También podría gustarte
- Tractor Principles: The Action, Mechanism, Handling, Care, Maintenance and Repair of the Gas Engine TractorDe EverandTractor Principles: The Action, Mechanism, Handling, Care, Maintenance and Repair of the Gas Engine TractorAún no hay calificaciones
- D65EX D65PX D65WX: Tier 4 Final EngineDocumento16 páginasD65EX D65PX D65WX: Tier 4 Final EnginePMV DeptAún no hay calificaciones
- Gear Failure AnalysisDocumento110 páginasGear Failure AnalysisMuhammad afzal100% (5)
- Speed Changers, Drives & Gears World Summary: Market Values & Financials by CountryDe EverandSpeed Changers, Drives & Gears World Summary: Market Values & Financials by CountryAún no hay calificaciones
- 7963-3 x12cm32 Specs Scope of Supply 1Documento11 páginas7963-3 x12cm32 Specs Scope of Supply 1Gabriel Andres ValenciaAún no hay calificaciones
- Cat CM32Documento2 páginasCat CM32heyanjAún no hay calificaciones
- Gas-Engines and Producer-Gas Plants A Practice Treatise Setting Forth the Principles of Gas-Engines and Producer Design, the Selection and Installation of an Engine, Conditions of Perfect Operation, Producer-Gas Engines and Their Possibilities, the Care of Gas-Engines and Producer-Gas Plants, with a Chapter on Volatile Hydrocarbon and Oil EnginesDe EverandGas-Engines and Producer-Gas Plants A Practice Treatise Setting Forth the Principles of Gas-Engines and Producer Design, the Selection and Installation of an Engine, Conditions of Perfect Operation, Producer-Gas Engines and Their Possibilities, the Care of Gas-Engines and Producer-Gas Plants, with a Chapter on Volatile Hydrocarbon and Oil EnginesAún no hay calificaciones
- Duke EngineDocumento19 páginasDuke EngineMath And EngineeringAún no hay calificaciones
- How to Rebuild & Modify Rochester Quadrajet CarburetorsDe EverandHow to Rebuild & Modify Rochester Quadrajet CarburetorsCalificación: 5 de 5 estrellas5/5 (2)
- Deutz TCD 2015Documento2 páginasDeutz TCD 2015Paul GuillaumeAún no hay calificaciones
- Building Honda K-Series Engine PerformanceDe EverandBuilding Honda K-Series Engine PerformanceCalificación: 5 de 5 estrellas5/5 (2)
- Deutz 2015Documento2 páginasDeutz 2015mohammad hazbehzadAún no hay calificaciones
- Estandar Instuctor de Motoniveladoras Carlos Hernan Rodriguez BedoyaDocumento105 páginasEstandar Instuctor de Motoniveladoras Carlos Hernan Rodriguez BedoyaJorgeAMoralesAún no hay calificaciones
- Mercedes Benz & Dodge Sprinter CDI 2000-2006 Owners Workshop ManualDe EverandMercedes Benz & Dodge Sprinter CDI 2000-2006 Owners Workshop ManualCalificación: 2.5 de 5 estrellas2.5/5 (2)
- DozerDocumento45 páginasDozerAndry Perdana PutraAún no hay calificaciones
- Mercedes Benz & Dodge Sprinter CDI 2000-2006 Owners Workshop ManualDe EverandMercedes Benz & Dodge Sprinter CDI 2000-2006 Owners Workshop ManualAún no hay calificaciones
- Engine For Industrial Applications: 240-520 KW - 322-697 HP at 2100 Min - RPM EU Stage III B / US EPA Tier 4 InterimDocumento6 páginasEngine For Industrial Applications: 240-520 KW - 322-697 HP at 2100 Min - RPM EU Stage III B / US EPA Tier 4 InterimCleiton AviAún no hay calificaciones
- How Boat Things Work: An Illustrated GuideDe EverandHow Boat Things Work: An Illustrated GuideCalificación: 4 de 5 estrellas4/5 (7)
- Track-Type Tractor: Engine WeightDocumento20 páginasTrack-Type Tractor: Engine WeightFIGUEIRAS & LOUREIRO,Lda Sociedade de construçõesAún no hay calificaciones
- Dynamometer: Theory and Application to Engine TestingDe EverandDynamometer: Theory and Application to Engine TestingAún no hay calificaciones
- Treinamento - de lg936 - Eng - Rev1 - 2010Documento146 páginasTreinamento - de lg936 - Eng - Rev1 - 2010Johan Mauricio Romero ChitivaAún no hay calificaciones
- Small Engines and Outdoor Power Equipment: A Care & Repair Guide for: Lawn Mowers, Snowblowers & Small Gas-Powered ImplementsDe EverandSmall Engines and Outdoor Power Equipment: A Care & Repair Guide for: Lawn Mowers, Snowblowers & Small Gas-Powered ImplementsAún no hay calificaciones
