlinearity-Compensated All-MOS Voltage-to-Current ConverterAram ShishmanyanAún no hay calificaciones
- Per-Unitization and Equivalent Circuits: 1.0 Normalization of Voltage EquationsDocumento35 páginasPer-Unitization and Equivalent Circuits: 1.0 Normalization of Voltage EquationsfbhkeAún no hay calificaciones
- Implementation of SVPWM Control On FPGA For Three Phase MATRIX CONVERTERDocumento6 páginasImplementation of SVPWM Control On FPGA For Three Phase MATRIX CONVERTERIDESAún no hay calificaciones
- Modeling and Control of Quasi Z-Source Cascaded H-Bridge Multilevel Inverter For Grid Connected Photovoltaic SystemsDocumento10 páginasModeling and Control of Quasi Z-Source Cascaded H-Bridge Multilevel Inverter For Grid Connected Photovoltaic SystemsWiwid Ayu NitaAún no hay calificaciones
- A Five-Phase Multilevel Space-Vector PWM Algorithm For A Dual-Inverter Supplied DriveDocumento6 páginasA Five-Phase Multilevel Space-Vector PWM Algorithm For A Dual-Inverter Supplied DriveSherif M. DabourAún no hay calificaciones
- Space Vector PWM as Modified SPWM for Simple Analog or Digital ImplementationDocumento44 páginasSpace Vector PWM as Modified SPWM for Simple Analog or Digital ImplementationAravind MohanaveeramaniAún no hay calificaciones
- Seven Level Asymmetric Cascade Inverter With Space Vector PWM Added PR ControlDocumento6 páginasSeven Level Asymmetric Cascade Inverter With Space Vector PWM Added PR ControlAhmad MqdadAún no hay calificaciones
- Space Vector Pulse Width Modulation Based Two Level InverterDocumento6 páginasSpace Vector Pulse Width Modulation Based Two Level InverterSyed Muhammad Sharif NaqviAún no hay calificaciones
- 10-1108_COMPEL-01-2018-0009Documento19 páginas10-1108_COMPEL-01-2018-0009Abo KikiAún no hay calificaciones
- Nirsha2017 PDFDocumento6 páginasNirsha2017 PDFnirshaAún no hay calificaciones
- Closed Loop Control of Hexagram Inverter: G.Renukadevi, K.RajambalDocumento8 páginasClosed Loop Control of Hexagram Inverter: G.Renukadevi, K.Rajambalrenunila100% (1)
- A Transformerless D-STATCOM Based On A Multi-Voltage Cascade Converter Requiring No DC SourcesDocumento8 páginasA Transformerless D-STATCOM Based On A Multi-Voltage Cascade Converter Requiring No DC SourcesManoj BadoniAún no hay calificaciones
- 3 PhaseDocumento27 páginas3 PhaseIZZA JamalAún no hay calificaciones
- Impulse Voltage Generator Modelling Using MATLABDocumento7 páginasImpulse Voltage Generator Modelling Using MATLABKsr AkhilAún no hay calificaciones
- Space Vector Pulse Width Modulation Technique: ArticleDocumento8 páginasSpace Vector Pulse Width Modulation Technique: Articlengoc an nguyenAún no hay calificaciones
- ES4E8 Lab2 22 23Documento12 páginasES4E8 Lab2 22 23金子泰Aún no hay calificaciones
- Direct Torque Control Using Phase Current Reconstruction Algorithm in Induction MotorDocumento6 páginasDirect Torque Control Using Phase Current Reconstruction Algorithm in Induction MotorquocyenkcdAún no hay calificaciones
- Design and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerDocumento12 páginasDesign and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerHaider NeamaAún no hay calificaciones
- Modeling Front-End Converters: and Control of Three-Phase ActiveDocumento6 páginasModeling Front-End Converters: and Control of Three-Phase ActiveAjay BhosaleAún no hay calificaciones
