También podría gustarte
- Latest Achievements in Gunfire Detection Systems: J. Millet and B. BaligandDocumento14 páginasLatest Achievements in Gunfire Detection Systems: J. Millet and B. BaligandAnnizar BachriAún no hay calificaciones
- Campo 2008Documento4 páginasCampo 2008Angira BadmaevaAún no hay calificaciones
- Cmos Dcc3240nDocumento8 páginasCmos Dcc3240nEmirhan TosunAún no hay calificaciones
- Terrestrial Laser ScanningDocumento10 páginasTerrestrial Laser ScanningMoise MarianAún no hay calificaciones
- Inspection of Components With The Support of The DronesDocumento6 páginasInspection of Components With The Support of The DronesF. GiacobbeAún no hay calificaciones
- Base PaperDocumento5 páginasBase PaperRoshanAún no hay calificaciones
- Smart Dust: K. Pister, J. Kahn, B. Boser (UCB) S. Morris (MLB)Documento21 páginasSmart Dust: K. Pister, J. Kahn, B. Boser (UCB) S. Morris (MLB)Ashok SutharAún no hay calificaciones
- Instructions For Creating A 3D Laser Scanner Based On A CNC MachineDocumento33 páginasInstructions For Creating A 3D Laser Scanner Based On A CNC MachineKamran ManafzadeAún no hay calificaciones
- Project Review On Ultrasonic Distance Measurement: Prakhar Shrivastava, Praveen Kumar, Ankit TiwariDocumento3 páginasProject Review On Ultrasonic Distance Measurement: Prakhar Shrivastava, Praveen Kumar, Ankit TiwariSuraj UpadhyayAún no hay calificaciones
- Industrial Control Equipment MEMS Training SystemDocumento3 páginasIndustrial Control Equipment MEMS Training Systemmohamed ShabaanAún no hay calificaciones
- Microsonar: Ultrasonic Proximity TransmitterDocumento4 páginasMicrosonar: Ultrasonic Proximity TransmitterSayed Ibrahim GhanemAún no hay calificaciones
- Experiences With Minirobot Platforms in Robotics and AI LaboratoryDocumento5 páginasExperiences With Minirobot Platforms in Robotics and AI LaboratoryEnricCervera100% (1)
- Sna 2011Documento39 páginasSna 2011Fábio CardosoAún no hay calificaciones
- Geometric Centre Tracking of Tagged Objects Using A Low Power Demodulation Smart Vision SensorDocumento11 páginasGeometric Centre Tracking of Tagged Objects Using A Low Power Demodulation Smart Vision Sensorlee_ganeshAún no hay calificaciones
- CMV50000 Ams OSRAMDocumento139 páginasCMV50000 Ams OSRAMSanjay SharmaAún no hay calificaciones
- Avionics Navigation SystemsDocumento86 páginasAvionics Navigation SystemsIman GhAún no hay calificaciones
- Manual ProH 4.6 040206Documento46 páginasManual ProH 4.6 040206maximeAún no hay calificaciones
- Tof System Design Part 2 Optical Design For Time of Flight Depth Sensing CamerasDocumento6 páginasTof System Design Part 2 Optical Design For Time of Flight Depth Sensing Camerassikayek285Aún no hay calificaciones
- Dec50122-Embedded Robotic: Free Powerpoint TemplatesDocumento13 páginasDec50122-Embedded Robotic: Free Powerpoint TemplatesBewAún no hay calificaciones
- 986 1059 PB PDFDocumento6 páginas986 1059 PB PDFmadan kumarAún no hay calificaciones
- ME 597 SECTION 4 SENSORSDocumento136 páginasME 597 SECTION 4 SENSORSJEICK HINCAPIE BARRERAAún no hay calificaciones
- Embedded Robotics Note CH 2Documento12 páginasEmbedded Robotics Note CH 2Shavitra 30Aún no hay calificaciones
- Technical Data Sheet: NIR-Online Multipoint SystemDocumento8 páginasTechnical Data Sheet: NIR-Online Multipoint SystemPiee SyafieAún no hay calificaciones
- Mitutoyo - Czujniki Linear Gage - E4174-542-572-575 - 2006 ENDocumento60 páginasMitutoyo - Czujniki Linear Gage - E4174-542-572-575 - 2006 END.T.Aún no hay calificaciones
- Industrial Enhanced-Safety Radio Remote Controls: DescriptionDocumento26 páginasIndustrial Enhanced-Safety Radio Remote Controls: DescriptionDaniel Muñoz HernándezAún no hay calificaciones
