También podría gustarte
- Physics Coursework ParachuteDocumento5 páginasPhysics Coursework Parachutef675ztsf100% (2)
- Plugin GetPDFServlet 2Documento4 páginasPlugin GetPDFServlet 2Pikir HatiAún no hay calificaciones
- Measure air viscosity with soap film in funnelDocumento8 páginasMeasure air viscosity with soap film in funnel026 sandyAún no hay calificaciones
- ILAR HydrodynamicsDocumento16 páginasILAR HydrodynamicsFritz FestejoAún no hay calificaciones
- Classification and Principle of Wind TunnelDocumento4 páginasClassification and Principle of Wind TunnelJones arun rajAún no hay calificaciones
- Two Take Home Experiments in Fluid MechanicsDocumento8 páginasTwo Take Home Experiments in Fluid MechanicsVíctor QuezadaAún no hay calificaciones
- Ipho 2012: How Magnets Curve The Water: Home Search Collections Journals About Contact Us My IopscienceDocumento15 páginasIpho 2012: How Magnets Curve The Water: Home Search Collections Journals About Contact Us My Iopsciencetraja202Aún no hay calificaciones
- Introduction to the Physics of Fluids and SolidsDe EverandIntroduction to the Physics of Fluids and SolidsCalificación: 3 de 5 estrellas3/5 (1)
- Exploration of Projectile Motion and Air Resistance Using A Java AppletDocumento2 páginasExploration of Projectile Motion and Air Resistance Using A Java AppletNur Hidayah MohamadAún no hay calificaciones
- Research Paper On RheologyDocumento7 páginasResearch Paper On Rheologyafnkaufhczyvbc100% (1)
- An Introduction To Inhomogeneous Liquids, Density Functional TheoryDocumento12 páginasAn Introduction To Inhomogeneous Liquids, Density Functional TheoryJohn Hernan Diaz ForeroAún no hay calificaciones
- MATLAB Time-Based Simulations of Projectile Motion, Pendulum Oscillation, and Water DischargeDocumento18 páginasMATLAB Time-Based Simulations of Projectile Motion, Pendulum Oscillation, and Water DischargeKurnia Asih ManurungAún no hay calificaciones
- Yıldız 2016 J. Phys. Conf. Ser. 707 012040Documento8 páginasYıldız 2016 J. Phys. Conf. Ser. 707 012040Liu YuXinAún no hay calificaciones
- Realtime Physics: Active Learning Labs Transforming The Introductory LaboratoryDocumento14 páginasRealtime Physics: Active Learning Labs Transforming The Introductory LaboratorysaleemAún no hay calificaciones
- Literature Review of Water RocketDocumento7 páginasLiterature Review of Water Rocketaflslwuup100% (1)
- UiTM Hydrostatic Force Experiment - Suggestions and ImprovementsDocumento2 páginasUiTM Hydrostatic Force Experiment - Suggestions and ImprovementsPhiXieAún no hay calificaciones
- Vortex Tube Thesis PDFDocumento12 páginasVortex Tube Thesis PDFcarlamolinafortwayne100% (2)
- Hands On Education System Using Water RocketDocumento5 páginasHands On Education System Using Water Rocketazam.cheAún no hay calificaciones
- RV Hs Science Common Core - Ela 6 1Documento17 páginasRV Hs Science Common Core - Ela 6 1api-252183182Aún no hay calificaciones
- Glück Et Al. - 2003 - Computation of Wind-Induced Vibrations of Flexible Shells and Membranous Structures PDFDocumento27 páginasGlück Et Al. - 2003 - Computation of Wind-Induced Vibrations of Flexible Shells and Membranous Structures PDFCenascenascenascenasAún no hay calificaciones
- Master Thesis MeteorologyDocumento8 páginasMaster Thesis Meteorologyxgkeiiygg100% (1)
- Experiments With Weathering, Erosion and Deposition For The Earth Science Regents CourseDocumento10 páginasExperiments With Weathering, Erosion and Deposition For The Earth Science Regents CourseLembert CasinilloAún no hay calificaciones
- Weather Analysis and Forecasting: Applying Satellite Water Vapor Imagery and Potential Vorticity AnalysisDe EverandWeather Analysis and Forecasting: Applying Satellite Water Vapor Imagery and Potential Vorticity AnalysisAún no hay calificaciones
