También podría gustarte
- Project Report of Power Electronics Lab: Project Title: 9-Level Inverter Using ArduinoDocumento17 páginasProject Report of Power Electronics Lab: Project Title: 9-Level Inverter Using ArduinoAhmadAún no hay calificaciones
- XRY-1A Oxygen Bomb CalorimeterDocumento16 páginasXRY-1A Oxygen Bomb CalorimeterFrank.J83% (6)
- Bee Micro ProjectDocumento14 páginasBee Micro Projectsolomonsanjiv883Aún no hay calificaciones
- Minor Project Front PagesDocumento13 páginasMinor Project Front PagesAbhishek MeAún no hay calificaciones
- A Synopsis Report ON Speed Control of DC Motor Using Arduino Microcontroller Board and PWMDocumento14 páginasA Synopsis Report ON Speed Control of DC Motor Using Arduino Microcontroller Board and PWMsaikumarAún no hay calificaciones
- Magnetic GearDocumento28 páginasMagnetic GearGeetha Lekshmi KAún no hay calificaciones
- Solar Refrigerator & Air Cooler Technical ReportDocumento26 páginasSolar Refrigerator & Air Cooler Technical ReportBabu JmldAún no hay calificaciones
- A Seminar ReportDocumento28 páginasA Seminar ReportVenkatesh ReddyAún no hay calificaciones
- Report PDFDocumento5 páginasReport PDFAyon MandalAún no hay calificaciones
- "Frequency Locked Loop D.C. Motor Speed Control": Electrical & Electronics EngineeringDocumento21 páginas"Frequency Locked Loop D.C. Motor Speed Control": Electrical & Electronics Engineeringkanhaiya singhAún no hay calificaciones
- Project Report on "Name of ProjectDocumento42 páginasProject Report on "Name of ProjectYash TayadeAún no hay calificaciones
- Novel Modeling and Damping Technique For Hybrid Stepper MotorDocumento11 páginasNovel Modeling and Damping Technique For Hybrid Stepper MotorSathuluri Sambasiva RaoAún no hay calificaciones
- Multiobjective Optimisation of Wire-EDM of Inconel 718 Superalloy Using Grey Relational AnalysisDocumento30 páginasMultiobjective Optimisation of Wire-EDM of Inconel 718 Superalloy Using Grey Relational AnalysisAbhinav KumarAún no hay calificaciones
- Digital Phase Selector: A Mini-Project Report Submitted in Partial Fulfillment Requirements For The Award ofDocumento53 páginasDigital Phase Selector: A Mini-Project Report Submitted in Partial Fulfillment Requirements For The Award ofdondbAún no hay calificaciones
- Front PagesDocumento11 páginasFront PagesNitish Gupta PabaAún no hay calificaciones
- Square Wave Generator-1Documento35 páginasSquare Wave Generator-1Manpreetnoor AulakhAún no hay calificaciones
- Electrical Handbook Formula Book SampleDocumento73 páginasElectrical Handbook Formula Book Samplesnitin26100% (1)
- Wireless Powper Transmission Using ArdunioDocumento47 páginasWireless Powper Transmission Using Ardunioரவிக்குமார் பகுத்தறிவாளன்Aún no hay calificaciones
- Mitigation TechniquesDocumento59 páginasMitigation TechniquesPrakash ArumugamAún no hay calificaciones
- Moct ReportDocumento22 páginasMoct ReportSangam PoojaAún no hay calificaciones
- Diamond Security System in Museum: Mini Project ReportDocumento10 páginasDiamond Security System in Museum: Mini Project ReportChemudupati SunilAún no hay calificaciones
- Load Flow Studies With Upfc Power Injection Model: Mithu Sarkar Roll no-211EE2139Documento53 páginasLoad Flow Studies With Upfc Power Injection Model: Mithu Sarkar Roll no-211EE2139Tewodros ShegawAún no hay calificaciones
- Arduino Based Power Inverter Using Matlab Project ReportDocumento40 páginasArduino Based Power Inverter Using Matlab Project ReportRajat SharmaAún no hay calificaciones
- b13 Forced Commutation Using ArduinoDocumento62 páginasb13 Forced Commutation Using ArduinoAlexandru Stefan AndriesAún no hay calificaciones
- Control electric machine speed using FOPID and PID controllersDocumento26 páginasControl electric machine speed using FOPID and PID controllersJay prakash SahooAún no hay calificaciones
