También podría gustarte
- Astm c1161 13Documento19 páginasAstm c1161 13Taiana BonadioAún no hay calificaciones
- 현대물리학6판Documento40 páginas현대물리학6판rlaxksrua123Aún no hay calificaciones
- Triode Electronics Aa764 Champ Layout: 5Y3GT 6V6GT 12AX7Documento1 páginaTriode Electronics Aa764 Champ Layout: 5Y3GT 6V6GT 12AX7Sergio RiveroAún no hay calificaciones
- Abb MCBDocumento96 páginasAbb MCBRoberto Montoya ChiwAún no hay calificaciones
- Acutech Equipment Catalogue v8.20 HRDocumento52 páginasAcutech Equipment Catalogue v8.20 HRCaptain AwesomeAún no hay calificaciones
- MOVERS ACADEMY FIRST QUARTER EXAMDocumento3 páginasMOVERS ACADEMY FIRST QUARTER EXAMRain Vicente100% (1)
- Hydrodynamic Journal BearingDocumento4 páginasHydrodynamic Journal BearingEbe Nezer GAún no hay calificaciones
- Theory of MachinesDocumento3 páginasTheory of Machinesjaspreet singh100% (1)
- Immediate Deflection in Concrete BeamsDocumento11 páginasImmediate Deflection in Concrete BeamsSeifeldin Ali MarzoukAún no hay calificaciones
- Unit 16 Plastic AnalysisDocumento34 páginasUnit 16 Plastic AnalysisTam AlasadiAún no hay calificaciones
- George Haller - Transport Barriers and Coherent Structures in Flow Data - Advective, Diffusive, Stochastic and Active Methods-Cambridge University Press (2023)Documento427 páginasGeorge Haller - Transport Barriers and Coherent Structures in Flow Data - Advective, Diffusive, Stochastic and Active Methods-Cambridge University Press (2023)Cesar RosalesAún no hay calificaciones
- Flow in Pipes CompleteDocumento21 páginasFlow in Pipes CompleteSYaz WAni67% (6)
- Heat Exchanger DesignDocumento19 páginasHeat Exchanger DesignMohawk Chavanant Roongchao100% (2)
- Symetrix 528E EsquematicDocumento7 páginasSymetrix 528E EsquematicJoão carlos Júnior100% (1)
- Exercise Matano AnalysisDocumento4 páginasExercise Matano AnalysisInform7105100% (1)
- Nexo Ps - Series PDFDocumento12 páginasNexo Ps - Series PDFArief PrabowoAún no hay calificaciones
- Blaupunkt BMW cd23 (ET)Documento4 páginasBlaupunkt BMW cd23 (ET)Przemo BoguśAún no hay calificaciones
- (S T A R) Rnav M Atko 1A - Orana 1A RWY 15: 7 5 8 T RNS E LDocumento2 páginas(S T A R) Rnav M Atko 1A - Orana 1A RWY 15: 7 5 8 T RNS E LgameplayPSAún no hay calificaciones
- CEE 4476b Winter 2013 Sturm SolutionsDocumento31 páginasCEE 4476b Winter 2013 Sturm SolutionsKarla Isabel Salgado Sánchez100% (1)
- View frames result recordedDocumento1 páginaView frames result recordedpatrickcjh5236Aún no hay calificaciones
- SS 5100aDocumento2 páginasSS 5100aKannan Krishnamurthy100% (1)
- Chapter-5.PDF Charan LangtonDocumento32 páginasChapter-5.PDF Charan Langtonumair rasheedAún no hay calificaciones
- SM G386T1 Tshoo 7 PDFDocumento40 páginasSM G386T1 Tshoo 7 PDFJhonn arcilaAún no hay calificaciones
- Fault List RBS 6000Documento25 páginasFault List RBS 6000Andreea TrenteaAún no hay calificaciones
- EEE3091F Test 1 Questions - 2022Documento3 páginasEEE3091F Test 1 Questions - 2022Student 80Aún no hay calificaciones