- The Lagrangian Particle Dispersion Model FLEXPART-WRF Version 3.1Documento17 páginasThe Lagrangian Particle Dispersion Model FLEXPART-WRF Version 3.1Engr Saif UllahAún no hay calificaciones
- PHD Thesis Fluid DynamicsDocumento6 páginasPHD Thesis Fluid Dynamicsbk184deh100% (2)
- Science AT1 Bottle Rocket ProjectDocumento11 páginasScience AT1 Bottle Rocket ProjectMichael RenAún no hay calificaciones
- Cbems 140aDocumento19 páginasCbems 140amdawg467Aún no hay calificaciones
- Wind-Wave Induced Dynamic Response - EffectiveRAODocumento10 páginasWind-Wave Induced Dynamic Response - EffectiveRAOputhenkulamAún no hay calificaciones
- IYPT Sweden's Problem Ranking of The IYPT 2024 ProblemsDocumento7 páginasIYPT Sweden's Problem Ranking of The IYPT 2024 Problemsqbvz6swcmmAún no hay calificaciones
- A Laboratory Study of Heterogeneous Catalysis in Ultrahigh VacuumDocumento16 páginasA Laboratory Study of Heterogeneous Catalysis in Ultrahigh VacuumJonathanAún no hay calificaciones
- A Bernoulli's Law Lab in A Bottle: 193.146.96.26 On: Sun, 19 Oct 2014 11:29:56Documento5 páginasA Bernoulli's Law Lab in A Bottle: 193.146.96.26 On: Sun, 19 Oct 2014 11:29:56FernandoAún no hay calificaciones
- Modelling Ocean Climate Variability by Artem S. Sarkisyan and J Urgen E. S UndermannDocumento385 páginasModelling Ocean Climate Variability by Artem S. Sarkisyan and J Urgen E. S UndermannTatiana N. LeónAún no hay calificaciones
- Essentials of Meteorology An Invitation To The Atmosphere 7th Edition Ahrens Solutions Manual 1Documento7 páginasEssentials of Meteorology An Invitation To The Atmosphere 7th Edition Ahrens Solutions Manual 1harold100% (38)
- Green Sea ModellingDocumento9 páginasGreen Sea ModellingJohn simpsonAún no hay calificaciones
- Understanding The Physics of Bungee JumpingDocumento11 páginasUnderstanding The Physics of Bungee JumpingmissdropaAún no hay calificaciones
- Research Papers in Physics EducationDocumento6 páginasResearch Papers in Physics Educationafeazleae100% (1)
- Integrating Pneumatics Into The Science CurriculumDocumento9 páginasIntegrating Pneumatics Into The Science Curriculumtuantu007Aún no hay calificaciones
- Efficient Prediction of Dynamic Responses-DelftDocumento178 páginasEfficient Prediction of Dynamic Responses-DelfttompmathaiAún no hay calificaciones
- EE Rubric PhysicsDocumento9 páginasEE Rubric PhysicsMike AndersonAún no hay calificaciones
- Cluster 2: Flight: Grade 6Documento40 páginasCluster 2: Flight: Grade 6Harish MathiazhahanAún no hay calificaciones
- A Discussion On Velocity-Speed and Their InstructiDocumento8 páginasA Discussion On Velocity-Speed and Their InstructiLiu YuXinAún no hay calificaciones
- MATH 2103: Differential Equations Lecture 4: Applications of Differential EquationsDocumento19 páginasMATH 2103: Differential Equations Lecture 4: Applications of Differential EquationsRheyann PazAún no hay calificaciones
- Graduateinstitute - CH ThesisDocumento8 páginasGraduateinstitute - CH Thesismoniquedaviswashington100% (2)
- Physics Research Paper SampleDocumento6 páginasPhysics Research Paper Sampleixevojrif100% (1)
- Solution Manual For Essentials of Meteorology An Invitation To The Atmosphere 7th Edition DownloadDocumento8 páginasSolution Manual For Essentials of Meteorology An Invitation To The Atmosphere 7th Edition DownloadMrKyleLynchwtjo100% (41)
- Lab Report Sa Water RocketDocumento12 páginasLab Report Sa Water RocketlariosabritAún no hay calificaciones
- An Introduction To Atmospheric Modeling PDFDocumento336 páginasAn Introduction To Atmospheric Modeling PDFyanethsanchezAún no hay calificaciones