- merged_mergedDocumento93 páginasmerged_mergedharshiharshieAún no hay calificaciones
- P1519 Report II V2Documento58 páginasP1519 Report II V2Wasil BabarAún no hay calificaciones
- Industrial Training Report on Development of Electrical Control Panel and Isolation TransformerDocumento33 páginasIndustrial Training Report on Development of Electrical Control Panel and Isolation TransformerManmohan BishtAún no hay calificaciones
- Swami Darshananand Institute of Management & Technology: Deparment of Eletrical EngineeringDocumento10 páginasSwami Darshananand Institute of Management & Technology: Deparment of Eletrical Engineeringsanjaysinghcoer100% (1)
- PLC RDocumento36 páginasPLC RPrudhvi AllaAún no hay calificaciones
- Implementation of PWM Based Firing Scheme For Multilevel Inverter Using MicrocontrollerDocumento52 páginasImplementation of PWM Based Firing Scheme For Multilevel Inverter Using MicrocontrollerAbdulaziz MuhammedAún no hay calificaciones
- Power Quality Issues and Mitigation Techniques Using FACTS DevicesDocumento59 páginasPower Quality Issues and Mitigation Techniques Using FACTS Devicesdaniel assefaAún no hay calificaciones
- Analysis of Induction Motor Drive With Direct Torque Control Scheme Using Space Vector ModulationDocumento50 páginasAnalysis of Induction Motor Drive With Direct Torque Control Scheme Using Space Vector ModulationkfaliAún no hay calificaciones
- Circular 1573640299117 - Tricolite Industry Project ReportDocumento38 páginasCircular 1573640299117 - Tricolite Industry Project ReportLevelUp PresentsAún no hay calificaciones
- PMSM Motor TheoryDocumento87 páginasPMSM Motor TheoryKushagra KhamesraAún no hay calificaciones
- Project Report PujaDocumento32 páginasProject Report PujaAtul KumarAún no hay calificaciones
- Simulation & Analysis of Static Synchronous Compensator (STATCOM)Documento55 páginasSimulation & Analysis of Static Synchronous Compensator (STATCOM)bhargavAún no hay calificaciones
- Inverter ProjectDocumento15 páginasInverter Projectchiranjeet chandraAún no hay calificaciones
- Proj REPORT-1Documento43 páginasProj REPORT-120 O3 004 ARUN M NAún no hay calificaciones
- Design & Construction of 220 V Voltage StabilizerDocumento46 páginasDesign & Construction of 220 V Voltage StabilizerNitin VermaAún no hay calificaciones
- Modelling of Linear Permanent Magnet Motor For Air Vapor ComDocumento61 páginasModelling of Linear Permanent Magnet Motor For Air Vapor ComAime FarAún no hay calificaciones
- " Industrial Training ": Submitted in Partial Fulfilment of The Requirements of The Award of DegreeDocumento34 páginas" Industrial Training ": Submitted in Partial Fulfilment of The Requirements of The Award of DegreeSandesh OfficialAún no hay calificaciones
- Report ManishDocumento31 páginasReport ManishGirraj MeenaAún no hay calificaciones
- Design, Simulation & Implementation of Inverter: Technical ReportDocumento32 páginasDesign, Simulation & Implementation of Inverter: Technical ReportÑįrãj ÑáyäñAún no hay calificaciones
- GR8 PDFDocumento31 páginasGR8 PDFgiramach getahunAún no hay calificaciones
- Thesis 2Documento52 páginasThesis 2JeezoAún no hay calificaciones
- Nagi Seminar BookDocumento38 páginasNagi Seminar Booktalari nageswariAún no hay calificaciones
- Vamsi ThesisDocumento68 páginasVamsi ThesisRaghu RambugAún no hay calificaciones
- Seminar ReportDocumento49 páginasSeminar Reportdhruvi gandhiAún no hay calificaciones
- Protection Concept for 100kVA Hybrid TransformerDocumento32 páginasProtection Concept for 100kVA Hybrid TransformerANITTA VINCENTAún no hay calificaciones
- Automatic Fan Controller Project ReportDocumento14 páginasAutomatic Fan Controller Project ReportManish VadlakondaAún no hay calificaciones
- Design and Analysis of Single Phase Voltage Source Inverter Using Unipolar and Bipolar Pulse Width Modulation TechniquesDocumento7 páginasDesign and Analysis of Single Phase Voltage Source Inverter Using Unipolar and Bipolar Pulse Width Modulation TechniquesĐorđe ĐurđićAún no hay calificaciones