- Engineering Science Redspot Question and AnswersDocumento57 páginasEngineering Science Redspot Question and AnswersWellington Tanaka MashokoAún no hay calificaciones
- Xr-Doc Aa83678-20-En Arl Genx (Service Manual) 0520Documento549 páginasXr-Doc Aa83678-20-En Arl Genx (Service Manual) 0520MGRenJc100% (1)
- AE832: Introduction To Robotics Lab: Round 2 Experiments Experiment 4: MTAB Aristo Robot Subject: Batch 8, MTAB Aristo RobotDocumento5 páginasAE832: Introduction To Robotics Lab: Round 2 Experiments Experiment 4: MTAB Aristo Robot Subject: Batch 8, MTAB Aristo RobotPravallika YadavAún no hay calificaciones
- Redmi K30 ProDocumento75 páginasRedmi K30 Projo sephAún no hay calificaciones
- Preface: Q77H2-M User ManualDocumento56 páginasPreface: Q77H2-M User ManualTocel Perez67% (3)
- Design of Inset Feed Microstrip Patch Antenna For Bluetooth ApplicationDocumento3 páginasDesign of Inset Feed Microstrip Patch Antenna For Bluetooth ApplicationAnonymous kw8Yrp0R5rAún no hay calificaciones
- DENON AVR-1905 SchematicDocumento13 páginasDENON AVR-1905 SchematicGuillaume HubertAún no hay calificaciones
- Binary Thermometer CodeDocumento4 páginasBinary Thermometer Codemurthystar100% (1)
- Psychrometric Chart Psychrometric Chart: Normal Temperature I-P Units Sea Level Normal Temperature I-P Units Sea LevelDocumento1 páginaPsychrometric Chart Psychrometric Chart: Normal Temperature I-P Units Sea Level Normal Temperature I-P Units Sea LeveldanielaAún no hay calificaciones
- Nexo GEO CD18 BrochureDocumento2 páginasNexo GEO CD18 BrochureGeovan VayneAún no hay calificaciones
- DIA5ED2130303EN (Web)Documento42 páginasDIA5ED2130303EN (Web)milos ajdacicAún no hay calificaciones
- Daewoo - NC-8913DE - NC-8915DE - Manual Servicio Audio PDFDocumento30 páginasDaewoo - NC-8913DE - NC-8915DE - Manual Servicio Audio PDFjose4445Aún no hay calificaciones
- Forecastin G Methods: Reporter: Lorenzana, Ruth May ODocumento8 páginasForecastin G Methods: Reporter: Lorenzana, Ruth May ORuth LorenzanaAún no hay calificaciones
- DFL 3000aDocumento28 páginasDFL 3000aAndrei Zamfir100% (1)
- Esquema Elétrico 2 Moto G6 Plus XT1926-8Documento46 páginasEsquema Elétrico 2 Moto G6 Plus XT1926-8Rivail ÁvilaAún no hay calificaciones
- ANZSCO List of OccupationsDocumento854 páginasANZSCO List of OccupationsSaravanan RasayaAún no hay calificaciones
- Ampli - Hobby - Power 400 Watts Hi Fi High End Audio Power AmplifierDocumento7 páginasAmpli - Hobby - Power 400 Watts Hi Fi High End Audio Power AmplifiersportredAún no hay calificaciones
- Pre-Lab: 1Dph BBBBBBBBBBBBBBBBBBBBBBBBBB ,' BBBBBBBBBBBBBB /de 6Hfwlrq BBBBBBBDocumento2 páginasPre-Lab: 1Dph BBBBBBBBBBBBBBBBBBBBBBBBBB ,' BBBBBBBBBBBBBB /de 6Hfwlrq BBBBBBBAhnafHabibKhanAún no hay calificaciones
- Konka K2171taDocumento1 páginaKonka K2171taserkalemtayeAún no hay calificaciones
- Magnetic ProblemsDocumento8 páginasMagnetic ProblemsAsebit Philip100% (1)
- 88E6393X Development Board User ManualDocumento8 páginas88E6393X Development Board User Manualwxzcldw163.comAún no hay calificaciones
