También podría gustarte
- Charts For Cofficents of Moments For Continous BeamsDocumento19 páginasCharts For Cofficents of Moments For Continous Beamsfat470Aún no hay calificaciones
- Automatic Multipurpose Agribot Using Arduino Mega and GPS Module ReceiverDocumento9 páginasAutomatic Multipurpose Agribot Using Arduino Mega and GPS Module ReceiverInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Smart Irrigation SystemDocumento6 páginasSmart Irrigation SystemSargonan RaviAún no hay calificaciones
- Australia Rainwater Harvesting Australia - ReferencesDocumento10 páginasAustralia Rainwater Harvesting Australia - ReferencesFree Rain Garden ManualsAún no hay calificaciones
- Automatic Field Irrigation SystemDocumento7 páginasAutomatic Field Irrigation SystemIJRASETPublicationsAún no hay calificaciones
- Automated Irrigation System Based On Soil Moisture SensorDocumento7 páginasAutomated Irrigation System Based On Soil Moisture SensorIJRASETPublicationsAún no hay calificaciones
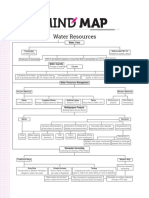
- Water Resources Mind MapDocumento1 páginaWater Resources Mind Mapanubhav deshwal100% (9)
- Thesis Suitability of Rooftop Rainwater HarvestingDocumento71 páginasThesis Suitability of Rooftop Rainwater HarvestingKamal Ziaul IslamAún no hay calificaciones
- Water in The PhilippinesDocumento5 páginasWater in The PhilippinesHannah MorataAún no hay calificaciones
- Smart Agriculture Using AutomationDocumento5 páginasSmart Agriculture Using AutomationInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Grade 8-Design Thinking WorksheetDocumento4 páginasGrade 8-Design Thinking WorksheetKeshav Chaitan VinodkumarAún no hay calificaciones
- How to Create Vibrant Smart Villages in the WorldDe EverandHow to Create Vibrant Smart Villages in the WorldAún no hay calificaciones
- Water PollutionDocumento16 páginasWater Pollutionwan habibahAún no hay calificaciones
- URA - Designing Our City Supplement - July12Documento17 páginasURA - Designing Our City Supplement - July12Dinesh PerumalAún no hay calificaciones
- Chennai DSP Survey PDFDocumento450 páginasChennai DSP Survey PDFPlokijAún no hay calificaciones
- A Smart Farming and "Crop Monitoring Technology" in Agriculture Using IOTDocumento11 páginasA Smart Farming and "Crop Monitoring Technology" in Agriculture Using IOTIJRASETPublicationsAún no hay calificaciones
- IoT Based Smart Irrigation SystemDocumento4 páginasIoT Based Smart Irrigation SystemEditor IJTSRD100% (1)
- T14 RespondentDocumento26 páginasT14 RespondentNaveen KumarAún no hay calificaciones
- Intelligent Field Automation SystemDocumento6 páginasIntelligent Field Automation SystemIJAR JOURNALAún no hay calificaciones
- Comments:: Chapter OneDocumento28 páginasComments:: Chapter OneVictor ImehAún no hay calificaciones
- IoT Based Agriculture Field MonitoringDocumento45 páginasIoT Based Agriculture Field MonitoringakashlogicAún no hay calificaciones
- Automatic Plant Irrigation System Based On Soil Moisture and Monitoring Using IotDocumento5 páginasAutomatic Plant Irrigation System Based On Soil Moisture and Monitoring Using IotShailendra SharmaAún no hay calificaciones
- A Concise Survey Paper On Automated Plant Irrigation SystemDocumento7 páginasA Concise Survey Paper On Automated Plant Irrigation SystemIJRASETPublicationsAún no hay calificaciones
- Final Report123Documento85 páginasFinal Report123NiharikaAún no hay calificaciones
- A Research Paper On Auto Controlling Irrigation System Using Arduino UNODocumento8 páginasA Research Paper On Auto Controlling Irrigation System Using Arduino UNOIJRASETPublicationsAún no hay calificaciones
- Cej 3919fDocumento14 páginasCej 3919fshital shermaleAún no hay calificaciones
- Drip Irrigation Report 2Documento20 páginasDrip Irrigation Report 2Siddharth DeshmukhAún no hay calificaciones
- A Review On Modern Irrigation Technologies For Water ManagementDocumento11 páginasA Review On Modern Irrigation Technologies For Water ManagementDaniela HossuAún no hay calificaciones
- Ijeta V5i2p33 PDFDocumento12 páginasIjeta V5i2p33 PDFRupesh kumarAún no hay calificaciones
