También podría gustarte
- 4R70W Gran Marquis PDFDocumento285 páginas4R70W Gran Marquis PDFRichard Medrano Almaraz67% (9)
- TCIT Test SolucionDocumento7 páginasTCIT Test Solucionmarcos gomezAún no hay calificaciones
- Proyecto para QuinuapataDocumento9 páginasProyecto para QuinuapataFreddy Valdez GarciaAún no hay calificaciones
- Descripcion Traje de Gala LizDocumento1 páginaDescripcion Traje de Gala LizFreddy Valdez GarciaAún no hay calificaciones
- Libro de Obra # 5 - Ing Daniel MerchanDocumento3 páginasLibro de Obra # 5 - Ing Daniel MerchanFreddy Valdez GarciaAún no hay calificaciones
- ReporteAcometidasDocumento7 páginasReporteAcometidasFreddy Valdez GarciaAún no hay calificaciones
- Rider Técnico Fiestas Honorato VásquezDocumento2 páginasRider Técnico Fiestas Honorato VásquezFreddy Valdez GarciaAún no hay calificaciones
- Libro de Obra # 3 ContratoDocumento18 páginasLibro de Obra # 3 ContratoFreddy Valdez GarciaAún no hay calificaciones
- Rider técnico fiestas parroquialización Honorato VásquezDocumento1 páginaRider técnico fiestas parroquialización Honorato VásquezFreddy Valdez GarciaAún no hay calificaciones
- JuniorDocumento10 páginasJuniorFreddy Valdez GarciaAún no hay calificaciones
- Instalación eléctrica en Cañar por $320Documento1 páginaInstalación eléctrica en Cañar por $320Freddy Valdez GarciaAún no hay calificaciones
- OFICIO SELLOS-signedDocumento1 páginaOFICIO SELLOS-signedFreddy Valdez GarciaAún no hay calificaciones
- Libro de Obra # 5 Ing Marco PérezDocumento7 páginasLibro de Obra # 5 Ing Marco PérezFreddy Valdez GarciaAún no hay calificaciones
- Libro de Obra # 4 ProtelincoDocumento1 páginaLibro de Obra # 4 ProtelincoFreddy Valdez GarciaAún no hay calificaciones
- Ordenes Con ObservacionesDocumento1 páginaOrdenes Con ObservacionesFreddy Valdez GarciaAún no hay calificaciones
- Libro de Obra # 3 ContratoDocumento18 páginasLibro de Obra # 3 ContratoFreddy Valdez GarciaAún no hay calificaciones
- Oficio SellosDocumento1 páginaOficio SellosFreddy Valdez GarciaAún no hay calificaciones
- Ordenes Con Observacion 2Documento2 páginasOrdenes Con Observacion 2Freddy Valdez GarciaAún no hay calificaciones
- Libro de Obra # 3 ContratoDocumento18 páginasLibro de Obra # 3 ContratoFreddy Valdez GarciaAún no hay calificaciones
- Series de Sellos Utilizados en El ContratoDocumento1 páginaSeries de Sellos Utilizados en El ContratoFreddy Valdez GarciaAún no hay calificaciones
- Ordenes Con Observacion 2Documento2 páginasOrdenes Con Observacion 2Freddy Valdez GarciaAún no hay calificaciones
- Calle Valdez, Carlos HumbertoDocumento2 páginasCalle Valdez, Carlos HumbertoFreddy Valdez GarciaAún no hay calificaciones
- Primer ParcialDocumento4 páginasPrimer ParcialFreddy Valdez GarciaAún no hay calificaciones
- Deber 1Documento6 páginasDeber 1Freddy Valdez GarciaAún no hay calificaciones
- COMICIONESDocumento3 páginasCOMICIONESFreddy Valdez GarciaAún no hay calificaciones
- Clases Comunicaciones IIDocumento30 páginasClases Comunicaciones IIFreddy Valdez GarciaAún no hay calificaciones
- Cooperativa San Rafael invitada a participar en caravana motorizada del Barrio Divino NiñoDocumento1 páginaCooperativa San Rafael invitada a participar en caravana motorizada del Barrio Divino NiñoFreddy Valdez GarciaAún no hay calificaciones
- COMICIONESDocumento3 páginasCOMICIONESFreddy Valdez GarciaAún no hay calificaciones
- Proyecto 5 SDocumento14 páginasProyecto 5 SluisAún no hay calificaciones
- Honorato VázquezDocumento1 páginaHonorato VázquezFreddy Valdez GarciaAún no hay calificaciones
- Programa 2019Documento2 páginasPrograma 2019Freddy Valdez GarciaAún no hay calificaciones
- Programa 2019Documento2 páginasPrograma 2019Freddy Valdez GarciaAún no hay calificaciones
- Citas VancouverDocumento14 páginasCitas VancouvermaveguitaAún no hay calificaciones
- Unidad III. La Psicología Como CienciaDocumento14 páginasUnidad III. La Psicología Como CienciaLilian RomeroAún no hay calificaciones
