También podría gustarte
- Cap 3-Electronica de Potencia - Daniel W HartDocumento49 páginasCap 3-Electronica de Potencia - Daniel W HartLeonel BriceñoAún no hay calificaciones
- Calderas 3ADocumento26 páginasCalderas 3ALeonel Briceño100% (1)
- Calderas CesarvergaraDocumento21 páginasCalderas Cesarvergaracanencia_12perroAún no hay calificaciones
- Ejercicios de PracticasDocumento20 páginasEjercicios de PracticasmsterwillAún no hay calificaciones
- Capitulo 9 Maquina SincronicaDocumento30 páginasCapitulo 9 Maquina SincronicaAdrian Tapia CollAún no hay calificaciones
- Laboratorio 1 FinalDocumento13 páginasLaboratorio 1 FinalEder SalvadorAún no hay calificaciones
- Diseno Sistemas Digitales VHDLDocumento270 páginasDiseno Sistemas Digitales VHDLHarold David Gil MuñozAún no hay calificaciones
- Ejemplosdewincupl 111102123811 Phpapp01Documento8 páginasEjemplosdewincupl 111102123811 Phpapp01Leonel BriceñoAún no hay calificaciones
- Teorema de TheveninDocumento4 páginasTeorema de TheveninLeonel BriceñoAún no hay calificaciones
- Silicio 120810233729 Phpapp01Documento1 páginaSilicio 120810233729 Phpapp01Leonel BriceñoAún no hay calificaciones
- Ensayo Revolución RusaDocumento2 páginasEnsayo Revolución RusaMónica Aravena83% (30)
- Ejercicios Integral Indefinida PDFDocumento24 páginasEjercicios Integral Indefinida PDFAnonymous 0sqpeg6CAún no hay calificaciones
- Fisica Sem 3Documento4 páginasFisica Sem 3Juanjo Peña SantosAún no hay calificaciones
- Practica 3 (E) (Arranque Estrella A Delta)Documento4 páginasPractica 3 (E) (Arranque Estrella A Delta)Sangu Sumerio Solis CAún no hay calificaciones
- Informe Final de Circuitos Electricos 2 N 1 FIEE UNMSM PDFDocumento6 páginasInforme Final de Circuitos Electricos 2 N 1 FIEE UNMSM PDFbruno100% (2)
- Bobina de Tesla Monografria Felix BogadoDocumento29 páginasBobina de Tesla Monografria Felix Bogadoedi24292562100% (1)
- Agrotecnologia - Año 2 - Numero 16 - 2012 - Paraguay - PortalguaraniDocumento68 páginasAgrotecnologia - Año 2 - Numero 16 - 2012 - Paraguay - PortalguaraniPortalGuarani4Aún no hay calificaciones
- Aaapractica PoligomasDocumento13 páginasAaapractica Poligomasdiana02mxAún no hay calificaciones
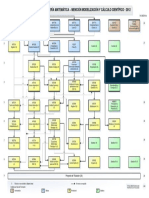
- Malla Curricular Ing Matematica Mencion Modelizacion PDFDocumento1 páginaMalla Curricular Ing Matematica Mencion Modelizacion PDFbartolome777ooAún no hay calificaciones
- Concreto Armado 1Documento38 páginasConcreto Armado 1Pamela YupanqAún no hay calificaciones
- Informe de Laboratorio - Ensayo de Corte DirectoDocumento14 páginasInforme de Laboratorio - Ensayo de Corte DirectoMarxContrerasAún no hay calificaciones
- Fases Del Desarrollo Organizacional y Modelos de Cambios Planeado en La OrganizaciónDocumento12 páginasFases Del Desarrollo Organizacional y Modelos de Cambios Planeado en La OrganizaciónEdwin Garcia100% (1)
- Cuestionario de Energia y PotenciaDocumento44 páginasCuestionario de Energia y Potenciaive manamasAún no hay calificaciones
- 3 Mundos Ocultos OkokokDocumento14 páginas3 Mundos Ocultos OkokokRafael MercadoAún no hay calificaciones
- Validación de Un MétodoDocumento7 páginasValidación de Un MétodoMarianela BignertAún no hay calificaciones
- PRÁCTICA N5 Guaifenesina Por Cromatografia de GasesDocumento4 páginasPRÁCTICA N5 Guaifenesina Por Cromatografia de GasesVal RomeroAún no hay calificaciones
- Memoria Tecnica Torres OccidenteDocumento58 páginasMemoria Tecnica Torres OccidenteDiana MLAún no hay calificaciones
- 11 HDT Multitrans API GL 4Documento2 páginas11 HDT Multitrans API GL 4Javier GonzálezAún no hay calificaciones
- Matemática I: Conjuntos, funciones, límites y derivadasDocumento7 páginasMatemática I: Conjuntos, funciones, límites y derivadasJoan Robert ArpitaAún no hay calificaciones
- Cuchilla Desconectadora Operacion en Grupo - COMANELDocumento6 páginasCuchilla Desconectadora Operacion en Grupo - COMANELFernando TamayoAún no hay calificaciones
- Modelado de Sistemas ClasesDocumento85 páginasModelado de Sistemas ClasesSergio Reyes CabreraAún no hay calificaciones
- Diseños TransaccionalesDocumento13 páginasDiseños TransaccionalesPatrick Io100% (1)
- Aleaciones de Aluminio - Catalogo - PDF - Libro - Alu-Stock - LA4 - Cap11 - AleacionesDocumento102 páginasAleaciones de Aluminio - Catalogo - PDF - Libro - Alu-Stock - LA4 - Cap11 - Aleacionesmarher10% (1)
- Articulo GeotecniaDocumento2 páginasArticulo GeotecniaAndresMolinaAún no hay calificaciones
- Ensayo de Tiempo de FraguaDocumento9 páginasEnsayo de Tiempo de FraguaManuel MiguelAún no hay calificaciones
- MetalDocumento53 páginasMetalda nAún no hay calificaciones
- Qué Es La InterferenciaDocumento5 páginasQué Es La InterferenciaSandra Paulet Ampuero100% (1)
- Determinación de acidez y alcalinidadDocumento4 páginasDeterminación de acidez y alcalinidadYesika AlmanzaAún no hay calificaciones
- Química - Enlace Químico, Iónico y CovalenteDocumento1 páginaQuímica - Enlace Químico, Iónico y CovalenteLuisana Isabel DoranteAún no hay calificaciones
- Calor específico experimental de muestras a altas y bajas temperaturasDocumento6 páginasCalor específico experimental de muestras a altas y bajas temperaturasJohann RooaAún no hay calificaciones
- Atlas Del UniversoDocumento58 páginasAtlas Del UniversodvdtorresAún no hay calificaciones