- Implementation of IoT Technology in Automation of Irrigation SystemDocumento6 páginasImplementation of IoT Technology in Automation of Irrigation SystemInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Precision Agriculture For Water Management Using IOT: Mrs. Suvarna J. Patil Mr. Amol PatilDocumento3 páginasPrecision Agriculture For Water Management Using IOT: Mrs. Suvarna J. Patil Mr. Amol PatilEditor IJRITCCAún no hay calificaciones
- Arduino-based auto irrigation systemDocumento37 páginasArduino-based auto irrigation systemSai Charan GAún no hay calificaciones
- Smart Drip Irrigation System Using IOTDocumento8 páginasSmart Drip Irrigation System Using IOTAkshath KandlurAún no hay calificaciones
- Design and Implementation of A Smart Irrigation System: July 2022Documento9 páginasDesign and Implementation of A Smart Irrigation System: July 2022seth fernandoAún no hay calificaciones
- Jiot 2020 3036126Documento8 páginasJiot 2020 3036126jagveer singh BhakarAún no hay calificaciones
- Smart Irrigation SystemDocumento12 páginasSmart Irrigation SystemT.M. MEHRAB HASANAún no hay calificaciones
- SmartfarmDocumento16 páginasSmartfarmJames WandiyaAún no hay calificaciones
- Sensor Based Automatic Irrigation System PDFDocumento3 páginasSensor Based Automatic Irrigation System PDFHermawan LesmanaAún no hay calificaciones
- A Review and Proposed Automated Irrigation System Using Soil Moisture Sensor and Android AppDocumento9 páginasA Review and Proposed Automated Irrigation System Using Soil Moisture Sensor and Android AppHarsh Vardhan Singh TomarAún no hay calificaciones
- Automatic Irrigation SystemDocumento5 páginasAutomatic Irrigation SystembabuAún no hay calificaciones
- Study of Irrigation System by Using Internet of ThingsDocumento3 páginasStudy of Irrigation System by Using Internet of ThingsInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- IOT Based Smart Agriculture System: Sushanth.g@christuniversity - in Sujatha.s@christuniversity - inDocumento4 páginasIOT Based Smart Agriculture System: Sushanth.g@christuniversity - in Sujatha.s@christuniversity - inMichael Alcantara ManuelAún no hay calificaciones
- Iot-Based Intelligent Irrigation System For Paddy Crop Using An Internet-Controlled Water PumpDocumento16 páginasIot-Based Intelligent Irrigation System For Paddy Crop Using An Internet-Controlled Water PumpalanAún no hay calificaciones
- Ijemsv8n1 08Documento12 páginasIjemsv8n1 08Yeshwanth Surya VelayuthamAún no hay calificaciones
- 2023 V14i5012Documento6 páginas2023 V14i5012babblubabblu295Aún no hay calificaciones
- IoT - Article - Pawar2019-Design of An IoT Enabled Automated Hydroponics System Using NodeMCU and BlynkDocumento6 páginasIoT - Article - Pawar2019-Design of An IoT Enabled Automated Hydroponics System Using NodeMCU and BlynkRoberto VelazquezAún no hay calificaciones
- K A MallikaDocumento9 páginasK A MallikaPASUPULA JAGADEESHAún no hay calificaciones
- Chapter 1Documento9 páginasChapter 1Adrian Nicolas TanioAún no hay calificaciones
- Daffodil International University: AssignmentDocumento12 páginasDaffodil International University: AssignmentShuvoAún no hay calificaciones
- Design and Construction of A Solar-Powered Automatic Irrigation System With IOT SupportDocumento11 páginasDesign and Construction of A Solar-Powered Automatic Irrigation System With IOT SupportDeepak TiwariAún no hay calificaciones
- Article - Nalwade - 2017-Hydroponic FarmingDocumento6 páginasArticle - Nalwade - 2017-Hydroponic FarmingRoberto VelazquezAún no hay calificaciones
- Smart Irrigation System: AbstractDocumento14 páginasSmart Irrigation System: AbstractSher KGAún no hay calificaciones
- Smart Irrigation System Based On Soil Moisture Using IotDocumento5 páginasSmart Irrigation System Based On Soil Moisture Using IotSureshkumar AlagarsamyAún no hay calificaciones
- Sem ProjectDocumento6 páginasSem Projecteyuel tesfayeAún no hay calificaciones
- Dahane 2020Documento6 páginasDahane 2020Avishek JanaAún no hay calificaciones
- Prabha2018 PDFDocumento7 páginasPrabha2018 PDFthameezaAún no hay calificaciones
- Base Paper 1 SISDocumento4 páginasBase Paper 1 SISDeepika YAún no hay calificaciones
- Automatic Fertigation SystemDocumento12 páginasAutomatic Fertigation SystemIJRASETPublicationsAún no hay calificaciones