- The Engine For Construction Equipment. 240 - 500 KW - 322 - 670 HP at 1900/2100 RPMDocumento4 páginasThe Engine For Construction Equipment. 240 - 500 KW - 322 - 670 HP at 1900/2100 RPMSamir YehyaAún no hay calificaciones
- Mercedes - Benz Vito & V-Class Petrol & Diesel Models: Workshop Manual - 2000 - 2003De EverandMercedes - Benz Vito & V-Class Petrol & Diesel Models: Workshop Manual - 2000 - 2003Calificación: 5 de 5 estrellas5/5 (1)
- DK10 Series SpecsDocumento2 páginasDK10 Series SpecsTakaAún no hay calificaciones
- 6EY22 Marine Auxiliairy Diesel EngineDocumento28 páginas6EY22 Marine Auxiliairy Diesel EngineRifkiHabibi100% (1)
- D65ex 16Documento8 páginasD65ex 16David Adco Apaza100% (2)
- En GD655 6BR01 0722 V8 PDFDocumento16 páginasEn GD655 6BR01 0722 V8 PDFadrienAún no hay calificaciones
- Technical Specifications: DozerDocumento10 páginasTechnical Specifications: DozerRafael CasteloAún no hay calificaciones
- Fuel Safe - SmallsizeDocumento11 páginasFuel Safe - SmallsizeAnthonio LisonAún no hay calificaciones
- Cat - D8T Dozer Specs, Videos & 360 Views - D8 Dozer - CaterpillarDocumento17 páginasCat - D8T Dozer Specs, Videos & 360 Views - D8 Dozer - CaterpillarDavisson9Aún no hay calificaciones
- MY22 Sprinter Brochure ENGLISH 2022Documento26 páginasMY22 Sprinter Brochure ENGLISH 2022wolopiotrAún no hay calificaciones
- Dozer D375A 8 Brochure English EN-D375A-8BR01-0722-V12Documento20 páginasDozer D375A 8 Brochure English EN-D375A-8BR01-0722-V12marionabil998Aún no hay calificaciones
- Rolls Royce DieselelektriskDocumento18 páginasRolls Royce DieselelektriskVegard SømliøyAún no hay calificaciones
- Catalog Power Packs Linear DrivesDocumento20 páginasCatalog Power Packs Linear DrivesJuan ChoAún no hay calificaciones
- Ic-Pneumatic Lpg/Diesel Pneumatic or Solid TyresDocumento8 páginasIc-Pneumatic Lpg/Diesel Pneumatic or Solid TyresYakupovmmAún no hay calificaciones
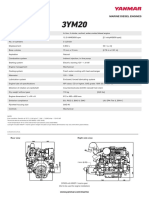
- 3YM20Documento2 páginas3YM20ZNC Plamo and ToyzAún no hay calificaciones
- Grupos Electrogenos Gas Cat g16cm34Documento2 páginasGrupos Electrogenos Gas Cat g16cm34Jesus David Rhenals JulioAún no hay calificaciones
- 12M55 Series: Powerkit EngineDocumento3 páginas12M55 Series: Powerkit EngineAlberto F. Apablaza MezaAún no hay calificaciones
- 286 Ho 722.9 062504Documento79 páginas286 Ho 722.9 062504arkhom196% (28)
- Doosan PSI 21.9L Spec SheetDocumento1 páginaDoosan PSI 21.9L Spec Sheetebow powerAún no hay calificaciones
- Gcm34 Electric Power Generator Set: Features and BenefitsDocumento4 páginasGcm34 Electric Power Generator Set: Features and BenefitsMohammad RahatAún no hay calificaciones
- Cat 777E: Off-Highway TruckDocumento2 páginasCat 777E: Off-Highway Truckandie.notoAún no hay calificaciones
- Product Range: A Quick ReferenceDocumento44 páginasProduct Range: A Quick Referencewirat9wisawaAún no hay calificaciones
- Western Star 6900XD 40-Ton Off Road HaulerDocumento4 páginasWestern Star 6900XD 40-Ton Off Road HaulerAndrew VisagieAún no hay calificaciones
- Lubrication and Maintenance: General InformationDocumento1896 páginasLubrication and Maintenance: General InformationTonyAún no hay calificaciones
- Total Service: CharacteristicsDocumento4 páginasTotal Service: Characteristicsflorensius suparyantoAún no hay calificaciones
- SpecificationsDocumento4 páginasSpecificationsForomaquinas100% (3)
- Tier 4 Final Engine: Motor GraderDocumento16 páginasTier 4 Final Engine: Motor Gradergoonzaalo_22Aún no hay calificaciones
- New Pulsar 220 DTSi Bulletin Provides Product DetailsDocumento32 páginasNew Pulsar 220 DTSi Bulletin Provides Product DetailsHugo Alberto Malespin Solis67% (3)
- Hybrid DCTs and modular platforms support future electrificationDocumento26 páginasHybrid DCTs and modular platforms support future electrificationRafael Nakazato RecioAún no hay calificaciones
- 12 A 16CM32Documento2 páginas12 A 16CM32Angel NajarroAún no hay calificaciones
- 9Cm20C Offshore Production Generator Set: Features and BenefitsDocumento4 páginas9Cm20C Offshore Production Generator Set: Features and Benefitsn.hartonoAún no hay calificaciones