- Sbox: Abstract - This Report Shows The Methodology To Develop A CrackDocumento2 páginasSbox: Abstract - This Report Shows The Methodology To Develop A CrackJose PucAún no hay calificaciones
- 3D扫描跟踪仪Scan & Paint 3D PDFDocumento8 páginas3D扫描跟踪仪Scan & Paint 3D PDFSongScribdAún no hay calificaciones
- 2023 International Image Sensors Workshop ProgrammeDocumento6 páginas2023 International Image Sensors Workshop Programmedivevivi334.korAún no hay calificaciones
- XC-ST70/ST70CE XC-ST50/ST50CE XC-ST51/ST51CE XC-ST30/ST30CE: Black-And-White Video Camera ModuleDocumento4 páginasXC-ST70/ST70CE XC-ST50/ST50CE XC-ST51/ST51CE XC-ST30/ST30CE: Black-And-White Video Camera Modulelejojoel321Aún no hay calificaciones
- Earthquake Detector Research PaperDocumento1 páginaEarthquake Detector Research PaperTanya YadavAún no hay calificaciones
- Robotics Application Solved Part Explains Uses of Wrist Compliance SensorsDocumento9 páginasRobotics Application Solved Part Explains Uses of Wrist Compliance SensorsSHAHUL HAMEED.SAún no hay calificaciones
- En - stm32 Eval-Tools PortfolioDocumento22 páginasEn - stm32 Eval-Tools PortfolioVien Quoc NguyenAún no hay calificaciones
- Pothole Detection System Using 2D LiDAR and CameraDocumento3 páginasPothole Detection System Using 2D LiDAR and Camerabmw 2018Aún no hay calificaciones
- VLSI Design of A High-Speed CMOS Image Sensor With In-Situ 2D Programmable ProcessingDocumento6 páginasVLSI Design of A High-Speed CMOS Image Sensor With In-Situ 2D Programmable ProcessingHARITHA JAún no hay calificaciones
- Depth Camera Tehnology Comparison and EvaluationDocumento7 páginasDepth Camera Tehnology Comparison and EvaluationDavidAún no hay calificaciones
- Standard System Physical CharacteristicsDocumento2 páginasStandard System Physical CharacteristicsSupriyo PAún no hay calificaciones
- Inline Profile Measurement: High-Speed 2D/3D Laser ProfilerDocumento36 páginasInline Profile Measurement: High-Speed 2D/3D Laser Profilerdrew.kolukAún no hay calificaciones
- Formation Microscanner/ Sonic: Scientific ApplicationDocumento2 páginasFormation Microscanner/ Sonic: Scientific Applicationabhishek bhardwajAún no hay calificaciones
- Imx290 291lqr FlyerDocumento2 páginasImx290 291lqr FlyerSuroz AwalAún no hay calificaciones
- 3D Motion Sensor Developer's Kit (MDP-A3U9S-DK)Documento4 páginas3D Motion Sensor Developer's Kit (MDP-A3U9S-DK)Banyu GeaAún no hay calificaciones
- P 0349 GB Fixturlaser Exo - Low Res 200130Documento4 páginasP 0349 GB Fixturlaser Exo - Low Res 200130nino16041973Aún no hay calificaciones
- Depth Estimation by Combining Binocular Stereo and MonocularDocumento10 páginasDepth Estimation by Combining Binocular Stereo and Monocular会爆炸的小米NoteAún no hay calificaciones
- Microscope and CameraDocumento1 páginaMicroscope and CameraRahmad AgungAún no hay calificaciones
- Stereo Vision Distance MeasurementDocumento4 páginasStereo Vision Distance MeasurementMichelle BrownAún no hay calificaciones
- Vision meets Robotics DatasetDocumento6 páginasVision meets Robotics Datasettrí nguyễnAún no hay calificaciones
- Seminar IeeeDocumento6 páginasSeminar IeeenikhiAún no hay calificaciones
- AIRIS Vento LT Standard Specifications SN-M230EDocumento13 páginasAIRIS Vento LT Standard Specifications SN-M230Epriyadarshi1977100% (1)
- BE46-150 JupiterJM4Documento16 páginasBE46-150 JupiterJM4Lferchoi IdrovoAún no hay calificaciones
- Time-of-Flight Ranging Sensor With Multitarget Detection: VL53L3CXDocumento35 páginasTime-of-Flight Ranging Sensor With Multitarget Detection: VL53L3CXAravind KandaswamiAún no hay calificaciones
- RS Class 6sensorsDocumento3 páginasRS Class 6sensorsMd. Adilur RahmanAún no hay calificaciones
