También podría gustarte
- Special Survey InstrumentsDocumento9 páginasSpecial Survey InstrumentsN AlamAún no hay calificaciones
- What Is A Total StationDocumento13 páginasWhat Is A Total StationEr Santosh KaparAún no hay calificaciones
- Is TheodoliteDocumento5 páginasIs TheodoliteHARSH HAMIRANIAún no hay calificaciones
- Total StationDocumento13 páginasTotal StationEr Santosh Kapar100% (1)
- Chapter 09 Total StationDocumento40 páginasChapter 09 Total StationSuhasini PranayAún no hay calificaciones
- Unit 5 Modern Surveying Equipment: StructureDocumento19 páginasUnit 5 Modern Surveying Equipment: StructureSeble GetachewAún no hay calificaciones
- Unit III Total StationDocumento15 páginasUnit III Total StationManikandan.R.KAún no hay calificaciones
- Total StationDocumento14 páginasTotal StationAswathy M N67% (3)
- 2what Is A Total StationDocumento4 páginas2what Is A Total StationbbnAún no hay calificaciones
- 5 Types of Land Surveying EventsDocumento1 página5 Types of Land Surveying EventsMARC KEN LIMAún no hay calificaciones
- Total Station PDFDocumento47 páginasTotal Station PDFkkrao100% (1)
- Total StationDocumento47 páginasTotal StationYogendra PatilAún no hay calificaciones
- KdulDocumento47 páginasKdulWasyraf WroslizamAún no hay calificaciones
- Unit 5Documento19 páginasUnit 5RAVAL RAHULAún no hay calificaciones
- Morden Surveying InstrumentsDocumento11 páginasMorden Surveying InstrumentsmohitghostAún no hay calificaciones
- Total Station and Its ApplicationsDocumento4 páginasTotal Station and Its ApplicationsBrahmaji KommojuAún no hay calificaciones
- Total Station 2016Documento16 páginasTotal Station 2016SumethaRajasekar50% (2)
- Total StationDocumento47 páginasTotal StationVinay VitekariAún no hay calificaciones
- Lab Manual 2022Documento23 páginasLab Manual 2022Ashutosh ShuklaAún no hay calificaciones
- Practical 5: Instruments and Accessories Required: Total Station, Leveling Staff EtcDocumento9 páginasPractical 5: Instruments and Accessories Required: Total Station, Leveling Staff EtcVasilisaAún no hay calificaciones
- Total Station PDFDocumento19 páginasTotal Station PDFnirupadi9535Aún no hay calificaciones
- Total Station: Prof. Sahil Sharma Department of Civil Engineering Global Group of Institutes, AmritsarDocumento22 páginasTotal Station: Prof. Sahil Sharma Department of Civil Engineering Global Group of Institutes, AmritsarSaHil ShaRma100% (1)
- SUR Unit-10 Advance Surevying Instrument and Techniques Sem-IV NotesDocumento11 páginasSUR Unit-10 Advance Surevying Instrument and Techniques Sem-IV NotesAryan RathodAún no hay calificaciones
- Electronic InstrumentsDocumento20 páginasElectronic InstrumentsVijendraAún no hay calificaciones
- Modern Surveying Instruments: Vedprakash MarlapalleDocumento22 páginasModern Surveying Instruments: Vedprakash MarlapalleKimberly Jane MitraAún no hay calificaciones
- Total StationDocumento128 páginasTotal StationVivek Ingle100% (2)
- Chap 1 - EDMDocumento20 páginasChap 1 - EDMAmyrul HaqiemAún no hay calificaciones
- Total StaionDocumento10 páginasTotal StaionTaif SAún no hay calificaciones
- Advanced Surveying Instrument S: Ajey Kumar V G M.Tech-Construction Technology Bms College of EngineeringDocumento58 páginasAdvanced Surveying Instrument S: Ajey Kumar V G M.Tech-Construction Technology Bms College of EngineeringMrunmayee ManjariAún no hay calificaciones
- ENGG5024-1985 Electronic Systems Mini ProjectDocumento8 páginasENGG5024-1985 Electronic Systems Mini ProjectAlfred LiAún no hay calificaciones
- Modern Surveying: (Get Familiar With Equipment)Documento18 páginasModern Surveying: (Get Familiar With Equipment)Rp SinghAún no hay calificaciones
- Total Station 40%fDocumento4 páginasTotal Station 40%fGilbertDeVillaManaloAún no hay calificaciones
- Total Station and Its Applications in Surveying - GIS ResourcesDocumento11 páginasTotal Station and Its Applications in Surveying - GIS Resourcesziko52Aún no hay calificaciones