- PFC circuit component layout and connectionsDocumento2 páginasPFC circuit component layout and connectionsmauriciobyteAún no hay calificaciones
- FPGA and IP EnclustraCatalogue PDFDocumento68 páginasFPGA and IP EnclustraCatalogue PDFSergeyAún no hay calificaciones
- Emco 325 A7G - V3 PDFDocumento62 páginasEmco 325 A7G - V3 PDFDanielAún no hay calificaciones
- Mcclean ReportDocumento4 páginasMcclean ReportAnilLazyAún no hay calificaciones
- SM-J120H.HZ Galaxy J1 2016Documento8 páginasSM-J120H.HZ Galaxy J1 2016New LeoAún no hay calificaciones
- TDN BrandingDocumento9 páginasTDN BrandingYogo HaryantoAún no hay calificaciones
- RTR Bearing PDFDocumento52 páginasRTR Bearing PDFkamelAún no hay calificaciones
- GA B75M-D3V-Rev.1.1 ăÎÍDocumento1 páginaGA B75M-D3V-Rev.1.1 ăÎÍsỹ QuốcAún no hay calificaciones
- Conveyor installation diagramDocumento2 páginasConveyor installation diagramLuis PurisAún no hay calificaciones
- Frequency-domain Analysis and Design of Control SystemsDocumento39 páginasFrequency-domain Analysis and Design of Control Systemsmstan11Aún no hay calificaciones
- uPASS Target: Installation GuideDocumento40 páginasuPASS Target: Installation GuideMohammed ElsayedAún no hay calificaciones
- 1le1502 2BB03 4aa4Documento3 páginas1le1502 2BB03 4aa4Atlanta Bolivia100% (1)
- Tổng hợp đề PDFDocumento413 páginasTổng hợp đề PDFLê Duy NhậtAún no hay calificaciones
- GA H110M DS2 - 10 - BV BoardviewDocumento2 páginasGA H110M DS2 - 10 - BV BoardviewAnh NguyễnAún no hay calificaciones
- PANELDocumento2 páginasPANELFabian SolanoAún no hay calificaciones
- EE322 LAB3 ReportDocumento6 páginasEE322 LAB3 ReportkynguyenAún no hay calificaciones
- DC Bus Capacitor IntegrityDocumento3 páginasDC Bus Capacitor IntegritysebouelletAún no hay calificaciones
- A 1Documento4 páginasA 1milos ajdacicAún no hay calificaciones
- Gyrotron Power Beams For Defence Applications: October 2016Documento50 páginasGyrotron Power Beams For Defence Applications: October 2016Gautam Srivastava100% (1)
- BLPM DCM - Unit IVDocumento41 páginasBLPM DCM - Unit IVpviveknaiduAún no hay calificaciones
- Nokia 208 RM-949, RM-956 Schematics - v3.0Documento12 páginasNokia 208 RM-949, RM-956 Schematics - v3.0jsouza souza100% (2)
- 19eng111 Semester I Technical Communication Workbook: Compiled by Amrita School of Engineering Department of EnglishDocumento13 páginas19eng111 Semester I Technical Communication Workbook: Compiled by Amrita School of Engineering Department of EnglishAntonetteAún no hay calificaciones
- Intelligent Inverse Kinematic Control of PDFDocumento12 páginasIntelligent Inverse Kinematic Control of PDFDavid ZambranoAún no hay calificaciones
- 10: Analysis - Topic Questions: Year Series Paper NumberDocumento14 páginas10: Analysis - Topic Questions: Year Series Paper NumberSumaira AliAún no hay calificaciones
- Assignment 20152016 IDocumento19 páginasAssignment 20152016 IVinod VijayanAún no hay calificaciones
- ELTR100 Sec1 InstructorDocumento175 páginasELTR100 Sec1 InstructorVinod VijayanAún no hay calificaciones
- Arduino Based Auto Intensity Control of Street LightsDocumento2 páginasArduino Based Auto Intensity Control of Street LightsVinod VijayanAún no hay calificaciones
