También podría gustarte
- 3 CriptografiaDocumento42 páginas3 Criptografiacarlos7624Aún no hay calificaciones
- Tarjeta MadreDocumento14 páginasTarjeta Madreapi-405738974Aún no hay calificaciones
- Conversión de Afnd A AfdDocumento12 páginasConversión de Afnd A AfdMargaritaAún no hay calificaciones
- Traducción de Datasheet Atmega16Documento3 páginasTraducción de Datasheet Atmega16Frank Cabrera Salazar100% (1)
- Administracion de Redes - DNSDocumento8 páginasAdministracion de Redes - DNSYohany Enrique ORTIZ ACOSTAAún no hay calificaciones
- Resumen - Capitulo 6Documento7 páginasResumen - Capitulo 6Øsïírïís RøjåsAún no hay calificaciones
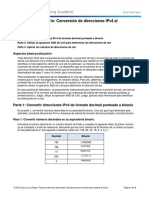
- 7.1.2.9 Lab - Converting IPv4 Addresses To BinaryDocumento4 páginas7.1.2.9 Lab - Converting IPv4 Addresses To BinaryAndres Serrano ArrietaAún no hay calificaciones
- ReplicacionDocumento14 páginasReplicacionLuis MenesesAún no hay calificaciones
- Zorin OsDocumento5 páginasZorin OsBlas Benites MontenegroAún no hay calificaciones
- 3.2.3.4 Lab - Researching Networking Standards3Documento3 páginas3.2.3.4 Lab - Researching Networking Standards3George EcheverriaAún no hay calificaciones
- Actividad Final Unidad 4 y 5Documento6 páginasActividad Final Unidad 4 y 5Zamuel CastilloAún no hay calificaciones
- Informe de Laboratorio n2Documento5 páginasInforme de Laboratorio n2Cesar MachadoAún no hay calificaciones
- Practica SubnettingDocumento4 páginasPractica Subnettingjholianis2014Aún no hay calificaciones
- Libro Compiladores ResumenDocumento26 páginasLibro Compiladores Resumenrobert martinezAún no hay calificaciones
- Sistemas operativos: definición, funciones y tiposDocumento3 páginasSistemas operativos: definición, funciones y tiposJuan Jose Morales Carrillo100% (2)
- Investigacion U3 MovilesDocumento10 páginasInvestigacion U3 MovilesRick Ramon AAún no hay calificaciones
- Principios Tabla de EnrutamientoDocumento9 páginasPrincipios Tabla de EnrutamientoХристианин СотняAún no hay calificaciones
- 7.1.4. Desarrollar Prácticas para Realizar La Conexión A La Base de Datos Desde El Lenguaje Huésped.Documento3 páginas7.1.4. Desarrollar Prácticas para Realizar La Conexión A La Base de Datos Desde El Lenguaje Huésped.Lissie Dianela Chuc UicabAún no hay calificaciones
- Historia de la red: Pedro inventa Internet enDocumento1 páginaHistoria de la red: Pedro inventa Internet enparabajardejorgeAún no hay calificaciones
- Cap4. Redes Conmutadas CCNA2Documento18 páginasCap4. Redes Conmutadas CCNA2Letty PC0% (1)
- Voip 14Documento36 páginasVoip 14Eduardo RanieriAún no hay calificaciones
- Cuadro Comparativo 1Documento3 páginasCuadro Comparativo 1Brian RcAún no hay calificaciones
- Ej Lenguaje Java 12Documento2 páginasEj Lenguaje Java 12jaba2820Aún no hay calificaciones
- Examen Alberto Saucedo BarraganDocumento2 páginasExamen Alberto Saucedo BarraganJuan Manuel RamirezAún no hay calificaciones
- Laboratorio 5.5.1 y 5.5.2Documento19 páginasLaboratorio 5.5.1 y 5.5.2rosainfernalAún no hay calificaciones
- Patrones de Arquitectura, MVVM y MVPDocumento17 páginasPatrones de Arquitectura, MVVM y MVPGiancarloAndréRomeroMonroyAún no hay calificaciones
- Diseño de Una Red WanDocumento8 páginasDiseño de Una Red WanSYLVIAAún no hay calificaciones
- Vlans y Qos - Roberto Flores AyquiDocumento41 páginasVlans y Qos - Roberto Flores AyquiRob Stark WolfAún no hay calificaciones
- UNAMAD Redes InalambricasDocumento7 páginasUNAMAD Redes InalambricasAngel Herrera SaraAún no hay calificaciones
