También podría gustarte
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2104)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- Apexi V-Afc II ManualDocumento64 páginasApexi V-Afc II ManualsaM aS100% (4)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (895)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- BENZ Me97 Engine Programming-EnDocumento15 páginasBENZ Me97 Engine Programming-EnTaha NoamanAún no hay calificaciones
- Tunning of Standalone ECUDocumento31 páginasTunning of Standalone ECUGalih Kakung100% (1)
- Cell Site DesignDocumento37 páginasCell Site DesignRina Dwi YunitasariAún no hay calificaciones
- Spare Part List 7700 - SM - DOC2042197 - 1 PDFDocumento139 páginasSpare Part List 7700 - SM - DOC2042197 - 1 PDFd_abdosAún no hay calificaciones
- BS 6231Documento15 páginasBS 6231keyurAún no hay calificaciones
- Numerical On 3 Phase Induction MotorDocumento1 páginaNumerical On 3 Phase Induction MotorAnonymous m8oCtJBAún no hay calificaciones
- 52 EE 2 1 Sarbendu Chakraborty: Name University Roll No. Department Semester YearDocumento36 páginas52 EE 2 1 Sarbendu Chakraborty: Name University Roll No. Department Semester YearAnonymous m8oCtJBAún no hay calificaciones
- 1Documento2 páginas1Anonymous m8oCtJBAún no hay calificaciones
- Legal and Ethical Steps: Productive Entrepreneurship & StartupDocumento34 páginasLegal and Ethical Steps: Productive Entrepreneurship & StartupAnonymous m8oCtJBAún no hay calificaciones
- Market Research 2Documento82 páginasMarket Research 2Anonymous m8oCtJBAún no hay calificaciones
- Asst. Innovation DirectorDocumento24 páginasAsst. Innovation DirectorAnonymous m8oCtJBAún no hay calificaciones
- Substation On 23/09/2019 (Monday) - Sl. No. Name Class Roll NoDocumento1 páginaSubstation On 23/09/2019 (Monday) - Sl. No. Name Class Roll NoAnonymous m8oCtJBAún no hay calificaciones
- Narula Institute of Technology: 2017 High Voltage Transmission SystemDocumento2 páginasNarula Institute of Technology: 2017 High Voltage Transmission SystemAnonymous m8oCtJBAún no hay calificaciones
- Progress Report: Indian Institute of Technology (Ism), Dhanbad. Department of Electrical EngineeringDocumento16 páginasProgress Report: Indian Institute of Technology (Ism), Dhanbad. Department of Electrical EngineeringAnonymous m8oCtJBAún no hay calificaciones
- PSM 102 Set2Documento2 páginasPSM 102 Set2Anonymous m8oCtJBAún no hay calificaciones
- CRITERION 4 .5 Student ChapterDocumento8 páginasCRITERION 4 .5 Student ChapterAnonymous m8oCtJBAún no hay calificaciones
- Performance of Optical Microring Resonator As Multiplexer and All-Optical Logic Shifter in Z-DomainDocumento12 páginasPerformance of Optical Microring Resonator As Multiplexer and All-Optical Logic Shifter in Z-DomainAnonymous m8oCtJBAún no hay calificaciones
- Core A Araujo 2016Documento11 páginasCore A Araujo 2016Anonymous m8oCtJBAún no hay calificaciones
- Ranjan 2017Documento11 páginasRanjan 2017Anonymous m8oCtJBAún no hay calificaciones
- Theoretical Analysis Triple-Coupler Ring-B Ased Optical Guided-Wave ResonatorDocumento10 páginasTheoretical Analysis Triple-Coupler Ring-B Ased Optical Guided-Wave ResonatorAnonymous m8oCtJBAún no hay calificaciones