- Automatic Street Light System: Component-1)Documento7 páginasAutomatic Street Light System: Component-1)Syed AfthabAún no hay calificaciones
- Arduino Power Measurement for Electrical ThesisDocumento49 páginasArduino Power Measurement for Electrical ThesisPurba JoeAún no hay calificaciones
- Park Aid Material Circuit GuideDocumento42 páginasPark Aid Material Circuit GuidePoorna Chander RaoAún no hay calificaciones
- Major Project ReportDocumento49 páginasMajor Project Reportkmlkarthik15Aún no hay calificaciones
- Novel Hybrid Powerfactor Controller Project Report for Electrical Engineering DegreeDocumento60 páginasNovel Hybrid Powerfactor Controller Project Report for Electrical Engineering DegreesreeAún no hay calificaciones
- Project On Mobile Jammer and Detector Circuit (2021)Documento42 páginasProject On Mobile Jammer and Detector Circuit (2021)anupnaskar naskarAún no hay calificaciones
- Ppfinal6Documento36 páginasPpfinal62-Utkarsh AwatiAún no hay calificaciones
- Thesis 1st DraftDocumento59 páginasThesis 1st DraftRasheed KhattakAún no hay calificaciones
- Practical Power Distribution for IndustryDe EverandPractical Power Distribution for IndustryCalificación: 2.5 de 5 estrellas2.5/5 (2)
- Chapter 2Documento9 páginasChapter 2api-3696297Aún no hay calificaciones
- Massachusetts Institute of Technology: 2.1 Surface Magnet MachinesDocumento32 páginasMassachusetts Institute of Technology: 2.1 Surface Magnet MachinesJack SoAún no hay calificaciones
- MIT6 685F13 Chapter11 PDFDocumento6 páginasMIT6 685F13 Chapter11 PDFVinay SankhatAún no hay calificaciones
- Massachusetts Institute of Technology: 2.1 Linear CaseDocumento15 páginasMassachusetts Institute of Technology: 2.1 Linear CaseJack SoAún no hay calificaciones
- Massachusetts Institute of TechnologyDocumento12 páginasMassachusetts Institute of TechnologyPrakhar PandeyAún no hay calificaciones
- Fundamentals and Applications of ElectromagneticsDocumento9 páginasFundamentals and Applications of ElectromagneticsVinay SankhatAún no hay calificaciones
- Massachusetts Institute of Technology: Back IronDocumento10 páginasMassachusetts Institute of Technology: Back IronJack SoAún no hay calificaciones
- Lecture 5 - Symbolics Simulink, File IO, Building GUIsDocumento35 páginasLecture 5 - Symbolics Simulink, File IO, Building GUIsPedro DiasAún no hay calificaciones
- Massachusetts Institute of Technology: 1.1 GeometryDocumento17 páginasMassachusetts Institute of Technology: 1.1 GeometryJack SoAún no hay calificaciones
- AFCAT Question Paper Series BDocumento8 páginasAFCAT Question Paper Series BMota ChashmaAún no hay calificaciones
- Chapter 4Documento18 páginasChapter 4api-3696297Aún no hay calificaciones
- AFCAT Previous Year Paper Electrical and Electronics EKT 2 PDFDocumento4 páginasAFCAT Previous Year Paper Electrical and Electronics EKT 2 PDFVinay SankhatAún no hay calificaciones
- AFCAT Question Paper Series CDocumento8 páginasAFCAT Question Paper Series CMota ChashmaAún no hay calificaciones
- AFCAT 01-2015 Question Paper Booklet Series ADocumento8 páginasAFCAT 01-2015 Question Paper Booklet Series AVijay VijjuAún no hay calificaciones
- AFCAT Question Paper Series DDocumento8 páginasAFCAT Question Paper Series DMota ChashmaAún no hay calificaciones
- EKT+Question+series+JDocumento4 páginasEKT+Question+series+JMota ChashmaAún no hay calificaciones
- What Is Tertiary WindingDocumento3 páginasWhat Is Tertiary Windingchirag2011Aún no hay calificaciones
- Rohini 46645264742Documento5 páginasRohini 46645264742Faheem aktharAún no hay calificaciones
- Fluid Description of PlasmaDocumento10 páginasFluid Description of PlasmaDaniel HikaAún no hay calificaciones