- 2012 - A Benchmark For The Evaluation of RGB-D SLAM Systems - SturmDocumento8 páginas2012 - A Benchmark For The Evaluation of RGB-D SLAM Systems - SturmRiriAún no hay calificaciones
- 3D Map-Building From RGB-D Data Considering Noise Characteristics of KinectDocumento6 páginas3D Map-Building From RGB-D Data Considering Noise Characteristics of KinectPsycosiado DivertidoAún no hay calificaciones
- Concealed Weapon Detection Using Image ProcessingDocumento5 páginasConcealed Weapon Detection Using Image Processing4F6 Venkata RamanaAún no hay calificaciones
- CR 30-X - Chapter 02 - Functional Description 1.0 PDFDocumento15 páginasCR 30-X - Chapter 02 - Functional Description 1.0 PDFRodolfo RodríguezAún no hay calificaciones
- WESCAM MX-15-0503AA-SpecDocumento2 páginasWESCAM MX-15-0503AA-SpecAIT FARIDAún no hay calificaciones
- MX-15: Rock Solid Flight Proven Multi-Sensor Imaging SystemDocumento2 páginasMX-15: Rock Solid Flight Proven Multi-Sensor Imaging SystemAlex PavloffAún no hay calificaciones
- RM3100 Breakout Board Sales SheetDocumento2 páginasRM3100 Breakout Board Sales Sheetkostya_4524Aún no hay calificaciones
- Udt 3211 Sensor Rev 3.18.1Documento1 páginaUdt 3211 Sensor Rev 3.18.1cikaracakAún no hay calificaciones
- Position Sensing: Angle and Distance Measurement for EngineersDe EverandPosition Sensing: Angle and Distance Measurement for EngineersAún no hay calificaciones
- PyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1De EverandPyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1Aún no hay calificaciones
- ASIO4ALL v2 Instruction ManualDocumento11 páginasASIO4ALL v2 Instruction ManualDanny_Grafix_1728Aún no hay calificaciones
- 3D Controller and Trajectory Generation for QuadrotorsDocumento10 páginas3D Controller and Trajectory Generation for QuadrotorsLeonardo KnuppAún no hay calificaciones
- S RecoverDocumento1 páginaS RecoverLeonardo KnuppAún no hay calificaciones
- ANSYS Mechanical APDL Introductory TutorialsDocumento106 páginasANSYS Mechanical APDL Introductory TutorialsLeonardo Knupp100% (1)
- Quadrotor Simulator PD ControllerDocumento3 páginasQuadrotor Simulator PD ControllerVinoth KumarAún no hay calificaciones
- 2017Documento1 página2017Leonardo KnuppAún no hay calificaciones
- 66Documento1 página66Leonardo KnuppAún no hay calificaciones
- 990Documento1 página990Leonardo KnuppAún no hay calificaciones
- 87Documento1 página87Leonardo KnuppAún no hay calificaciones
- Build DateDocumento3 páginasBuild DateLeonardo KnuppAún no hay calificaciones
- 77Documento1 página77Leonardo KnuppAún no hay calificaciones
- SubtitleDocumento1 páginaSubtitleLeonardo KnuppAún no hay calificaciones
- Lec 13Documento13 páginasLec 13Leonardo KnuppAún no hay calificaciones
- Key Components For Autonomous FlightDocumento6 páginasKey Components For Autonomous FlightLeonardo KnuppAún no hay calificaciones
- Subtitle 2Documento1 páginaSubtitle 2Leonardo KnuppAún no hay calificaciones
- Subtitle 2Documento1 páginaSubtitle 2Leonardo KnuppAún no hay calificaciones
- PIDtutorialDocumento13 páginasPIDtutorialalijnubyAún no hay calificaciones
- ApplicationDocumento7 páginasApplicationLeonardo KnuppAún no hay calificaciones
- GLG Part 1Documento13 páginasGLG Part 1Leonardo KnuppAún no hay calificaciones
- Classical Mechanics MIT 8.01 Course NotesDocumento712 páginasClassical Mechanics MIT 8.01 Course Noteschodu007Aún no hay calificaciones
- QuadrotorsDocumento8 páginasQuadrotorsLeonardo KnuppAún no hay calificaciones
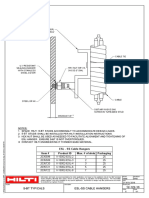
- CAD BIM Typicals ASSET DOC LOC 8373945 PDFDocumento8 páginasCAD BIM Typicals ASSET DOC LOC 8373945 PDFMin KhantAún no hay calificaciones
- DJ320数控说明书 manual of machine PDFDocumento24 páginasDJ320数控说明书 manual of machine PDFRashedul HasanAún no hay calificaciones