- Simple Linear RegressionDocumento33 páginasSimple Linear RegressionAnonymous m8oCtJBAún no hay calificaciones
- A1800 Meter Installation Instructions PDFDocumento12 páginasA1800 Meter Installation Instructions PDFandresAún no hay calificaciones
- 309 Hobart GPU 400 600 Sept 2015Documento2 páginas309 Hobart GPU 400 600 Sept 2015ReginaldoAún no hay calificaciones
- 511Documento3 páginas511bharath1024Aún no hay calificaciones
- Treadles (EU)Documento1 páginaTreadles (EU)Haris AhmadAún no hay calificaciones
- Ia Ha 2Documento4 páginasIa Ha 2Er Shubham RaksheAún no hay calificaciones
- Computer Organization and Architecture: Kau Cpcs 214 2008Documento1 páginaComputer Organization and Architecture: Kau Cpcs 214 2008Arghyadeep SarkarAún no hay calificaciones
- EN FANOXTD MANU SIA OCEFSecondaryDist SIAB-SPECIFIC-CT R032Documento114 páginasEN FANOXTD MANU SIA OCEFSecondaryDist SIAB-SPECIFIC-CT R032arolnAún no hay calificaciones
- Chapter 2Documento35 páginasChapter 2RhusharvinAún no hay calificaciones
- FR D720 2.2K Mitsubishi PDFDocumento32 páginasFR D720 2.2K Mitsubishi PDFVladimir MartynovAún no hay calificaciones
- Weidmuller PRO RTD Signal Isolators ConvertersDocumento3 páginasWeidmuller PRO RTD Signal Isolators ConvertersFernando NunesAún no hay calificaciones
- T500 DatasheetDocumento436 páginasT500 Datasheetbraxton_millerAún no hay calificaciones
- Opal Generator Annunciator - Turbine V1 - Rev CDocumento35 páginasOpal Generator Annunciator - Turbine V1 - Rev CRaj ChavanAún no hay calificaciones
- هندسة قوى كهربية دكتور عادل2016Documento178 páginasهندسة قوى كهربية دكتور عادل2016AHMED BAKRAún no hay calificaciones
- Total Kebutuhan KabelDocumento8 páginasTotal Kebutuhan KabelTaufiq HidayatAún no hay calificaciones
- Single-Phase SSR With Detachable Heatsink: SR1 SeriesDocumento2 páginasSingle-Phase SSR With Detachable Heatsink: SR1 Seriestechnical supportAún no hay calificaciones
- GK 700Documento2 páginasGK 700sterAún no hay calificaciones
- Advanced Data Communication For M.tech Communication SystemsDocumento1 páginaAdvanced Data Communication For M.tech Communication Systemssrinath02Aún no hay calificaciones
- 3 DAD-N-103 Relay SettingsDocumento24 páginas3 DAD-N-103 Relay SettingsEagle AgilityAún no hay calificaciones
- Color Sensor Module User GuideDocumento6 páginasColor Sensor Module User GuideSyrilleAún no hay calificaciones
- Product Data: Fx4D Comfortt Series Fan Coil Sizes 019 Thru 061Documento16 páginasProduct Data: Fx4D Comfortt Series Fan Coil Sizes 019 Thru 061Victor OrtegaAún no hay calificaciones
- Ema (Sept 2023)Documento21 páginasEma (Sept 2023)huskyjackAún no hay calificaciones
- Cavity Quantum Electrodynamics For Superconducting Electrical Circuits - An Architecture For Quantum ComputationDocumento14 páginasCavity Quantum Electrodynamics For Superconducting Electrical Circuits - An Architecture For Quantum ComputationHuỳnh NguyênAún no hay calificaciones
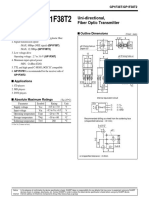
- GP1F38TDocumento5 páginasGP1F38TJosé SCOURNEAUAún no hay calificaciones
- Unit-III Radio Production and Transmission Process: Lesson 4 Recording, Broadcasting and TroubleshootingDocumento14 páginasUnit-III Radio Production and Transmission Process: Lesson 4 Recording, Broadcasting and TroubleshootingpariAún no hay calificaciones