También podría gustarte
- Erick EriksonDocumento11 páginasErick EriksonMaritaElizabethAún no hay calificaciones
- El Debate de Valladolid 6toDocumento1 páginaEl Debate de Valladolid 6toMaritaElizabethAún no hay calificaciones
- Psicologia 1Documento24 páginasPsicologia 1MaritaElizabethAún no hay calificaciones
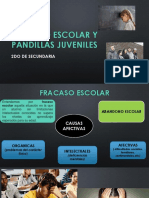
- Fracaso Escolar y Pandillas JuvenilesDocumento6 páginasFracaso Escolar y Pandillas JuvenilesMaritaElizabethAún no hay calificaciones
- El Cuento de La Neurona RamonaDocumento3 páginasEl Cuento de La Neurona RamonaMaritaElizabeth100% (5)
- Conceptualización de PersonaDocumento7 páginasConceptualización de PersonaMaritaElizabethAún no hay calificaciones
- Principios Logicos Supremos y Teoria de RazonamientoDocumento7 páginasPrincipios Logicos Supremos y Teoria de RazonamientoMaritaElizabeth100% (1)
- Figuras y Modos Del SilogismoDocumento7 páginasFiguras y Modos Del SilogismoMaritaElizabethAún no hay calificaciones
- Bolivia Ante Los Problemas Universales de La Deshumanizacion PDFDocumento1 páginaBolivia Ante Los Problemas Universales de La Deshumanizacion PDFMaritaElizabeth100% (2)