- Rough Terrain Crane SpecsDocumento8 páginasRough Terrain Crane SpecsNur Alam SamsieAún no hay calificaciones
- Guia de ProductoDocumento15 páginasGuia de Productoalejandro lopezAún no hay calificaciones
- WagonR - Owner - Manual PDFDocumento245 páginasWagonR - Owner - Manual PDFNikhil JAún no hay calificaciones
- Extended Warranty Program WiFi Temperature & Humidity Data Logger User's GuideDocumento7 páginasExtended Warranty Program WiFi Temperature & Humidity Data Logger User's GuideAEAún no hay calificaciones
- Oil & Gas Industry Standards for Corrosion TestingDocumento7 páginasOil & Gas Industry Standards for Corrosion TestingrajikhannaAún no hay calificaciones
- Reduce Evaporative Emissions with the Prius EVAP SystemDocumento18 páginasReduce Evaporative Emissions with the Prius EVAP Systemlongtrandang5867100% (1)
- 1200 Bunker and Field Rake TM1525Documento476 páginas1200 Bunker and Field Rake TM1525ZeeAún no hay calificaciones
- Training ReportDocumento52 páginasTraining ReportBalachandran AjanthanAún no hay calificaciones
- YearinInfrastructure2018 DL PDFDocumento332 páginasYearinInfrastructure2018 DL PDFLovepreet singhAún no hay calificaciones
- MAN 48 60 Engine ExternDocumento688 páginasMAN 48 60 Engine Externlubangjarum100% (2)
- Fujitsu Inverter LMCA - Design and Technical ManualDocumento53 páginasFujitsu Inverter LMCA - Design and Technical ManualKornelije KovacAún no hay calificaciones
- Hazchem Codes: StorageDocumento3 páginasHazchem Codes: StoragePleaase Annd DontAún no hay calificaciones
- ABS Summary TextDocumento12 páginasABS Summary TextjesusmemAún no hay calificaciones
- Trident 2 PowerscreenDocumento9 páginasTrident 2 PowerscreenRomuald PogorzelczykAún no hay calificaciones
- Selection, Installation and Maintenance of Electrical Apparatus for Hazardous LocationsDocumento29 páginasSelection, Installation and Maintenance of Electrical Apparatus for Hazardous Locationskieran43100% (1)
- Introduction To Wireless NetworksDocumento4 páginasIntroduction To Wireless NetworksDr-Gnaneswar Nadh SatapathiAún no hay calificaciones
- Design of Concrete Gravity DamDocumento26 páginasDesign of Concrete Gravity DamSudharsananPRSAún no hay calificaciones
- Bolt Depot - Bolt Grade Markings and Strength ChartDocumento2 páginasBolt Depot - Bolt Grade Markings and Strength ChartKiara Ticangan Argel100% (1)
- ZUCCHINI Busbar SCP Series Technical Catalog PDFDocumento77 páginasZUCCHINI Busbar SCP Series Technical Catalog PDFJahnValjahnAún no hay calificaciones
- Technical Manual for Midea Split AC UnitsDocumento129 páginasTechnical Manual for Midea Split AC UnitsArlex Ricardo Guillen PetitAún no hay calificaciones
- MTL Product OverviewDocumento56 páginasMTL Product OverviewAries dAún no hay calificaciones
- Is.9523.2000 0 PDFDocumento38 páginasIs.9523.2000 0 PDFVijay Rama RajuAún no hay calificaciones
- Roc 460PC PDFDocumento4 páginasRoc 460PC PDFVictor HernanAún no hay calificaciones
- Overview of Design Aids For Structural Steel FFDocumento42 páginasOverview of Design Aids For Structural Steel FFjohn100% (1)
- Properties and Classification of Fly AshDocumento15 páginasProperties and Classification of Fly AshprabhuwbAún no hay calificaciones
- 6110-6910 SerieDocumento1 página6110-6910 Serieinfo7879Aún no hay calificaciones
- U2S3-4 - Environmental Impact of Textile IndustriesDocumento9 páginasU2S3-4 - Environmental Impact of Textile IndustriesHieu100% (7)
- UT Dallas Syllabus For Mech3350.001.11s Taught by Wooram Park (wxp103020)Documento2 páginasUT Dallas Syllabus For Mech3350.001.11s Taught by Wooram Park (wxp103020)UT Dallas Provost's Technology GroupAún no hay calificaciones