- Design and Implementation of Real Time Irrigation System Using A Wireless Sensor NetworkDocumento4 páginasDesign and Implementation of Real Time Irrigation System Using A Wireless Sensor NetworkBalaji DuraiyanAún no hay calificaciones
- Smart Irrigation SystemDocumento23 páginasSmart Irrigation SystemmoskovbringerAún no hay calificaciones
- Arduino Automatic Plant Irrigation Using Soil Moisture SensorsDocumento5 páginasArduino Automatic Plant Irrigation Using Soil Moisture SensorsRaymond BaldelovarAún no hay calificaciones
- Automatic Plant Irrigation System Using ArduinoDocumento5 páginasAutomatic Plant Irrigation System Using ArduinoGreat TopicsAún no hay calificaciones
- Design and Development of An Irrigation Mobile RobotDocumento16 páginasDesign and Development of An Irrigation Mobile RobotIAES International Journal of Robotics and AutomationAún no hay calificaciones
- IOT Based Plant Monitoring with Auto Irrigation & Disease DetectionDocumento7 páginasIOT Based Plant Monitoring with Auto Irrigation & Disease DetectionKarthik DmAún no hay calificaciones
- Irjet-Automatic Irrigation System Using Arduino: Related PapersDocumento4 páginasIrjet-Automatic Irrigation System Using Arduino: Related PapersglezzyAún no hay calificaciones
- Research_PaperDocumento10 páginasResearch_PaperlikithmoremdAún no hay calificaciones
- Iot Based Smart Sprinkling System: Rana Johar, Ahmed Bensenouci, Sieee Mohamed-Amine BensenouciDocumento6 páginasIot Based Smart Sprinkling System: Rana Johar, Ahmed Bensenouci, Sieee Mohamed-Amine BensenouciJANANI VENKATESANAún no hay calificaciones
- Chapter One Background of The StudyDocumento3 páginasChapter One Background of The StudyvectorAún no hay calificaciones
- Automated Solar Powered Irrigation System: Page No:1 Lodha Kalyani BipinchandDocumento20 páginasAutomated Solar Powered Irrigation System: Page No:1 Lodha Kalyani BipinchandLodha KalyaniAún no hay calificaciones
- Smart Farming Using IoTDocumento5 páginasSmart Farming Using IoTInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- IJETR033013Documento8 páginasIJETR033013erpublicationAún no hay calificaciones
- IJETR033040Documento3 páginasIJETR033040erpublicationAún no hay calificaciones
- IJETR033077Documento6 páginasIJETR033077erpublicationAún no hay calificaciones
- IJETR033053Documento4 páginasIJETR033053erpublicationAún no hay calificaciones
- IJETR033069Documento6 páginasIJETR033069erpublicationAún no hay calificaciones
- IJETR033049Documento5 páginasIJETR033049erpublicationAún no hay calificaciones
- IJETR033082Documento4 páginasIJETR033082erpublicationAún no hay calificaciones
- IJETR033060Documento6 páginasIJETR033060erpublicationAún no hay calificaciones
- IJETR033043Documento6 páginasIJETR033043erpublicationAún no hay calificaciones
- IJETR033079Documento4 páginasIJETR033079erpublicationAún no hay calificaciones
- IJETR033055Documento9 páginasIJETR033055erpublicationAún no hay calificaciones
- IJETR033063Documento3 páginasIJETR033063erpublicationAún no hay calificaciones
- Matlab and Simulink Based Simulation of Wideband Code Division Multiple Access (WCDMA)Documento6 páginasMatlab and Simulink Based Simulation of Wideband Code Division Multiple Access (WCDMA)erpublicationAún no hay calificaciones
- IJETR033062Documento2 páginasIJETR033062erpublicationAún no hay calificaciones
- IJETR032923Documento5 páginasIJETR032923erpublicationAún no hay calificaciones
- IJETR033051Documento2 páginasIJETR033051erpublicationAún no hay calificaciones
- IJETR033047Documento4 páginasIJETR033047erpublicationAún no hay calificaciones
- IJETR033050Documento6 páginasIJETR033050erpublicationAún no hay calificaciones
- IJETR033035Documento5 páginasIJETR033035erpublicationAún no hay calificaciones
- Thermal Analysis of Motor Controller For Electric Vehicle: Jian-Ping Wen, Chao XuDocumento3 páginasThermal Analysis of Motor Controller For Electric Vehicle: Jian-Ping Wen, Chao XuerpublicationAún no hay calificaciones
- Recognition of Heterogeneous Faces Using Kernel Principal Component AnalysisDocumento4 páginasRecognition of Heterogeneous Faces Using Kernel Principal Component AnalysiserpublicationAún no hay calificaciones
- IJETR033033Documento4 páginasIJETR033033erpublicationAún no hay calificaciones
- The Effect of Focus On Spectral Emphasis For Disyllabic Words in ChineseDocumento4 páginasThe Effect of Focus On Spectral Emphasis For Disyllabic Words in ChineseerpublicationAún no hay calificaciones
