También podría gustarte
- House Rent Receipt: Receiver's SignatureDocumento1 páginaHouse Rent Receipt: Receiver's SignaturesivaAún no hay calificaciones
- House Rent Receipt: Receiver's SignatureDocumento1 páginaHouse Rent Receipt: Receiver's SignaturesivaAún no hay calificaciones
- House Rent Receipt: Receiver's SignatureDocumento1 páginaHouse Rent Receipt: Receiver's SignaturesivaAún no hay calificaciones
- Mtech SyllabusDocumento44 páginasMtech SyllabusLal ChhuanmawiaAún no hay calificaciones
- House Rent Receipt: Receiver's SignatureDocumento1 páginaHouse Rent Receipt: Receiver's SignaturesivaAún no hay calificaciones
- House Rent Receipt: Receiver's SignatureDocumento1 páginaHouse Rent Receipt: Receiver's SignaturesivaAún no hay calificaciones
- House Rent Receipt: Receiver's SignatureDocumento1 páginaHouse Rent Receipt: Receiver's SignaturesivaAún no hay calificaciones
- House Rent Receipt: Receiver's SignatureDocumento1 páginaHouse Rent Receipt: Receiver's SignaturesivaAún no hay calificaciones
- House Rent Receipt: Receiver's SignatureDocumento1 páginaHouse Rent Receipt: Receiver's SignaturesivaAún no hay calificaciones
- House Rent Receipt: Receiver's SignatureDocumento1 páginaHouse Rent Receipt: Receiver's SignaturesivaAún no hay calificaciones
- House Rent Receipt: Receiver's SignatureDocumento1 páginaHouse Rent Receipt: Receiver's SignaturesivaAún no hay calificaciones
- House Rent Receipt: Receiver's SignatureDocumento1 páginaHouse Rent Receipt: Receiver's SignaturesivaAún no hay calificaciones
- Siemer Technologies: Krishnapantham Port Company LTDDocumento2 páginasSiemer Technologies: Krishnapantham Port Company LTDsivaAún no hay calificaciones
- Maintenance records for mechanical and electrical worksDocumento2 páginasMaintenance records for mechanical and electrical workssivaAún no hay calificaciones
- Flat Return Idler-1 PDFDocumento1 páginaFlat Return Idler-1 PDFsivaAún no hay calificaciones
- TechDocumento24 páginasTechsivaAún no hay calificaciones
- Bought-Out Specification Bearings: P & Ye DivDocumento1 páginaBought-Out Specification Bearings: P & Ye DivsivaAún no hay calificaciones
- Tower-C-T9 R-4 PDFDocumento1 páginaTower-C-T9 R-4 PDFsivaAún no hay calificaciones
- Schedule Gsu KPCLDocumento14 páginasSchedule Gsu KPCLsivaAún no hay calificaciones
- Matrl Status SR, SSDocumento4 páginasMatrl Status SR, SSsivaAún no hay calificaciones
- Matrl Status SR, SSDocumento4 páginasMatrl Status SR, SSsivaAún no hay calificaciones
- Material Receipt List at SiteDocumento14 páginasMaterial Receipt List at SitesivaAún no hay calificaciones
- Painting AnnexureDocumento2 páginasPainting AnnexuresivaAún no hay calificaciones
- MTL - Receipt As On Dt.14.06.14Documento38 páginasMTL - Receipt As On Dt.14.06.14sivaAún no hay calificaciones
- Commissioning of GSU-1 ActivityDocumento8 páginasCommissioning of GSU-1 ActivitysivaAún no hay calificaciones
- TRF Punch List (Star 1)Documento6 páginasTRF Punch List (Star 1)sivaAún no hay calificaciones
- TRF DrawingsDocumento4 páginasTRF DrawingssivaAún no hay calificaciones
- Alignment Inspection Report For Erection of Structural Steel (Gallery & Trestle)Documento1 páginaAlignment Inspection Report For Erection of Structural Steel (Gallery & Trestle)sivaAún no hay calificaciones
- CR-4 Bom 8816Documento39 páginasCR-4 Bom 8816sivaAún no hay calificaciones
- Siemer Technologies: Krishnapantham Port Company LTDDocumento2 páginasSiemer Technologies: Krishnapantham Port Company LTDsivaAún no hay calificaciones
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (890)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (587)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (73)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (265)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (119)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2099)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- LS TTL DataDocumento274 páginasLS TTL Datajfk777Aún no hay calificaciones