- Career Endeavour Test Series1Documento13 páginasCareer Endeavour Test Series1Gugan Raj100% (1)
- 1001 Solved Problems in Engineering Mathematics by Excel Academic CouncilDocumento10 páginas1001 Solved Problems in Engineering Mathematics by Excel Academic CouncilJohn govanAún no hay calificaciones
- The Seepage Control of The Tunnel Excavated in High-Pressure Water Condition Using Multiple Times Grouting Method PDFDocumento17 páginasThe Seepage Control of The Tunnel Excavated in High-Pressure Water Condition Using Multiple Times Grouting Method PDFMarsheal FisongaAún no hay calificaciones
- MTL Grounding Tp1121-1Documento16 páginasMTL Grounding Tp1121-1mongo55Aún no hay calificaciones
- Uhs Model Paper 2008Documento16 páginasUhs Model Paper 2008Smith 4allAún no hay calificaciones
- Signals, Continuous Time and Discrete TimeDocumento27 páginasSignals, Continuous Time and Discrete TimeSukanta ParidaAún no hay calificaciones
- Inertia FormulasDocumento4 páginasInertia FormulasLoysa Agtarap MataAún no hay calificaciones
- Chapter 6 ACKulkarniDocumento43 páginasChapter 6 ACKulkarnipurijatinAún no hay calificaciones
- An Examination of Engine Effects On HelicopterDocumento10 páginasAn Examination of Engine Effects On HelicoptershyjusnairAún no hay calificaciones
- Olympiad KVPY Solutions NSEJSDocumento93 páginasOlympiad KVPY Solutions NSEJSRitvik NehraAún no hay calificaciones
- Ph501 Electrodynamics Problem Set 6: Princeton UniversityDocumento46 páginasPh501 Electrodynamics Problem Set 6: Princeton UniversityEdgar RamirezAún no hay calificaciones
- Etg 1 02Documento9 páginasEtg 1 02Tapas RoyAún no hay calificaciones
- Ec2305 Transmission Lines & Wave Guides Question BankDocumento6 páginasEc2305 Transmission Lines & Wave Guides Question BankharvishAún no hay calificaciones
- UnifacDocumento3 páginasUnifacapi-294011342Aún no hay calificaciones
- Bk5 Sol C14 EDocumento36 páginasBk5 Sol C14 EMa Ka YiAún no hay calificaciones
- Materials Today Nano: Anuj Kumar, Yun Kuang, Zheng Liang, Xiaoming SunDocumento20 páginasMaterials Today Nano: Anuj Kumar, Yun Kuang, Zheng Liang, Xiaoming SuntahaAún no hay calificaciones
- The Effect of Temperature On The Elasticity of A Rubber BandDocumento11 páginasThe Effect of Temperature On The Elasticity of A Rubber BandThiagarajan BaluAún no hay calificaciones
- Moody Chart Solver, HDocumento3 páginasMoody Chart Solver, HAnonymous LrKeCiUAún no hay calificaciones
- ME 218 - Spring 2018 - Week05 HandoutDocumento7 páginasME 218 - Spring 2018 - Week05 HandoutNitin BhatiAún no hay calificaciones
- IB EXtended Essay-Modeling The Variation in Specific Heat of A 4'-Octyl-4-Biphenyl-Carbonitrile Liquid Crystal Due To Phase TransitionDocumento43 páginasIB EXtended Essay-Modeling The Variation in Specific Heat of A 4'-Octyl-4-Biphenyl-Carbonitrile Liquid Crystal Due To Phase TransitionAndrewAún no hay calificaciones
- Physics Mechanics Help BookletDocumento88 páginasPhysics Mechanics Help Bookletdj7597100% (1)
- Optimizing Flow in Plastic Injection MoldingDocumento9 páginasOptimizing Flow in Plastic Injection MoldingThang NguyenAún no hay calificaciones
- Cau Truc To HopDocumento1258 páginasCau Truc To Hopkhôi trươngAún no hay calificaciones
- Determine Amount of Oxygen in Tank from Pressure and TemperatureDocumento3 páginasDetermine Amount of Oxygen in Tank from Pressure and Temperatureyeng botzAún no hay calificaciones
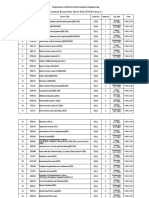
- Terminal Exams Date Sheet-Fall 2020 (Version-1) : Department of Electrical and Computer EngineeringDocumento6 páginasTerminal Exams Date Sheet-Fall 2020 (Version-1) : Department of Electrical and Computer EngineeringMuhammad Zaeem AkmalAún no hay calificaciones
- Semianalytical Productivity Models For Perforated CompletionsDocumento10 páginasSemianalytical Productivity Models For Perforated CompletionsPhước LêAún no hay calificaciones