- Subaru PDF TrimComparisonDocumento24 páginasSubaru PDF TrimComparisonGonzalo GonzalezAún no hay calificaciones
- Ea888 Gen3 - Design and Function-Ssp - 820533 - 2 - 0 - Tsi - 4 - 30 - 2014Documento56 páginasEa888 Gen3 - Design and Function-Ssp - 820533 - 2 - 0 - Tsi - 4 - 30 - 2014marcddd100% (4)
- Cat - 775G Off-Highway Truck - CaterpillarDocumento5 páginasCat - 775G Off-Highway Truck - CaterpillarLapak SeberangAún no hay calificaciones
- BMW Transmission FundamentalsDocumento20 páginasBMW Transmission FundamentalsChrisGuile4186Aún no hay calificaciones
- Plastic ShredderDocumento23 páginasPlastic ShredderJojimar JulianAún no hay calificaciones
- Bullet Valve Series GuideDocumento2 páginasBullet Valve Series GuideAnthony PecorinoAún no hay calificaciones
- CanningDocumento39 páginasCanningvalerieAún no hay calificaciones
- Pds - Glenium C 317Documento2 páginasPds - Glenium C 317Doby YuniardiAún no hay calificaciones
- Pavement Materials: Highway and Transportation Engineering (Faculty of Engineering)Documento38 páginasPavement Materials: Highway and Transportation Engineering (Faculty of Engineering)atharAún no hay calificaciones
- Internship Report CRDocumento22 páginasInternship Report CRRockyXYZAún no hay calificaciones
- Reaktor (R-01) DesignDocumento5 páginasReaktor (R-01) DesignalAún no hay calificaciones
- HD8765 47 PDFDocumento109 páginasHD8765 47 PDFArsenie GeorgeAún no hay calificaciones
- 39 Tractor EmulsionDocumento4 páginas39 Tractor EmulsionJaga NathAún no hay calificaciones
- Estacion Manual Direccionable 52013 PDFDocumento2 páginasEstacion Manual Direccionable 52013 PDFLuis Ivan Moreno ParraAún no hay calificaciones
- Insulate Walls to Meet Building CodesDocumento18 páginasInsulate Walls to Meet Building CodesAlberto LeónAún no hay calificaciones
- Belayab Machine Manual Last 2Documento14 páginasBelayab Machine Manual Last 2abdiAún no hay calificaciones
- TACO Hydronics Step by StepDocumento45 páginasTACO Hydronics Step by Stepminiongsky100% (4)
- Kobe Works eDocumento13 páginasKobe Works eJagdish ShresthaAún no hay calificaciones
- KSB OmegaDocumento2 páginasKSB OmegaAnne 90Aún no hay calificaciones
- Rolling Friction FundamentalsDocumento19 páginasRolling Friction FundamentalsMuhammad AliAún no hay calificaciones
- SOP For Boiler Light Up ChecklistDocumento9 páginasSOP For Boiler Light Up Checklistpradeep.selvarajan100% (1)
- Powder Metallurgy LabDocumento8 páginasPowder Metallurgy Labשירי חדדAún no hay calificaciones
- Chapter 2 (Lecture 3)Documento25 páginasChapter 2 (Lecture 3)SchaieraAún no hay calificaciones
- Fabrication Failures and SolutionsDocumento3 páginasFabrication Failures and SolutionsSyed Muhammad Shukri Al-IdrusAún no hay calificaciones
- CH - Mass Transfer and Transport Phenomenon PDFDocumento29 páginasCH - Mass Transfer and Transport Phenomenon PDFRaghul RockAún no hay calificaciones
- 1 s2.0 S0263822315001993 MainDocumento10 páginas1 s2.0 S0263822315001993 MainShree BiradarAún no hay calificaciones
- Diseño Tambor CoqueDocumento0 páginasDiseño Tambor CoqueCesar Rodriigzz' BrachoAún no hay calificaciones
- 8000series Tech Datasheet 2018Documento3 páginas8000series Tech Datasheet 2018lucky414Aún no hay calificaciones
- Rain Water Alarm Project ReportDocumento10 páginasRain Water Alarm Project ReportAnish75% (4)
- NETZSCH Progressing Cavity Pumps 04 16aDocumento28 páginasNETZSCH Progressing Cavity Pumps 04 16aCarlos TomeyAún no hay calificaciones
- Heat Load Calculation IIDocumento2 páginasHeat Load Calculation IIsiruslara6491Aún no hay calificaciones
- Samsung Refrigeretor - RS265TD Fast Track R2Documento6 páginasSamsung Refrigeretor - RS265TD Fast Track R2Dan DrambareanuAún no hay calificaciones
- 496-2032-Gates Drive BeltComponents Catalogue November 2009Documento324 páginas496-2032-Gates Drive BeltComponents Catalogue November 2009tttyyyuuu12350% (2)
- Recycling ConcreteDocumento56 páginasRecycling ConcreteReshmita PallaAún no hay calificaciones