- Relleno de PoligonosDocumento8 páginasRelleno de PoligonosRicardo de la ParraAún no hay calificaciones
- Proyecto 802 de La IeeeDocumento10 páginasProyecto 802 de La IeeeMario CastroAún no hay calificaciones
- Características SQL, PostgreSQL, MySQL, OracleDocumento3 páginasCaracterísticas SQL, PostgreSQL, MySQL, OracleRodrigo AguillonAún no hay calificaciones
- Preguntas Sobre El Levantamiento de SitioDocumento3 páginasPreguntas Sobre El Levantamiento de SitioxshadayxAún no hay calificaciones
- Historia Del Modelo OSIDocumento3 páginasHistoria Del Modelo OSITivisay RubianoAún no hay calificaciones
- Qué Es VTP y Sus Comandos de ConfiguraciónDocumento8 páginasQué Es VTP y Sus Comandos de ConfiguraciónMARQUEZGUTIERREZJOSEAún no hay calificaciones
- Practico de SISTEMAS NUMÉRICOSDocumento6 páginasPractico de SISTEMAS NUMÉRICOSRodrigoAún no hay calificaciones
- Práctica - 2 - Configuración - Básica - de - Enrutadores UTCJDocumento5 páginasPráctica - 2 - Configuración - Básica - de - Enrutadores UTCJYadira GraAún no hay calificaciones
- Las Métricas de Complejidad de HalsteadDocumento3 páginasLas Métricas de Complejidad de HalsteadJavier TrujilloAún no hay calificaciones
- Nfs y CifsDocumento2 páginasNfs y Cifsstarkk0% (1)
- NFSDocumento10 páginasNFSantonAún no hay calificaciones
- REDES Y COMUNICACIONES Actividad 2Documento5 páginasREDES Y COMUNICACIONES Actividad 2oscar arangoAún no hay calificaciones
- VLSM y CIDR (Características, Implementación Y/o Configuración)Documento15 páginasVLSM y CIDR (Características, Implementación Y/o Configuración)Frank Reynaldo80% (5)
- PRY01 - Angel NicolasDocumento5 páginasPRY01 - Angel NicolasAdriana CornelioAún no hay calificaciones
- Cuadro ComparativoDocumento3 páginasCuadro ComparativoAnita 16Aún no hay calificaciones
- Estructura Interna de Las Manejadores de Base de DatosDocumento37 páginasEstructura Interna de Las Manejadores de Base de DatosMauricio MoralesAún no hay calificaciones
- Proyecto Programacion: Barbero DormilonDocumento6 páginasProyecto Programacion: Barbero DormilonArihana Silva Boudewyn0% (1)
- Escalamiento de Redes: La Necesidad de Escalamiento de RedesDocumento11 páginasEscalamiento de Redes: La Necesidad de Escalamiento de RedesOscarAún no hay calificaciones
- Sistemas Operativo para Dispositivos Moviles LigerosDocumento8 páginasSistemas Operativo para Dispositivos Moviles LigerosLucre Castillo LorenzoAún no hay calificaciones
- Como Configurar Un Tunel GREDocumento3 páginasComo Configurar Un Tunel GREdarkinternautaAún no hay calificaciones
- Requisitos de Instalacion de SGBDDocumento4 páginasRequisitos de Instalacion de SGBDdavidAún no hay calificaciones
- Analisi LexicoDocumento25 páginasAnalisi LexicoBrandon PascAún no hay calificaciones
- Unidad 3 Tecnologias Wan - CompressDocumento8 páginasUnidad 3 Tecnologias Wan - CompressCarloz MontoyaAún no hay calificaciones
- Aplicaciones lenguaje programación híbridaDocumento6 páginasAplicaciones lenguaje programación híbridaJoshua Velasquez Velasquez100% (1)
- Sistema de AutentificaciónDocumento6 páginasSistema de Autentificaciónclaudio72188Aún no hay calificaciones
- Herramientas de Flujo de DatosDocumento15 páginasHerramientas de Flujo de DatosChepe Terron100% (1)
- Práctica 1 Protocolo de Enrutamiento RIPDocumento6 páginasPráctica 1 Protocolo de Enrutamiento RIPJose MuñozAún no hay calificaciones
- Administracion y Configuracion de RedesDocumento28 páginasAdministracion y Configuracion de RedesOmar VlogsAún no hay calificaciones
- Paso A PasoDocumento6 páginasPaso A PasoDana Nenis ZaratAún no hay calificaciones