- Vortex Tube Research PaperDocumento8 páginasVortex Tube Research Papergpxmlevkg100% (1)
- Cross-Scale Coupling and Energy Transfer in the Magnetosphere-Ionosphere-Thermosphere SystemDe EverandCross-Scale Coupling and Energy Transfer in the Magnetosphere-Ionosphere-Thermosphere SystemYukitoshi NishimuraAún no hay calificaciones
- Ac 2007-2695: Modeling Compressible Air Flow in A Charging or Discharging Vessel and Assessment of Polytropic ExponentDocumento18 páginasAc 2007-2695: Modeling Compressible Air Flow in A Charging or Discharging Vessel and Assessment of Polytropic Exponentpma61Aún no hay calificaciones
- An Introduction To Electrical Resistivity in Geophysics: Rhett HermanDocumento10 páginasAn Introduction To Electrical Resistivity in Geophysics: Rhett HermanAndri AbduRrachman HakimAún no hay calificaciones
- Thesis Experimental TechniquesDocumento5 páginasThesis Experimental Techniquescathybaumgardnerfargo100% (2)
- Sea breeze and land breeze experimentDocumento3 páginasSea breeze and land breeze experimentRichardCastrenceParagas80% (10)
- Writing Thesis ReportDocumento4 páginasWriting Thesis Reportcoawokugg100% (2)
- Ac 2011-687: Solar Distillation ProjectDocumento9 páginasAc 2011-687: Solar Distillation ProjectTadesse TeshomeAún no hay calificaciones
- UCD 115 Instrumental Analysis: UC DavisDocumento73 páginasUCD 115 Instrumental Analysis: UC Daviskhanh khanhAún no hay calificaciones
- 9693 Marine Science As Teacher SupportDocumento32 páginas9693 Marine Science As Teacher SupportBunyameen BunAún no hay calificaciones
- On The Systems Approach in HydrologyDocumento23 páginasOn The Systems Approach in HydrologyMaxwell NgumuyaAún no hay calificaciones
- Use of Packer Test Results in Hydrogeological Characterization: A Comparison of Calculation Methods For A Representative ValueDocumento19 páginasUse of Packer Test Results in Hydrogeological Characterization: A Comparison of Calculation Methods For A Representative ValueMimicry TarnAún no hay calificaciones
- Eulerian Lagrangian RepresentationsDocumento91 páginasEulerian Lagrangian RepresentationsI_I_Aún no hay calificaciones
- IEEE Transactions On Magnetics Volume 50 Issue 2 2014 (Doi 10.1109/TDocumento4 páginasIEEE Transactions On Magnetics Volume 50 Issue 2 2014 (Doi 10.1109/TGuillermo Henry Ramirez UlloaAún no hay calificaciones
- Theory and Application of Magnetic Flux Leakage Pipeline DetectionDocumento20 páginasTheory and Application of Magnetic Flux Leakage Pipeline DetectionGuillermo Henry Ramirez UlloaAún no hay calificaciones
- New AppendicesDocumento129 páginasNew AppendicesSukhmander SinghAún no hay calificaciones
- 1 s2.0 S1001605814600883 MainDocumento11 páginas1 s2.0 S1001605814600883 MainGuillermo Henry Ramirez UlloaAún no hay calificaciones
- Hydrodynamics of Vegetated Channels PDFDocumento23 páginasHydrodynamics of Vegetated Channels PDFGuillermo Henry Ramirez UlloaAún no hay calificaciones
- New AppendicesDocumento129 páginasNew AppendicesSukhmander SinghAún no hay calificaciones
- Journal of Hydraulic ResearchDocumento19 páginasJournal of Hydraulic ResearchGuillermo Henry Ramirez UlloaAún no hay calificaciones
- Stress Relaxation Properties of Prestressed Steel Wires ExaminedDocumento7 páginasStress Relaxation Properties of Prestressed Steel Wires ExaminedGuillermo Henry Ramirez UlloaAún no hay calificaciones
- Dr. Pardue Problems PDFDocumento22 páginasDr. Pardue Problems PDFGuillermo Henry Ramirez UlloaAún no hay calificaciones
- Sources AnDocumento6 páginasSources AnGuillermo Henry Ramirez UlloaAún no hay calificaciones
- Lecture Notes in Structural Engineering Analysis DesignDocumento142 páginasLecture Notes in Structural Engineering Analysis DesignPankaj_Taneja_9684100% (1)