- Fast Response Antiwindup PI Speed Controller of Brushless DC Motor Drive: Modeling, Simulation and Implementation On DSPDocumento13 páginasFast Response Antiwindup PI Speed Controller of Brushless DC Motor Drive: Modeling, Simulation and Implementation On DSPMian AsimAún no hay calificaciones
- Condition Monitoring and Faults Diagnosis For Synchronous Generator Using Neural NetworksDocumento9 páginasCondition Monitoring and Faults Diagnosis For Synchronous Generator Using Neural NetworksMk AlshaearAún no hay calificaciones
- Batch 2Documento19 páginasBatch 2rohith kuruvaAún no hay calificaciones
- Fuzzy Logic Controller Based Three-Phase Shunt Active Power Filter For Compensating Harmonics and Reactive Power Under Unbalanced Mains VoltagesDocumento11 páginasFuzzy Logic Controller Based Three-Phase Shunt Active Power Filter For Compensating Harmonics and Reactive Power Under Unbalanced Mains VoltagesSnehal GajreAún no hay calificaciones
- WTHD and Power Quality Analysis of Space Vector Modulated Voltage Source Inverters For WecsDocumento7 páginasWTHD and Power Quality Analysis of Space Vector Modulated Voltage Source Inverters For Wecsdaiduongxanh14113Aún no hay calificaciones
- A Doubly Grounded Boost Seven Level PV Inverter Topology With Model Predictive ControllerDocumento6 páginasA Doubly Grounded Boost Seven Level PV Inverter Topology With Model Predictive ControllerRodovarAún no hay calificaciones
- Ladders and BridgesDocumento5 páginasLadders and BridgesHamid RajpootAún no hay calificaciones
- Accurate Modeling of Submicron Symmetric-Load Ring VcosDocumento4 páginasAccurate Modeling of Submicron Symmetric-Load Ring VcosJeffAún no hay calificaciones
- L-L FaultsDocumento4 páginasL-L FaultsEngr Saleh AhmadAún no hay calificaciones
- A Vector Controlled Induction Motor Drive With Neural Network Based Space Vector Pulse Width ModulatorDocumento8 páginasA Vector Controlled Induction Motor Drive With Neural Network Based Space Vector Pulse Width ModulatorTiruchengode VinothAún no hay calificaciones
- Paper 2 - PEL20120014 - 2ndDocumento5 páginasPaper 2 - PEL20120014 - 2ndSherif M. DabourAún no hay calificaciones
- Analysis and Control of Commutation Torque Ripple in Four-Switch, Three-Phase Brushless DC Motor DriveDocumento9 páginasAnalysis and Control of Commutation Torque Ripple in Four-Switch, Three-Phase Brushless DC Motor DrivetarnaAún no hay calificaciones
- 10th Eco-Energy and Materials Science and Engineering (EMSES2012) Voltage Control by DQ Frame Technique of SVPWM AC-DC ConverterDocumento10 páginas10th Eco-Energy and Materials Science and Engineering (EMSES2012) Voltage Control by DQ Frame Technique of SVPWM AC-DC ConverterJustin SitohangAún no hay calificaciones
- Direct Control Methods For Matrix Converter and Induction MachineDocumento7 páginasDirect Control Methods For Matrix Converter and Induction Machinesatyam2d2Aún no hay calificaciones
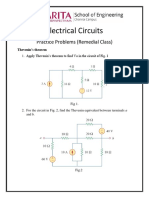
- Electrical Circuits Practice Problems Thevenin's & Norton's Theorems AC AnalysisDocumento7 páginasElectrical Circuits Practice Problems Thevenin's & Norton's Theorems AC AnalysisVenkatesh KumarAún no hay calificaciones
- Concept MapingDocumento1 páginaConcept MapingVenkatesh KumarAún no hay calificaciones
- BMI Broucher-MergedDocumento4 páginasBMI Broucher-MergedVenkatesh KumarAún no hay calificaciones