- 4.7 Servicios de La Gestión de MemoriaDocumento4 páginas4.7 Servicios de La Gestión de MemoriaMiguel Quispe CruzadaAún no hay calificaciones
- Proyecto Traductor Morse Ontiveros AlbertoDocumento17 páginasProyecto Traductor Morse Ontiveros AlbertoAlberto OntiverosAún no hay calificaciones
- Controladores ClasicosDocumento21 páginasControladores ClasicosAlberto OntiverosAún no hay calificaciones
- Licitación mantenimiento equipos SNDIFDocumento861 páginasLicitación mantenimiento equipos SNDIFAlberto OntiverosAún no hay calificaciones
- Tipos de LiderDocumento2 páginasTipos de LiderAlberto OntiverosAún no hay calificaciones
- Metro Por Ultrasonidos Con LCDDocumento12 páginasMetro Por Ultrasonidos Con LCDAlex CañarAún no hay calificaciones
- Alternativas para El Ruido en EscuelasDocumento16 páginasAlternativas para El Ruido en EscuelaslavargasAún no hay calificaciones
- Aislamiento Acustico en SalasDocumento208 páginasAislamiento Acustico en SalasAlberto Ontiveros100% (1)
- 3-2 - El EspectrogramaDocumento3 páginas3-2 - El EspectrogramaEdgar TristánAún no hay calificaciones
- Proyecto Traductor Morse Ontiveros AlbertoDocumento17 páginasProyecto Traductor Morse Ontiveros AlbertoAlberto OntiverosAún no hay calificaciones
- Proyecto Tr60 Final 6cv6Documento13 páginasProyecto Tr60 Final 6cv6Alberto OntiverosAún no hay calificaciones
- NoticiasDocumento2 páginasNoticiasAlberto OntiverosAún no hay calificaciones
- Info Curso Cubase y Otros Trimestre Febrero 2017Documento3 páginasInfo Curso Cubase y Otros Trimestre Febrero 2017Alberto OntiverosAún no hay calificaciones
- Controladores ClasicosDocumento21 páginasControladores ClasicosAlberto OntiverosAún no hay calificaciones
- PoemasDocumento4 páginasPoemasAlberto OntiverosAún no hay calificaciones
- Estudio de GrabacionDocumento2 páginasEstudio de GrabacionAlberto OntiverosAún no hay calificaciones
- IPN-ESIME-Reflexión y refracción-leyes de SnellDocumento7 páginasIPN-ESIME-Reflexión y refracción-leyes de SnellAlberto OntiverosAún no hay calificaciones
- EnconadoDocumento7 páginasEnconadoAlberto OntiverosAún no hay calificaciones
- Analisis NumericoDocumento5 páginasAnalisis NumericoAlberto OntiverosAún no hay calificaciones
- Diccionario Básico Español-JaponésDocumento17 páginasDiccionario Básico Español-JaponésJavier SolacheAún no hay calificaciones
- Teoría Del Comercio InternacionalDocumento11 páginasTeoría Del Comercio InternacionalAlberto OntiverosAún no hay calificaciones
- Tabla VaciaDocumento1 páginaTabla VaciaAlberto OntiverosAún no hay calificaciones
- Nociones Basicas Sobre El Idioma Japones - Suplemento (Juan Manuel Cardona)Documento28 páginasNociones Basicas Sobre El Idioma Japones - Suplemento (Juan Manuel Cardona)Jorge OjedaAún no hay calificaciones
- Guia ETS Teoremas 2012Documento9 páginasGuia ETS Teoremas 2012barr1Aún no hay calificaciones
- Los 148 Verbos Irregulares Del InglésDocumento5 páginasLos 148 Verbos Irregulares Del InglésKaren Gabiru He MAún no hay calificaciones
- Formulario de Precálculo (Matemáticas-KALASHNIKOV)Documento21 páginasFormulario de Precálculo (Matemáticas-KALASHNIKOV)Andrés Alfonso Hdez100% (1)
- Gravitacion UniversalDocumento7 páginasGravitacion UniversalAlberto OntiverosAún no hay calificaciones
- Medida RCDocumento6 páginasMedida RCRodrigo SagongAún no hay calificaciones
- TFG Alberto Jimenez de La PenaDocumento184 páginasTFG Alberto Jimenez de La Penadaniel alexander gomez pabonAún no hay calificaciones
- Laboratorio Nro.04Documento4 páginasLaboratorio Nro.04Johan MayaAún no hay calificaciones