- Antennas 101Documento1 páginaAntennas 101vijaya36fAún no hay calificaciones
- DrawingsDocumento58 páginasDrawingssanjeetkrs63% (8)
- Voltage Regulator: Semiconductor Technical DataDocumento9 páginasVoltage Regulator: Semiconductor Technical DataEnriqueAún no hay calificaciones
- Digital Fiber Sensor Amplifier FX-301 (P) : WarningDocumento4 páginasDigital Fiber Sensor Amplifier FX-301 (P) : WarningGaurav KAún no hay calificaciones
- Dual High Slew Rate, Low Noise Operational Amplifier: BA15532 / BA15532F / BA15532NDocumento4 páginasDual High Slew Rate, Low Noise Operational Amplifier: BA15532 / BA15532F / BA15532NAlexander Jimenez MejiaAún no hay calificaciones
- Two-Port Network ParametersDocumento19 páginasTwo-Port Network ParametersbadreeborhanAún no hay calificaciones
- 350W Single Output DC-DC Converter: SeriesDocumento3 páginas350W Single Output DC-DC Converter: Seriesninjai_thelittleninjaAún no hay calificaciones
- 1 FT7 Servo Motor BrochureDocumento324 páginas1 FT7 Servo Motor BrochureAlondra ArellanoAún no hay calificaciones
- Appendix Bizhub Pro 920Documento28 páginasAppendix Bizhub Pro 920katjho100% (1)
- Leshan Radio Company EGP10A thru EGP10M RectifiersDocumento3 páginasLeshan Radio Company EGP10A thru EGP10M RectifiersCarlos AntonioAún no hay calificaciones
- Module 7Documento17 páginasModule 7jimmyboyjr50% (2)
- Fuente DC 440/24vdcDocumento3 páginasFuente DC 440/24vdcINGWIRBOAún no hay calificaciones
- Ysly Oz Ysly JZ EngDocumento3 páginasYsly Oz Ysly JZ EngTrajkoAún no hay calificaciones
- Substation Equipment MaintenanceDocumento15 páginasSubstation Equipment MaintenanceDr. R. SharmaAún no hay calificaciones
- Electrical Engineering Portal Com Electrical Thumb Rules You Must Follow Part 4Documento11 páginasElectrical Engineering Portal Com Electrical Thumb Rules You Must Follow Part 4m khAún no hay calificaciones
- Nikola Tesla Tells of New Radio Theories - Disputes Hertz WavesDocumento2 páginasNikola Tesla Tells of New Radio Theories - Disputes Hertz WavesTHE NIKOLA TESLA INSTITUTEAún no hay calificaciones
- Albany 03 05 08 - RefDocumento2 páginasAlbany 03 05 08 - RefJulio VergaraAún no hay calificaciones
- Gruppe Spot II LED FloodlightDocumento2 páginasGruppe Spot II LED FloodlightManju BargaveeAún no hay calificaciones
- PhysRevB 58 4384 PDFDocumento11 páginasPhysRevB 58 4384 PDFचन्द्रभाल सिंहAún no hay calificaciones
- S000e Pakscan Systems GlossyDocumento16 páginasS000e Pakscan Systems Glossyhizbi7Aún no hay calificaciones
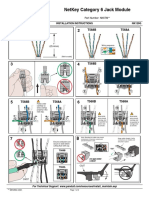
- Install Instructions NetKey Category 6 Jack Module - TERMINACION CON LLAVEDocumento2 páginasInstall Instructions NetKey Category 6 Jack Module - TERMINACION CON LLAVEMonte PlataAún no hay calificaciones
- Lista Almacen Proway 2022 - Imp. JulDocumento5 páginasLista Almacen Proway 2022 - Imp. JulFermin Tafur LliuyaAún no hay calificaciones
- LED Uniform Illumination Using Double Linear Fresnel Lenses For Energy SavingDocumento15 páginasLED Uniform Illumination Using Double Linear Fresnel Lenses For Energy SavingAlexOO7Aún no hay calificaciones
- Product datasheet for Eveready 4R25 6V batteryDocumento2 páginasProduct datasheet for Eveready 4R25 6V batteryMarcelo DanieliAún no hay calificaciones
- J1939 15 PDFDocumento19 páginasJ1939 15 PDFMauro100% (3)
- Guide of Methods For Determining The Condition of Stator Winding Insulation and Their Effectiveness in Large MotorsDocumento36 páginasGuide of Methods For Determining The Condition of Stator Winding Insulation and Their Effectiveness in Large MotorsNilav KumarAún no hay calificaciones
- F Floodlights: Standard S Specification FeaturesDocumento2 páginasF Floodlights: Standard S Specification Featuresmathan_aeAún no hay calificaciones
- Varitrans® P 27000-S007 Universal Isolators: Ta-251.103-Kne01 20120802 84762Documento12 páginasVaritrans® P 27000-S007 Universal Isolators: Ta-251.103-Kne01 20120802 84762Alan Barros SallesAún no hay calificaciones