- Read Me First.!!!!!!Documento1 páginaRead Me First.!!!!!!Vinod VijayanAún no hay calificaciones
- Higher Algebra - Hall & KnightDocumento593 páginasHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- ScienceDocumento21 páginasScienceSweet EmmeAún no hay calificaciones
- Ehlanzeni District Gr11 Control Test 2024 Marking GuidelinesDocumento8 páginasEhlanzeni District Gr11 Control Test 2024 Marking GuidelinesNhloniey SnowieAún no hay calificaciones
- Bending ThesisDocumento5 páginasBending Thesiselizabethandersonlittlerock100% (2)
- Gunpowder RocketsDocumento4 páginasGunpowder RocketsMartin EcheverriaAún no hay calificaciones
- Agard Ar 345Documento139 páginasAgard Ar 345Kanoe FabrikAún no hay calificaciones
- Projectile Motion Module Q4 Weeks 1 2Documento36 páginasProjectile Motion Module Q4 Weeks 1 2jerry jerryAún no hay calificaciones
- MR Ch09 Trajectory GenerationDocumento28 páginasMR Ch09 Trajectory GenerationandersonAún no hay calificaciones
- Analysis of Pull-Force in Injected PultrusionDocumento28 páginasAnalysis of Pull-Force in Injected PultrusionSabin RautAún no hay calificaciones
- Projectile Motion Equations and SolutionsDocumento32 páginasProjectile Motion Equations and SolutionsAditya SahayAún no hay calificaciones
- GATE Aerospace 2017 Mock Test ResultsDocumento22 páginasGATE Aerospace 2017 Mock Test ResultsphaninderAún no hay calificaciones
- Moments, Levers and Gears 1 QPDocumento21 páginasMoments, Levers and Gears 1 QPdeepheat_008Aún no hay calificaciones
- Open Channel Flow AnalysisDocumento29 páginasOpen Channel Flow AnalysisMD. TANVIR ANJUM JIMAún no hay calificaciones
- Flexural Strength and Deflection Characteristics of High-Strength Concrete Beams With Hybrid FRP and Steel Bar ReinforcementDocumento23 páginasFlexural Strength and Deflection Characteristics of High-Strength Concrete Beams With Hybrid FRP and Steel Bar ReinforcementCu ToànAún no hay calificaciones
- Elementary Statics and DynamicsDocumento15 páginasElementary Statics and DynamicsPooja Bk0% (1)
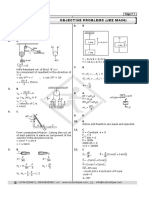
- Friction and constrained motion problems from JEE Main objective questionsDocumento24 páginasFriction and constrained motion problems from JEE Main objective questionsShuvanshu GuptaAún no hay calificaciones
- Strain Gauge Installation GuideDocumento5 páginasStrain Gauge Installation GuideJaya DiAún no hay calificaciones
- Mechanical Engineering GATE/IES Postal Course Books CollectionDocumento3 páginasMechanical Engineering GATE/IES Postal Course Books CollectionJaya Harshit50% (2)
- Katrine PHD ThesisDocumento207 páginasKatrine PHD ThesiszewhiteAún no hay calificaciones
- Assignment 1 ThermodynamicsDocumento1 páginaAssignment 1 ThermodynamicsMarvin BayanayAún no hay calificaciones
- Tension (Pulling) On Top of Ruler Compression (Pushing) Under Middle of RulerDocumento3 páginasTension (Pulling) On Top of Ruler Compression (Pushing) Under Middle of RulerEdward BarberAún no hay calificaciones