- DC DC ModellingDocumento5 páginasDC DC ModellingBejoy BabuAún no hay calificaciones
- Dr.M.Venkateshkumar CVDocumento28 páginasDr.M.Venkateshkumar CVVenkatesh Kumar100% (1)
- DC DC ModellingDocumento5 páginasDC DC ModellingBejoy BabuAún no hay calificaciones
- Source Optimisation Using FuzzyDocumento2 páginasSource Optimisation Using FuzzyVenkatesh KumarAún no hay calificaciones
- Power System Control-1Documento6 páginasPower System Control-1Venkatesh KumarAún no hay calificaciones
- IEEE Student Membership: Serving and Preparing Our Next Generation of LeadersDocumento15 páginasIEEE Student Membership: Serving and Preparing Our Next Generation of LeadersVenkatesh KumarAún no hay calificaciones
- Special Session CoDIT18 IoT EnergyDocumento1 páginaSpecial Session CoDIT18 IoT EnergyVenkatesh KumarAún no hay calificaciones
- Ee 2305 Matlab Programming Lab SyallbusDocumento1 páginaEe 2305 Matlab Programming Lab SyallbusVenkatesh KumarAún no hay calificaciones
- Chap 09Documento41 páginasChap 09Imtiax LaghariAún no hay calificaciones
- Programme Learning Outcomes ModifiedDocumento1 páginaProgramme Learning Outcomes ModifiedVenkatesh KumarAún no hay calificaciones
- Course Learning Outcomes (CLO) : Department of Electrical and Electronics EngineeringDocumento6 páginasCourse Learning Outcomes (CLO) : Department of Electrical and Electronics EngineeringVenkatesh KumarAún no hay calificaciones
- Athu Thunbamana InbamithuDocumento50 páginasAthu Thunbamana InbamithuShalomi Jacob64% (14)
- Guide To Bloom's TaxonomyDocumento2 páginasGuide To Bloom's TaxonomyVenkatesh KumarAún no hay calificaciones
- Assessing Course-Level Student Learning OutcomesDocumento45 páginasAssessing Course-Level Student Learning OutcomesVenkatesh KumarAún no hay calificaciones
- Intelligent Control Based EffectiveDocumento6 páginasIntelligent Control Based EffectiveVenkatesh KumarAún no hay calificaciones
- Unit 2 ProblemsDocumento18 páginasUnit 2 ProblemsVenkatesh KumarAún no hay calificaciones
- Intelligent Control Based MPPT For Grid Penetration of Photovoltaic Power SystemDocumento7 páginasIntelligent Control Based MPPT For Grid Penetration of Photovoltaic Power SystemVenkatesh KumarAún no hay calificaciones
- Bse What Is MPPTDocumento2 páginasBse What Is MPPTemerynhoAún no hay calificaciones
- Sse Apsn Quiz PPT BasedDocumento39 páginasSse Apsn Quiz PPT BasedVenkatesh KumarAún no hay calificaciones
- Application Note: Guidance On Selecting and Handling Coaxial RF Connectors Used With Rohde & Schwarz Test EquipmentDocumento19 páginasApplication Note: Guidance On Selecting and Handling Coaxial RF Connectors Used With Rohde & Schwarz Test EquipmentMạnh Huy BùiAún no hay calificaciones
- Schneider Price List (Packard Engineering)Documento14 páginasSchneider Price List (Packard Engineering)Mamun Al-Reja100% (2)
- 05 - 25 KV Traction Power Supply System - RailElectricaDocumento4 páginas05 - 25 KV Traction Power Supply System - RailElectricarajimuruganAún no hay calificaciones
- Assignment - 10: Shyam Shankar H R EE15B127 November 9, 2017Documento15 páginasAssignment - 10: Shyam Shankar H R EE15B127 November 9, 2017Shyam ShankarAún no hay calificaciones
- Distribution VoltageDocumento10 páginasDistribution VoltageIsagani Madrid100% (1)
