También podría gustarte
- G02 MDNTDocumento16 páginasG02 MDNTAlvaro CastilloAún no hay calificaciones
- Calendario Cursos RA - Colombia - 2020Documento2 páginasCalendario Cursos RA - Colombia - 2020Alvaro CastilloAún no hay calificaciones
- Webinar SOLUCIÓN EN TABLEROS PARA SISTEMAS DE BOMBEO 13 de AgostoDocumento61 páginasWebinar SOLUCIÓN EN TABLEROS PARA SISTEMAS DE BOMBEO 13 de AgostoAlvaro CastilloAún no hay calificaciones
- AndresArias AnaMena 2009Documento116 páginasAndresArias AnaMena 2009Alvaro CastilloAún no hay calificaciones
- Ficha Tecnica - Silla K - V2Documento2 páginasFicha Tecnica - Silla K - V2Alvaro CastilloAún no hay calificaciones
- Inventor Basico 2016Documento4 páginasInventor Basico 2016Alvaro CastilloAún no hay calificaciones
- Aritmetica Recreativa - YakovDocumento239 páginasAritmetica Recreativa - YakovAlvaro CastilloAún no hay calificaciones
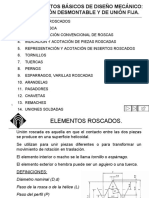
- Elem - Basicos Diseño MecanicoDocumento36 páginasElem - Basicos Diseño MecanicoJuli CaputoAún no hay calificaciones
- Construcción de Una Fresadora CNC Como Prototipo Experimental v2Documento124 páginasConstrucción de Una Fresadora CNC Como Prototipo Experimental v2Alvaro Castillo100% (1)
- Mini SumoDocumento14 páginasMini SumoAlvaro CastilloAún no hay calificaciones
- Recuperación Del Banco de Pruebas Del Ciclo de Refrigeración Por Compresión de Vapor y Bomba de CalorDocumento4 páginasRecuperación Del Banco de Pruebas Del Ciclo de Refrigeración Por Compresión de Vapor y Bomba de CalorAlvaro CastilloAún no hay calificaciones
- MangoDocumento2 páginasMangoGénesisAún no hay calificaciones
- Gas Natural 2010Documento107 páginasGas Natural 2010rondador23100% (4)
- Vod 12Documento18 páginasVod 12Richard Cortez SosaAún no hay calificaciones
- Temario Fundamentos de MatemáticasDocumento5 páginasTemario Fundamentos de MatemáticasMitzel GarciaAún no hay calificaciones
- Numeros Adimensionales Transferencia de CalorDocumento2 páginasNumeros Adimensionales Transferencia de CalorMau Jiménez100% (1)
- Continua Calor y TemperaturaDocumento13 páginasContinua Calor y Temperaturarosa luzAún no hay calificaciones
- Taller 2 Diseño de Compensadores Basados en La Respuesta en El Tiempo Utilizando La Herramienta Sisotool PDFDocumento26 páginasTaller 2 Diseño de Compensadores Basados en La Respuesta en El Tiempo Utilizando La Herramienta Sisotool PDFJulian AlcalaAún no hay calificaciones
- Preset - MVCSDocumento4 páginasPreset - MVCSRoxana CusacaniAún no hay calificaciones
- Actividad de Aprendizaje 4-3Documento2 páginasActividad de Aprendizaje 4-3clementevasquezmirenaAún no hay calificaciones
- Problemas Propuestos Sistemas LinealesDocumento4 páginasProblemas Propuestos Sistemas LinealesCesar CRAún no hay calificaciones
- MANIDocumento8 páginasMANICoco MirandiAún no hay calificaciones
- Las ConicasDocumento7 páginasLas ConicasgarcarlosAún no hay calificaciones
- Ag 3 TMetodos BusquedaDocumento21 páginasAg 3 TMetodos BusquedaGerard Erick Toscano AstoAún no hay calificaciones
- Practica 3 EPADocumento8 páginasPractica 3 EPAJoshep Luiss GonzalezAún no hay calificaciones
- Guia 6 - Proporcionalidad Directa e Inversa PDFDocumento2 páginasGuia 6 - Proporcionalidad Directa e Inversa PDFLas Manitas Ticky NaddafAún no hay calificaciones
- Ing. Arancibia - Mecanica-ElectromecanicaDocumento5 páginasIng. Arancibia - Mecanica-ElectromecanicaJose Ignacio Lopez AlmanzaAún no hay calificaciones
- Microprocesadores para SmartphoneDocumento44 páginasMicroprocesadores para SmartphoneHerbert ConsolaciónAún no hay calificaciones
- Leister Triac-St EsDocumento4 páginasLeister Triac-St EsIvonne DelgadoAún no hay calificaciones
- Estática Aplicada PDFDocumento3 páginasEstática Aplicada PDFJuanJoseVasquezCastilloAún no hay calificaciones
- Manual Topcon ES Series Espanol PDFDocumento77 páginasManual Topcon ES Series Espanol PDFcristofer_cristianAún no hay calificaciones
- Ensayo Del Sensor de AceleracionDocumento4 páginasEnsayo Del Sensor de AceleracionMario VerdeAún no hay calificaciones
- Patologias en Instalaciones HidrosanitariasDocumento60 páginasPatologias en Instalaciones HidrosanitariasJuan Zarate100% (1)
- C Bplus T2 H2 UG Es 20170109Documento74 páginasC Bplus T2 H2 UG Es 20170109Fernando MorenoAún no hay calificaciones
- Paso A Paso Coagulación y FloculaciónDocumento12 páginasPaso A Paso Coagulación y Floculaciónjuan pabloAún no hay calificaciones
- ESTRUCTURAS NAVALES I - 6ta SemanaDocumento21 páginasESTRUCTURAS NAVALES I - 6ta SemanaDiego RamosAún no hay calificaciones
- Práctica 9. Lapiz LabialDocumento8 páginasPráctica 9. Lapiz Labialmarcos613Aún no hay calificaciones
- Curso PythonDocumento97 páginasCurso PythonAprender Libre100% (1)
- Informe Final Construccion TrasfoDocumento9 páginasInforme Final Construccion TrasfoOscar Andres Ramirez RodriguezAún no hay calificaciones
- PROTOCOLO PRACTICA # 9 Enzimas IIDocumento8 páginasPROTOCOLO PRACTICA # 9 Enzimas IIAlejandro T. Arenas VillacortaAún no hay calificaciones