- Chapter One InstruDocumento17 páginasChapter One Instrubahiru meleseAún no hay calificaciones
- History: Surveying Is One of The Most Important, Oldest Practice Carried Out, Which Includes, Taking ofDocumento4 páginasHistory: Surveying Is One of The Most Important, Oldest Practice Carried Out, Which Includes, Taking ofKirsten AudreyAún no hay calificaciones
- Total StationDocumento2 páginasTotal StationHimanshu KatyalAún no hay calificaciones
- Stadia MethodDocumento3 páginasStadia MethodMARK WAVEAún no hay calificaciones
- Modern Survey Unit-4Documento61 páginasModern Survey Unit-4KIRAN KUMAR100% (2)
- 1.6 Modern Surveying EquipmentDocumento22 páginas1.6 Modern Surveying Equipmentarghya adhikaryAún no hay calificaciones
- Slide 1Documento139 páginasSlide 1Thanh Hai NguyenAún no hay calificaciones
- Error and Correction EDMDocumento15 páginasError and Correction EDMDebashisMishraAún no hay calificaciones
- Total Station in Surveying - Operation, Uses and AdvantagesDocumento6 páginasTotal Station in Surveying - Operation, Uses and AdvantagesRipzan xhtAún no hay calificaciones
- Total Station Surveying: May 2011 CE 271Documento16 páginasTotal Station Surveying: May 2011 CE 271masterat0rAún no hay calificaciones
- Stadia TacheometryDocumento13 páginasStadia Tacheometryadolfomc200150% (2)
- Total Station NotesDocumento7 páginasTotal Station NotesParikshith Prasad100% (1)
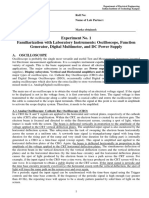
- Experiment No. 1 Familiarization With Laboratory Instruments: Oscilloscope, Function Generator, Digital Multimeter, and DC Power SupplyDocumento12 páginasExperiment No. 1 Familiarization With Laboratory Instruments: Oscilloscope, Function Generator, Digital Multimeter, and DC Power SupplyMukul ChandraAún no hay calificaciones
- Goniophotometer T1: OxytechDocumento6 páginasGoniophotometer T1: OxytechGustavo CeccopieriAún no hay calificaciones
- CHNDDocumento22 páginasCHNDchandhuAún no hay calificaciones
- Unit-4 - Numerical SurveyingDocumento30 páginasUnit-4 - Numerical SurveyingYoukesh GautamAún no hay calificaciones
- Experiment 1 Familiarization With Laboratory Instruments: Oscilloscope, Function Generator, Digital Multimeter, and DC Power SupplyDocumento7 páginasExperiment 1 Familiarization With Laboratory Instruments: Oscilloscope, Function Generator, Digital Multimeter, and DC Power Supplypappuyadav1996Aún no hay calificaciones
- Exp.8 Total Station-IntroductionDocumento4 páginasExp.8 Total Station-IntroductionSaurabhChoudhary67% (3)
- Encoder Lineal-Regla OpticaDocumento6 páginasEncoder Lineal-Regla OpticaNemoz ZrAún no hay calificaciones
- Digital Transducers and Its Application: Mr. Sibu Thomas, Ms. Nishi Shahnaj HaiderDocumento10 páginasDigital Transducers and Its Application: Mr. Sibu Thomas, Ms. Nishi Shahnaj HaiderAnnu MauryaAún no hay calificaciones
- 2nd Semster - Lec04 - Introduction To Total Station PDFDocumento13 páginas2nd Semster - Lec04 - Introduction To Total Station PDFDakheel malekoAún no hay calificaciones
- Lesson 2 MEASUREMENT OF DISTANCE, ERRORS IN MEASUREMENTDocumento26 páginasLesson 2 MEASUREMENT OF DISTANCE, ERRORS IN MEASUREMENTJohn Andrei PorrasAún no hay calificaciones
- InfoMatrix Abstract PocketBot Project - Ondrej Stanek CZDocumento5 páginasInfoMatrix Abstract PocketBot Project - Ondrej Stanek CZLita ClaudiuAún no hay calificaciones
- Total StationDocumento14 páginasTotal StationGayathri Manjunath Shepur50% (2)
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsDe EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsAún no hay calificaciones
- Practical Data Acquisition for Instrumentation and Control SystemsDe EverandPractical Data Acquisition for Instrumentation and Control SystemsAún no hay calificaciones
- Revised TS - and EC Forwelding at DSPDocumento13 páginasRevised TS - and EC Forwelding at DSPRakeshKrAún no hay calificaciones
- COB-3 - Tour Report - 27.11.19Documento2 páginasCOB-3 - Tour Report - 27.11.19RakeshKrAún no hay calificaciones