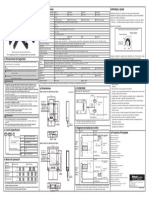
- Autonics Bup Esp ManualDocumento1 páginaAutonics Bup Esp ManualfchumpitazAún no hay calificaciones
- Impacto en La Salud Mental Por El Derrame de Petroleo en Las Costas Del Peru 2022Documento8 páginasImpacto en La Salud Mental Por El Derrame de Petroleo en Las Costas Del Peru 2022ELIAS ENOC SAMANEZ GOMEROAún no hay calificaciones
- Cuestionario TALLER DE LA ADMINISTRACION GERENCIALDocumento6 páginasCuestionario TALLER DE LA ADMINISTRACION GERENCIALGarcia Arias Jonathan DavidAún no hay calificaciones
- Proyecto Integrador Técnicas de Administración de PersonalDocumento7 páginasProyecto Integrador Técnicas de Administración de Personalestefany rodriguezAún no hay calificaciones
- Diferencias entre levantamientos topográficos y altimétricosDocumento2 páginasDiferencias entre levantamientos topográficos y altimétricosJohana TejadaAún no hay calificaciones
- El Fenómeno Del Niño y Los Recursos Del Mar PeruanoDocumento26 páginasEl Fenómeno Del Niño y Los Recursos Del Mar PeruanoMadeleynne Saldarriaga MejiasAún no hay calificaciones
- 6 SESION La Globalización, Internet y Redes SocialesDocumento3 páginas6 SESION La Globalización, Internet y Redes SocialesTania Cerna NarcisoAún no hay calificaciones
- Comunicado Del 20may2021 Actualizacion Datos PasivocolDocumento15 páginasComunicado Del 20may2021 Actualizacion Datos PasivocolÂ'łëjő M'ōřēnôAún no hay calificaciones
- Naval de Nasa PDFDocumento133 páginasNaval de Nasa PDFdaniilAún no hay calificaciones
- Ensayo. Estado e Inversion PublicaDocumento7 páginasEnsayo. Estado e Inversion PublicaDiego Campos ParedesAún no hay calificaciones
- MANUAL USUARIO Rayto 7200Documento50 páginasMANUAL USUARIO Rayto 7200NOLLY PIO80% (5)
- Modelos para La Toma de DecisionesDocumento24 páginasModelos para La Toma de DecisionesFreddy Huayta MezaAún no hay calificaciones
- Manual de Seguridad e Higiene - AnkyDocumento11 páginasManual de Seguridad e Higiene - AnkyAngel FuentesAún no hay calificaciones
- Formato Reporte Incidente, Accidente de Trabajo y Enfermdad P.Documento1 páginaFormato Reporte Incidente, Accidente de Trabajo y Enfermdad P.CarlosAún no hay calificaciones
- Transporte, Almacenamiento de Cloro en Plantas de Tratamiento de AguaDocumento66 páginasTransporte, Almacenamiento de Cloro en Plantas de Tratamiento de AguaJesús HernándezAún no hay calificaciones
- Rotulación de SeguridadDocumento5 páginasRotulación de SeguridadRubén Guerra LozanoAún no hay calificaciones
- 7 Libros Recomendados para Costos y Presupuestos - CivilGeeksDocumento9 páginas7 Libros Recomendados para Costos y Presupuestos - CivilGeeksJarlen Jhennrry Alba VillarroelAún no hay calificaciones
- Instalar Canaima 3Documento18 páginasInstalar Canaima 3Kevin Gabriel Cisnero AlvaradoAún no hay calificaciones
- Órgano Judicial Comparación Entre Gobiernos DiapositivasDocumento10 páginasÓrgano Judicial Comparación Entre Gobiernos DiapositivasVanelizRodríguezAún no hay calificaciones
- Tesis Seguridad Privada 4973Documento33 páginasTesis Seguridad Privada 4973jvallejo810125Aún no hay calificaciones
- Curso Diseño Web HTMLDocumento6 páginasCurso Diseño Web HTMLMichkayla Cruz Franco0% (1)
- Lifestyle Meal Plan - ESDocumento10 páginasLifestyle Meal Plan - ESfootpeidoAún no hay calificaciones
- Ev. 2 - Eq. 7 - Procesos de CalidadDocumento12 páginasEv. 2 - Eq. 7 - Procesos de Calidadandrea reyesAún no hay calificaciones
- Propuesta de Protocolo Nacional de Monitoreo de Calidad Del Aire 04.12.2...Documento76 páginasPropuesta de Protocolo Nacional de Monitoreo de Calidad Del Aire 04.12.2...CASTILLO LIÑAN TANIA LESLIEAún no hay calificaciones
- El Sistema SolarDocumento3 páginasEl Sistema SolarGrover Yamil Flores CórdovaAún no hay calificaciones
- Universidad Nacional de CajamarcaDocumento99 páginasUniversidad Nacional de CajamarcaAndrés MedinaAún no hay calificaciones