- CanBus CanOpenDocumento38 páginasCanBus CanOpenLuis Alonso Garcia TachoAún no hay calificaciones
- LabMaqElectrEsta92G-Ensayo de Cortocircuito de TransformadoresDocumento9 páginasLabMaqElectrEsta92G-Ensayo de Cortocircuito de TransformadoresDIAZ CUBA ROGER JEANPOOLAún no hay calificaciones
- Microcontroladores Familia Msp430Documento35 páginasMicrocontroladores Familia Msp430Uvaldo RamirezAún no hay calificaciones
- RegletaDocumento16 páginasRegletaGustavo Cruz SandovalAún no hay calificaciones
- Sobrecarga ElectricaDocumento2 páginasSobrecarga ElectricaQuijote de la ManchaAún no hay calificaciones
- Aisladores para Alta TensionDocumento34 páginasAisladores para Alta Tensiondarwin100% (1)
- Circuitos Logicos SecuencialesDocumento17 páginasCircuitos Logicos SecuencialesalfredotoxquiAún no hay calificaciones
- CLC (Detector de Codigo BCD Erroneo)Documento6 páginasCLC (Detector de Codigo BCD Erroneo)Josué CabreraAún no hay calificaciones
- Laboratorio temperatura Arduino ProteusDocumento9 páginasLaboratorio temperatura Arduino ProteusKevin TamayoAún no hay calificaciones
- Manual de Instalación de Detector de Humos Por Aspiración y CONCEPTOSDocumento60 páginasManual de Instalación de Detector de Humos Por Aspiración y CONCEPTOSFRANKAún no hay calificaciones
- Check-List-Torno CNCDocumento2 páginasCheck-List-Torno CNCYarces Tovar Celaya100% (1)
- Loos CalderasDocumento20 páginasLoos CalderasAgustin MarozziAún no hay calificaciones
- ANTENADocumento17 páginasANTENACarolina Rodriguez SolisAún no hay calificaciones
- Grupo 13 - Sicodi Ii Tarea 3Documento8 páginasGrupo 13 - Sicodi Ii Tarea 3darwin muñoz tafurAún no hay calificaciones
- PLC ControladoresDocumento53 páginasPLC ControladoresFranz G. Callisaya PacoAún no hay calificaciones
- Clase1 AdquisicionDocumento18 páginasClase1 AdquisicionandersonAún no hay calificaciones
- Tarea 1.1 Llumiquinga LeninDocumento12 páginasTarea 1.1 Llumiquinga LeninLLUMIQUINGA LENIN100% (1)
- Laboratorio Final N 3 Tele 3Documento2 páginasLaboratorio Final N 3 Tele 3Ivan CcleAún no hay calificaciones
- ACTIVIDADES COMPLEMENTARIAS Unidad 3. Normatividad e Instalaciones ResidencialesDocumento5 páginasACTIVIDADES COMPLEMENTARIAS Unidad 3. Normatividad e Instalaciones ResidencialesManuel Miranda AAún no hay calificaciones
- AFEX - Control Unit (Spanish)Documento2 páginasAFEX - Control Unit (Spanish)JOSÉ MARTIN MANTILLA HERRERAAún no hay calificaciones
- Propuesta Didactica de Una Maqueta de Una Linea de TransmisionDocumento15 páginasPropuesta Didactica de Una Maqueta de Una Linea de TransmisionPedro TellezAún no hay calificaciones
- MIO Conmutacion-DigitalDocumento21 páginasMIO Conmutacion-DigitalMiguel Angel Q PAún no hay calificaciones
- Informe Final 9 - Electronicos 2Documento4 páginasInforme Final 9 - Electronicos 2Natalia PilarAún no hay calificaciones
- Universidad Mayor de San Simon Facultad de Ciencias Y Tecnologia Departamento de ElectricaDocumento18 páginasUniversidad Mayor de San Simon Facultad de Ciencias Y Tecnologia Departamento de ElectricaJavier Mamani RamosAún no hay calificaciones
- PRQ-219 SalchipaperaDocumento44 páginasPRQ-219 SalchipaperaMorales Soto Andrea PamelaAún no hay calificaciones
- Computadoras HíbridasDocumento3 páginasComputadoras HíbridasEdwin RaxtunAún no hay calificaciones
- Los mecanismos de transferencia de calor en procesos industriales y del hogarDocumento5 páginasLos mecanismos de transferencia de calor en procesos industriales y del hogarCristian Nuñez GalleguillosAún no hay calificaciones