- Undercharging ReportDocumento29 páginasUndercharging ReportRakeshKrAún no hay calificaciones
- IRCON International LTD Engaged in Construction of The New RailwayDocumento2 páginasIRCON International LTD Engaged in Construction of The New RailwayRakeshKrAún no hay calificaciones
- Declaration Clause 3.1.3Documento1 páginaDeclaration Clause 3.1.3RakeshKrAún no hay calificaciones
- Brahma Bud P1Documento1 páginaBrahma Bud P1RakeshKrAún no hay calificaciones
- Durgapur Steel Plant Job ProtocolDocumento2 páginasDurgapur Steel Plant Job ProtocolRakeshKrAún no hay calificaciones
- Construction Planning and ManagementDocumento33 páginasConstruction Planning and ManagementijlgugAún no hay calificaciones
- Book12222Documento5 páginasBook12222RakeshKrAún no hay calificaciones
- Annual ReqDocumento1 páginaAnnual ReqRakeshKrAún no hay calificaciones
- $R1X90QIDocumento102 páginas$R1X90QIRakeshKrAún no hay calificaciones
- Bihar - Annexure H2Documento148 páginasBihar - Annexure H2RakeshKrAún no hay calificaciones
- Allen: Test Paper of Jee (Main) Examination - 2019Documento4 páginasAllen: Test Paper of Jee (Main) Examination - 2019RakeshKrAún no hay calificaciones
- Transformation of StressDocumento64 páginasTransformation of StressRakeshKrAún no hay calificaciones
- 02 Nov 2014 English PaperDocumento14 páginas02 Nov 2014 English PaperRakeshKrAún no hay calificaciones
- Performance of Ceramic Welding PowderDocumento2 páginasPerformance of Ceramic Welding PowderRakeshKrAún no hay calificaciones
- Steel Authority of India Ltd. Durgapur Steel Plant: Proforma For Initial Item (In Duplicate)Documento1 páginaSteel Authority of India Ltd. Durgapur Steel Plant: Proforma For Initial Item (In Duplicate)RakeshKrAún no hay calificaciones
- Dr. Yeshi Dhonden Tibetan Herbal Clinic, Ashoka Niwas Mcleod Ganj, Dharamsala, Distt. Kangra H.P. Pin - 176219 PH: 0091 1892 221461Documento3 páginasDr. Yeshi Dhonden Tibetan Herbal Clinic, Ashoka Niwas Mcleod Ganj, Dharamsala, Distt. Kangra H.P. Pin - 176219 PH: 0091 1892 221461RakeshKrAún no hay calificaciones
- 1.density PycnometerDocumento4 páginas1.density PycnometerShivpreet SharmaAún no hay calificaciones
- Budgetary Offer by ManishreeDocumento1 páginaBudgetary Offer by ManishreeRakeshKrAún no hay calificaciones
- Annual ReqDocumento1 páginaAnnual ReqRakeshKrAún no hay calificaciones
- Drawing ListDocumento2 páginasDrawing ListRakeshKrAún no hay calificaciones
- Batt#2 AP Base BrickDocumento1 páginaBatt#2 AP Base BrickRakeshKrAún no hay calificaciones
- Total WT ListDocumento1 páginaTotal WT ListRakeshKrAún no hay calificaciones
- PR AttachmentDocumento1 páginaPR AttachmentRakeshKrAún no hay calificaciones
- Unit 8 Reciprocatng Compressors: StructureDocumento26 páginasUnit 8 Reciprocatng Compressors: StructureRakeshKrAún no hay calificaciones
- Fast Moving ItemsDocumento1 páginaFast Moving ItemsRakeshKrAún no hay calificaciones
- 160 Instruments and Measurements Mcqs With AnswersDocumento19 páginas160 Instruments and Measurements Mcqs With AnswersRakeshKrAún no hay calificaciones
- Megger Is An Instrument Used For The Measurement of A) High Resistance and Insulation Resistance B) Medium Resistance C) Low Resistance D) Leakage Current 3Documento9 páginasMegger Is An Instrument Used For The Measurement of A) High Resistance and Insulation Resistance B) Medium Resistance C) Low Resistance D) Leakage Current 3RakeshKrAún no hay calificaciones
- Password For BooksDocumento1 páginaPassword For BooksRakeshKrAún no hay calificaciones
- Substation DiaryDocumento50 páginasSubstation Diaryrajat123sharmaAún no hay calificaciones
- Intelligent Design of Industrial Steel Buildings - A BIM ApproachDocumento8 páginasIntelligent Design of Industrial Steel Buildings - A BIM Approachshubham kothawadeAún no hay calificaciones
- MPhil/PhD Development Planning at The Bartlett Development Planning Unit. University College LondonDocumento2 páginasMPhil/PhD Development Planning at The Bartlett Development Planning Unit. University College LondonThe Bartlett Development Planning Unit - UCLAún no hay calificaciones