- IJETR033012Documento7 páginasIJETR033012erpublicationAún no hay calificaciones
- IJETR033011Documento3 páginasIJETR033011erpublicationAún no hay calificaciones
- ADRC Speed Control of IPMSM With Current Regulator: Wen Jianping, Zhang XuhuiDocumento3 páginasADRC Speed Control of IPMSM With Current Regulator: Wen Jianping, Zhang XuhuierpublicationAún no hay calificaciones
- IJETR032922Documento6 páginasIJETR032922erpublicationAún no hay calificaciones
- IJETR032909Documento11 páginasIJETR032909erpublicationAún no hay calificaciones
- IJETR032918Documento12 páginasIJETR032918erpublicationAún no hay calificaciones
- Analysis On Spatial Variation of Rainfall and Groundwater Fluctuation in Hebballa Watershed, Mysore District, Karnataka, IndiaDocumento7 páginasAnalysis On Spatial Variation of Rainfall and Groundwater Fluctuation in Hebballa Watershed, Mysore District, Karnataka, IndiaEditor IJTSRDAún no hay calificaciones
- 15 NeyrpicDocumento5 páginas15 Neyrpictestem156845Aún no hay calificaciones
- De Vries - 2015 - Sustainability ScienceDocumento620 páginasDe Vries - 2015 - Sustainability ScienceLuz SantiAún no hay calificaciones
- Machakos County Development Plan InsightsDocumento210 páginasMachakos County Development Plan Insightsedwin_nyanducha3013Aún no hay calificaciones
- UN/ECE Task Force Problem Oriented Approach IndicatorsDocumento68 páginasUN/ECE Task Force Problem Oriented Approach IndicatorsOcta Yusak PurajaAún no hay calificaciones
- Natural Resource Management in The Mountain Environment: - Experiences From The Doon Valley, IndiaDocumento77 páginasNatural Resource Management in The Mountain Environment: - Experiences From The Doon Valley, Indiasameer AhadAún no hay calificaciones
- Irrigation Water Management: Rajat Mishra Asst. Professor Civil Engineering DepartmentDocumento24 páginasIrrigation Water Management: Rajat Mishra Asst. Professor Civil Engineering DepartmentDileesha WeliwaththaAún no hay calificaciones
- China's Water-Saving Irrigation Management System: Policy, Implementation, and ChallengeDocumento17 páginasChina's Water-Saving Irrigation Management System: Policy, Implementation, and ChallengeNguyen Van KienAún no hay calificaciones
- Technologies For Sustainable Rural Livelihood in North East IndiaDocumento9 páginasTechnologies For Sustainable Rural Livelihood in North East IndiaAnupal GoswamiAún no hay calificaciones
- Embedded Controlled Drip Irrigation SystemDocumento5 páginasEmbedded Controlled Drip Irrigation SystemInternational Journal of Application or Innovation in Engineering & ManagementAún no hay calificaciones
- Bangladesh National Conservation StrategyDocumento22 páginasBangladesh National Conservation StrategySaeed ShawonAún no hay calificaciones
- Emilia BocanegraDocumento279 páginasEmilia BocanegraRuliansyah LAún no hay calificaciones
- Geography Optional Paper II Previous Year’s Questions Topic Wise ListingDocumento43 páginasGeography Optional Paper II Previous Year’s Questions Topic Wise ListingAakansha GuptaAún no hay calificaciones
- Employment NewsDocumento41 páginasEmployment NewsMeetinderAún no hay calificaciones
- Nimapara Irrigation DivisionDocumento60 páginasNimapara Irrigation DivisionMithunAún no hay calificaciones
- Delaware ESC Handbook - 06-05Documento689 páginasDelaware ESC Handbook - 06-05joeldlrosa0Aún no hay calificaciones
- Environmental Problems of AravaliDocumento236 páginasEnvironmental Problems of Aravalipj10_rulesAún no hay calificaciones
- Ecological Indicators: Original ArticlesDocumento19 páginasEcological Indicators: Original ArticlesMaria Luisa VarillasAún no hay calificaciones
- ANALYSIS OF REHABILITATION PRIORITY FOR IRRIGATION INFRASTRUCTUREDocumento8 páginasANALYSIS OF REHABILITATION PRIORITY FOR IRRIGATION INFRASTRUCTUREChristian PongsitammuAún no hay calificaciones
- Dairying and Declining Water QualityDocumento33 páginasDairying and Declining Water QualityRoyal Forest and Bird Protecton SocietyAún no hay calificaciones
- Agriculture: Vision 2023 - Strategic Initiatives in AgricultureDocumento21 páginasAgriculture: Vision 2023 - Strategic Initiatives in AgricultureAshwin BalajiAún no hay calificaciones