También podría gustarte
- Normas VdiDocumento5 páginasNormas VdiBrandon Ariel100% (2)
- Ejercicios Del Libro WALPOLEDocumento10 páginasEjercicios Del Libro WALPOLEXimena Villar MartosAún no hay calificaciones
- Diseño de Elementos de MaquinasDocumento1 páginaDiseño de Elementos de MaquinasRicardo Daniel Castillo RojasAún no hay calificaciones
- Informe InstruDocumento28 páginasInforme InstruRicardo Daniel Castillo RojasAún no hay calificaciones
- AlcoholismoDocumento15 páginasAlcoholismoItzel MinuizAún no hay calificaciones
- Lenguajes de Descripcin de Hardware PDFDocumento4 páginasLenguajes de Descripcin de Hardware PDFIsaac DiazAún no hay calificaciones
- Informe HDocumento8 páginasInforme HRicardo Daniel Castillo RojasAún no hay calificaciones
- Diametros BrocasDocumento1 páginaDiametros BrocasDiana Carolina LeonAún no hay calificaciones
- Estatica ProblemasDocumento54 páginasEstatica ProblemasJavier ViverosAún no hay calificaciones
- Informe HDocumento8 páginasInforme HRicardo Daniel Castillo RojasAún no hay calificaciones
- Cont 1Documento144 páginasCont 1Ricardo Daniel Castillo RojasAún no hay calificaciones
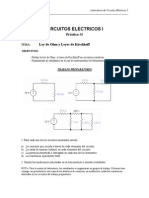
- Practica 2Documento3 páginasPractica 2Ricardo Daniel Castillo RojasAún no hay calificaciones
- Universidad Mayor de San Andrés: Facultad de Ciencias Puras Y Naturales Carrera de InformáticaDocumento94 páginasUniversidad Mayor de San Andrés: Facultad de Ciencias Puras Y Naturales Carrera de InformáticaLuis Felix Martinez LunaAún no hay calificaciones
- Laser y Luz Pulsada IntensaDocumento42 páginasLaser y Luz Pulsada IntensaluzAún no hay calificaciones
- Apuntes MatricesDocumento9 páginasApuntes MatricesFelix Maniega CalvoAún no hay calificaciones
- Desarrolo y Analis Tecnico de Un Nuevo Fluidi de Perforacion Base Agua de Mar UNIVERSIDAD - NACIONAL - AUTONOMA - DE - MEXICO PDFDocumento124 páginasDesarrolo y Analis Tecnico de Un Nuevo Fluidi de Perforacion Base Agua de Mar UNIVERSIDAD - NACIONAL - AUTONOMA - DE - MEXICO PDFWilliam RocaAún no hay calificaciones
- Péndulo de TorsiónDocumento31 páginasPéndulo de TorsiónJävïër JøsëAún no hay calificaciones
- Mat1 Ficha1Documento6 páginasMat1 Ficha1Martín Rcl Glln GrcAún no hay calificaciones
- Aparato Urinario Anatomia y FisiologiaDocumento11 páginasAparato Urinario Anatomia y Fisiologiayordane quispe delgadoAún no hay calificaciones
- Memoria de CalculoDocumento16 páginasMemoria de CalculoRoman Eduardo Brito Galeana100% (1)
- Cuadriláteros Circunferencia PirmeroDocumento7 páginasCuadriláteros Circunferencia PirmeroAndreaAún no hay calificaciones
- Anexos de CálculosDocumento49 páginasAnexos de CálculosMaria ElenaAún no hay calificaciones
- Wallace - Todo y MasDocumento600 páginasWallace - Todo y MasLedy Cristina Guerra ZapataAún no hay calificaciones
- Construcción de Un Cargador de Celular PortátilDocumento4 páginasConstrucción de Un Cargador de Celular PortátilJose AmbrocioAún no hay calificaciones
- "Power Drive Xceed" para Optimizar La Velocidad de Penetración en El Tramo 9 5/8 Del Pozo Surubí C-8Documento146 páginas"Power Drive Xceed" para Optimizar La Velocidad de Penetración en El Tramo 9 5/8 Del Pozo Surubí C-8Carmen Teresa Medrano100% (1)
- Conveccion Natural en Placas H y VDocumento12 páginasConveccion Natural en Placas H y VFernanda TenesacaAún no hay calificaciones
- Volumetria de Precipitacion Determinacion de ClorurosDocumento9 páginasVolumetria de Precipitacion Determinacion de ClorurosRudy Mamani CuellarAún no hay calificaciones
- Practica #2 Lineas de EquilibrioDocumento15 páginasPractica #2 Lineas de EquilibrioErikaCorderoLópezAún no hay calificaciones
- Cap 3 - Modelo MineralogicoDocumento18 páginasCap 3 - Modelo MineralogicoHilda Urdiales CruzAún no hay calificaciones
- 10 Informe Final ArtemiaDocumento35 páginas10 Informe Final Artemiajesusvivas1969Aún no hay calificaciones
- NCh-ISO 22117-2013-043 PDFDocumento41 páginasNCh-ISO 22117-2013-043 PDFSandra RamirezAún no hay calificaciones
- MarbleDocumento2 páginasMarbleMarcelo Ariel ManesAún no hay calificaciones
- Práctica Teórica #7 Ine-300Documento7 páginasPráctica Teórica #7 Ine-300qwertgo619Aún no hay calificaciones
- Reglamentación Sobre Líneas Subterráneas FinalDocumento55 páginasReglamentación Sobre Líneas Subterráneas FinalAoPo - DEyP Municipalidad de CórdobaAún no hay calificaciones
- Tema 4 y 5 MetodologíaDocumento5 páginasTema 4 y 5 MetodologíaLuna LlenaAún no hay calificaciones
- Previo 1 de Fisica de OndasDocumento5 páginasPrevio 1 de Fisica de Ondasoscar parkerAún no hay calificaciones
- Folleto Lofis + Econ.Documento39 páginasFolleto Lofis + Econ.Roy Perez-AcuñaAún no hay calificaciones
- Recalces Y Refuerzos en Las Cimentaciones: Capitulo VDocumento20 páginasRecalces Y Refuerzos en Las Cimentaciones: Capitulo VJimenez PJAún no hay calificaciones
- PRACTICA InductanciaDocumento6 páginasPRACTICA InductanciaLeidy RuizAún no hay calificaciones
- Mecánica 2 BachilleratoDocumento11 páginasMecánica 2 BachilleratoPepito DIAún no hay calificaciones
- Informe de Redes SemanticasDocumento8 páginasInforme de Redes SemanticasYadira chicaiza0% (1)