- Senior Instrument Engineer Resume - AhammadDocumento5 páginasSenior Instrument Engineer Resume - AhammadSayed Ahammad100% (1)
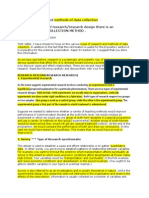
- Communication Studies Unit 1 Data Collection MethodsDocumento9 páginasCommunication Studies Unit 1 Data Collection MethodsPaulCampbell50% (2)
- Course Outlines For CA3144 Sem A 2014-15Documento3 páginasCourse Outlines For CA3144 Sem A 2014-15kkluk913Aún no hay calificaciones
- Turning Five Student Progress ReportDocumento2 páginasTurning Five Student Progress ReportBryan Peterson100% (2)
- Learning StoryDocumento13 páginasLearning Storyapi-582461316Aún no hay calificaciones
- Seven Steps To Successful Strategic PlanningDocumento4 páginasSeven Steps To Successful Strategic PlanningtaimostymosAún no hay calificaciones
- Api580 Rbi OverviewDocumento5 páginasApi580 Rbi Overviewbitam_27Aún no hay calificaciones
- Dispersion ModelingDocumento33 páginasDispersion ModelingAnuradha ChauhanAún no hay calificaciones
- Anomalous Worldwide SEISMIC July 2010Documento130 páginasAnomalous Worldwide SEISMIC July 2010Vincent J. CataldiAún no hay calificaciones
- (Rom Harr) The Singular Self An Introduction ToDocumento195 páginas(Rom Harr) The Singular Self An Introduction Topsifil100% (1)
- Simple Stress & StrainDocumento34 páginasSimple Stress & StrainfaisalasgharAún no hay calificaciones
- Direct 3 DDocumento406 páginasDirect 3 Dxlam99Aún no hay calificaciones
- Fatigue Assessment Analysis of Offshore Structures With Application To An Existing Platform in Suez Gulf, EgyptDocumento21 páginasFatigue Assessment Analysis of Offshore Structures With Application To An Existing Platform in Suez Gulf, EgyptthuanAún no hay calificaciones
- SpeedwayReaderQuickStartGuide 50484060407Documento2 páginasSpeedwayReaderQuickStartGuide 50484060407LuisAún no hay calificaciones
- Hot Dip Galvanized SheetDocumento2 páginasHot Dip Galvanized SheetgorakdiasAún no hay calificaciones
- CVE 202 Lecture - 28062021Documento11 páginasCVE 202 Lecture - 28062021odubade opeyemiAún no hay calificaciones
- Preparation of Instructional MaterialsDocumento28 páginasPreparation of Instructional MaterialsMara Quila-Verzo86% (7)
- Developing Training Program For Effective and Quality Volleyball PlayersDocumento13 páginasDeveloping Training Program For Effective and Quality Volleyball PlayersDeogracia BorresAún no hay calificaciones
- Penguatan Industri Kreatif Batik Semarang Di Kampung Alam Malon Kecamatan Gunung Pati SemarangDocumento10 páginasPenguatan Industri Kreatif Batik Semarang Di Kampung Alam Malon Kecamatan Gunung Pati SemarangAllo YeAún no hay calificaciones
- Lesson 2: IGSS System Overview: Interactive Graphical SCADA SystemDocumento7 páginasLesson 2: IGSS System Overview: Interactive Graphical SCADA SystemRoberto CarrascoAún no hay calificaciones
- Sample of PHD Thesis Content Format USIM - Computer ScienceDocumento6 páginasSample of PHD Thesis Content Format USIM - Computer ScienceKhirulnizam Abd RahmanAún no hay calificaciones
- Display Transcript: Institution Credit Transcript TotalsDocumento8 páginasDisplay Transcript: Institution Credit Transcript Totalsking_studios7353Aún no hay calificaciones
- Observation ChecklistDocumento4 páginasObservation ChecklistNiketa Joseph100% (5)
- Bodies That MatterDocumento6 páginasBodies That MatterLorena FernandezAún no hay calificaciones
- The Menstrual Cycle Remedies Amenorrhea HandoutDocumento3 páginasThe Menstrual Cycle Remedies Amenorrhea HandoutRoger AugeAún no hay calificaciones
- Curriculum Vitae: EducationDocumento3 páginasCurriculum Vitae: EducationdavidAún no hay calificaciones
- Ground Water Brochure of Jhansi District, Uttar Pradesh: Title Page NoDocumento19 páginasGround Water Brochure of Jhansi District, Uttar Pradesh: Title Page NoSandeep KumarAún no hay calificaciones