- Solution Manual For Electric Motor Control 10th EditionDocumento7 páginasSolution Manual For Electric Motor Control 10th EditionAudrey Elliott100% (29)
- DC Motor StartersDocumento6 páginasDC Motor StartersAreeb KhanAún no hay calificaciones
- AC Smart Energy Meter SpecificationDocumento64 páginasAC Smart Energy Meter Specificationreaper mochiAún no hay calificaciones
- Grounding and Bonding For Oil and Gas Drilling orDocumento8 páginasGrounding and Bonding For Oil and Gas Drilling orarwa zeglam100% (1)
- HB100 Microwave Sensor Module DatasheetDocumento2 páginasHB100 Microwave Sensor Module DatasheetJonathanDaysAún no hay calificaciones
- N-Channel Powertrench Mosfet: 30V, 8.5A, 23M General Descriptions FeaturesDocumento6 páginasN-Channel Powertrench Mosfet: 30V, 8.5A, 23M General Descriptions FeaturesjokophpAún no hay calificaciones
- HW10Documento18 páginasHW10Vinay Aanand AanandAún no hay calificaciones
- Installn SS9-2 (1.12) en GB INTDocumento56 páginasInstalln SS9-2 (1.12) en GB INTAurelien ValadeAún no hay calificaciones
- HC-V800 Hc-Wxf1 Hc-Vxf1 HC-VX1: Basic Owner's ManualDocumento52 páginasHC-V800 Hc-Wxf1 Hc-Vxf1 HC-VX1: Basic Owner's ManualalelendoAún no hay calificaciones
- Antenna SpecificationsDocumento3 páginasAntenna SpecificationsRobertAún no hay calificaciones
- D8R PartsDocumento570 páginasD8R PartsMohamed BakheetAún no hay calificaciones
- Dipole Antenna: Dipole AerialDocumento3 páginasDipole Antenna: Dipole AerialBubacarr BahAún no hay calificaciones
- Hybrid PEM Fuel-Cell-Diesel-Solar Power System Design for Electric BoatsDocumento7 páginasHybrid PEM Fuel-Cell-Diesel-Solar Power System Design for Electric BoatsBernardo ReyesAún no hay calificaciones
- 19.DG Inspection ChecklistDocumento1 página19.DG Inspection ChecklistP.M.K anthAún no hay calificaciones
- 32kx8bit CMOS SRAM: HY62256A SeriesDocumento9 páginas32kx8bit CMOS SRAM: HY62256A SeriesHernan KisielAún no hay calificaciones
- Manufacturing Data Sheet: Low Voltage XLPE Cable Design Code: LVIS09AXSFY23.5C120SA001S Date: Rev No.Documento2 páginasManufacturing Data Sheet: Low Voltage XLPE Cable Design Code: LVIS09AXSFY23.5C120SA001S Date: Rev No.rajesh1200Aún no hay calificaciones
- General Radio Company: Operating Instructions FOR TYPE 615 A Heterodyne Frequency MeterDocumento19 páginasGeneral Radio Company: Operating Instructions FOR TYPE 615 A Heterodyne Frequency MeterGeorgeAún no hay calificaciones
- DataKom 116 - USERDocumento4 páginasDataKom 116 - USERKhaleel KhanAún no hay calificaciones
- 2 Phase 60 (NEMA24) Easy Servo Motor Series: General SpecificationsDocumento2 páginas2 Phase 60 (NEMA24) Easy Servo Motor Series: General SpecificationsIonescuTeodoraAún no hay calificaciones
- Basic Electrical Engineering GTU 3110005 (Mahajan) (GTURanker - Com)Documento121 páginasBasic Electrical Engineering GTU 3110005 (Mahajan) (GTURanker - Com)kimuraaegonAún no hay calificaciones
- PDK 205481 Kw26-S5-Fse-4q enDocumento114 páginasPDK 205481 Kw26-S5-Fse-4q enMostafa MagdyAún no hay calificaciones
- MV Drives - Whats NewDocumento132 páginasMV Drives - Whats Newjosenit1787Aún no hay calificaciones
- Irams10Up60A: Pd-94640 RevhDocumento17 páginasIrams10Up60A: Pd-94640 RevhCleiton Da Gama GarciaAún no hay calificaciones
- Rosendal1943 SkinDocumento22 páginasRosendal1943 SkinEdwin CallejasAún no hay calificaciones