- 10 1 1 21 4985 PDFDocumento23 páginas10 1 1 21 4985 PDFGuillermo Henry Ramirez UlloaAún no hay calificaciones
- Smart Grid in IndiaDocumento17 páginasSmart Grid in Indiatejomayi100% (1)
- ALPAM DrakaDocumento1 páginaALPAM Drakaamir11601Aún no hay calificaciones
- Low Voltage Capacitors For Improved Power Quality: Produc T BrochureDocumento20 páginasLow Voltage Capacitors For Improved Power Quality: Produc T BrochureJuan Alberto Cayetano GomezAún no hay calificaciones
- 1006 Tag Engine Parts BookDocumento216 páginas1006 Tag Engine Parts BookNilupul WijeratneAún no hay calificaciones
- Somayya Polytechnic, Wadgaon, Chandrapur Department of Mining and Mine Surveying 2 Year - Subject Notes Subject: Mine Ventilation Unit: 01 - Mine AirDocumento136 páginasSomayya Polytechnic, Wadgaon, Chandrapur Department of Mining and Mine Surveying 2 Year - Subject Notes Subject: Mine Ventilation Unit: 01 - Mine AirMayur BawaneAún no hay calificaciones
- Jean Dubuis - Initiatory Alchemical TreatiseDocumento7 páginasJean Dubuis - Initiatory Alchemical Treatiseeljedioscuro100% (1)
- Cable ColorDocumento4 páginasCable ColorNghia Huynh Ngoc0% (1)
- Control SystemsDocumento77 páginasControl SystemsLuis Portillo Ogbe BaraAún no hay calificaciones
- Iso 22628Documento14 páginasIso 22628David SouthgateAún no hay calificaciones
- Harris ER90S B3Documento2 páginasHarris ER90S B3Mingo EvaAún no hay calificaciones
- Fluke 1651 User ManualDocumento80 páginasFluke 1651 User ManualGraham DickensAún no hay calificaciones
- Ecu MappingDocumento8 páginasEcu MappingVitor SegniniAún no hay calificaciones
- Aged Care Homes at ScottsdaleDocumento136 páginasAged Care Homes at ScottsdaleThe ExaminerAún no hay calificaciones
- Design calculation for condensate polishing systemDocumento39 páginasDesign calculation for condensate polishing systemAnonymous JtYvKt5XEAún no hay calificaciones
- Work, Energy and PowerDocumento4 páginasWork, Energy and PowerSwaapnil Shinde100% (1)
- Science Fair Report 2906Documento24 páginasScience Fair Report 2906LONDONAún no hay calificaciones
- Summary Sheets Complete Version F2013Documento58 páginasSummary Sheets Complete Version F2013Minjae LeeAún no hay calificaciones
- Castillo ProfileDocumento46 páginasCastillo ProfileprabhumanocAún no hay calificaciones
- Toyota YarisDocumento5 páginasToyota YarisMohammed Yusuf100% (1)
- Ficha Técnica - Titan 1000 AE (Inglés)Documento2 páginasFicha Técnica - Titan 1000 AE (Inglés)Pedro Ramos PAchecoAún no hay calificaciones
- FM400 8X4 Tipper With Rock Body Specs & DetailsDocumento4 páginasFM400 8X4 Tipper With Rock Body Specs & DetailsHaneefa ChAún no hay calificaciones
- Effects On The Human Body: Extremely Low Frequency RFDocumento1 páginaEffects On The Human Body: Extremely Low Frequency RFGokul KrishAún no hay calificaciones
- PedgkDocumento32 páginasPedgkGokulakrishnanAún no hay calificaciones
- Ball Piston Engine JournalDocumento14 páginasBall Piston Engine JournalJITHIN.PAún no hay calificaciones
- Petrochemical Industry in India - Determinants, ChallengesDocumento5 páginasPetrochemical Industry in India - Determinants, Challengesvvk2cool100% (1)
- Energetics QuestionsDocumento2 páginasEnergetics QuestionsBrandeice BarrettAún no hay calificaciones
- Astor: Test TransformerDocumento1 páginaAstor: Test TransformermominzadahAún no hay calificaciones
- School Lesson LogDocumento4 páginasSchool Lesson LogLudy Lyn80% (5)
- Inert GasDocumento17 páginasInert GasniyazmarinerAún no hay calificaciones
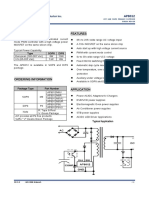
- Description Features: Ait Semiconductor IncDocumento10 páginasDescription Features: Ait Semiconductor IncMaktum KamatAún no hay calificaciones