También podría gustarte
- Campamento Júpiter ClasificadoDocumento131 páginasCampamento Júpiter ClasificadoMaria Claudia Villazón Ibáñez67% (3)
- No Game No Life Volumen 04Documento207 páginasNo Game No Life Volumen 04Oswaldo CarabañoAún no hay calificaciones
- No Game No Life Volumen 9 PDFDocumento226 páginasNo Game No Life Volumen 9 PDFsantivtk0% (1)
- 10 PirometrosDocumento15 páginas10 PirometrosDeyvis Alexis Sierra RiosAún no hay calificaciones
- Autorefractometro Manual A5Documento29 páginasAutorefractometro Manual A5AlejandraAún no hay calificaciones
- No Game No Life 6 (ES)Documento288 páginasNo Game No Life 6 (ES)André Fischer Carmona100% (1)
- Dinamica Sistemas de PotenciaDocumento15 páginasDinamica Sistemas de PotenciaLuz Maria ValdezAún no hay calificaciones
- Analogias o Equivalencias Entre Sistemas Mecanicos y Eléctricos FinalDocumento18 páginasAnalogias o Equivalencias Entre Sistemas Mecanicos y Eléctricos FinalPablo Andres VintimillaAún no hay calificaciones
- No Game No Life Volumen 5 PDFDocumento351 páginasNo Game No Life Volumen 5 PDFGabriel Palomares HumanesAún no hay calificaciones
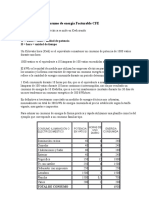
- Calculo consumo energía CFEDocumento2 páginasCalculo consumo energía CFE10rodriguezAún no hay calificaciones
- (KKLR) No Game No Life 01Documento206 páginas(KKLR) No Game No Life 01SergioGimenoVives100% (2)
- No Game, No Life. Vol 8Documento224 páginasNo Game, No Life. Vol 8Angel Cares Marin75% (4)
- H.G. Wells - La Puerta en El MuroDocumento17 páginasH.G. Wells - La Puerta en El MuroCésarAún no hay calificaciones
- Tu Silencia, Mi DolorDocumento1 páginaTu Silencia, Mi DolorZanti Lobon QuelopanaAún no hay calificaciones
- Vals de MedianocheDocumento1 páginaVals de MedianocheZanti Lobon QuelopanaAún no hay calificaciones
- Isekai Wa Smartphone To Tomo Ni - Volumen 16 (Light Novel)Documento242 páginasIsekai Wa Smartphone To Tomo Ni - Volumen 16 (Light Novel)Jahir PimientaAún no hay calificaciones
- Escena Eliminada El Ladrón Del Rayo - Rick RiordanDocumento3 páginasEscena Eliminada El Ladrón Del Rayo - Rick RiordanZanti Lobon QuelopanaAún no hay calificaciones
- Escena Eliminada de El Último Héroe Del Olimpo - Rick RiordanDocumento2 páginasEscena Eliminada de El Último Héroe Del Olimpo - Rick RiordanZanti Lobon QuelopanaAún no hay calificaciones
- (KKLR) No Game No Life 02Documento221 páginas(KKLR) No Game No Life 02SergioGimenoVivesAún no hay calificaciones
- No Game No Life Volumen 7Documento283 páginasNo Game No Life Volumen 7Dany J. Marroquin0% (1)
- Isekai Wa Smartphone To Tomo Ni - Volumen 20 (Light Novel)Documento206 páginasIsekai Wa Smartphone To Tomo Ni - Volumen 20 (Light Novel)Jahir PimientaAún no hay calificaciones
- (KKLR) No Game No Life 03Documento231 páginas(KKLR) No Game No Life 03Magquivert Kyokasuiguetsu Sama100% (2)
- In Another World With My Smartphone - Volumen 19 (Light Novel)Documento178 páginasIn Another World With My Smartphone - Volumen 19 (Light Novel)cesarAún no hay calificaciones
- In Another World With My Smartphone World ProjectDocumento214 páginasIn Another World With My Smartphone World ProjectJonathan Martinez CortezAún no hay calificaciones
- 397af3e7-56dd-45fc-b1ed-be5304bf7b9bDocumento205 páginas397af3e7-56dd-45fc-b1ed-be5304bf7b9bjheremy garciaAún no hay calificaciones
- Isekai Wa Smarphon 22Documento214 páginasIsekai Wa Smarphon 22Xose CosmeAún no hay calificaciones
- 21 in Another World With My SmartphoneDocumento215 páginas21 in Another World With My SmartphoneZanti Lobon QuelopanaAún no hay calificaciones
- Isekai Wa Smartphone To Tomo Ni - Volumen 17 (Light Novel)Documento249 páginasIsekai Wa Smartphone To Tomo Ni - Volumen 17 (Light Novel)Jahir PimientaAún no hay calificaciones
- f99dfa33-afa1-4d71-abdd-0aba36c8873fDocumento200 páginasf99dfa33-afa1-4d71-abdd-0aba36c8873fJonathan Martinez CortezAún no hay calificaciones
- In Another World With My Smartphone - Volumen 11 (Light Novel) PremiumDocumento204 páginasIn Another World With My Smartphone - Volumen 11 (Light Novel) PremiumHuaman Rojas YerocAún no hay calificaciones
- In Another World With My Smartphone - Volumen 13 (Light Novel) PremiumDocumento199 páginasIn Another World With My Smartphone - Volumen 13 (Light Novel) PremiumJavier E. ZunoAún no hay calificaciones
- In Another World With My Smartphone World ProjectDocumento217 páginasIn Another World With My Smartphone World ProjectJuan Carlos SotoAún no hay calificaciones
- Isekai Wa Smartphone To Tomo Ni - Volumen 10 (Light Novel)Documento195 páginasIsekai Wa Smartphone To Tomo Ni - Volumen 10 (Light Novel)Jahir Pimienta100% (1)
- Isekai Wa Smartphone To Tomo Ni - Volumen 12 (Light Novel)Documento200 páginasIsekai Wa Smartphone To Tomo Ni - Volumen 12 (Light Novel)Jahir PimientaAún no hay calificaciones
- 4 in Another World With My SmartphoneDocumento193 páginas4 in Another World With My SmartphoneZanti Lobon QuelopanaAún no hay calificaciones
- Accionamiento RodilloDocumento2 páginasAccionamiento Rodillofelipe alfonso guarnizo naranjoAún no hay calificaciones
- Practica 04 CIRCUITOS ELECTRICOS IIDocumento5 páginasPractica 04 CIRCUITOS ELECTRICOS IIBrayan Coyuri LopezAún no hay calificaciones
- Principios maquinas eléctricasDocumento104 páginasPrincipios maquinas eléctricasAlvaro Michel OrozcoAún no hay calificaciones
- Balanza Lexus Xub SsDocumento6 páginasBalanza Lexus Xub Ssjair varonAún no hay calificaciones
- Conceptos básicos de procesos, archivos, sistemas de archivos, compiladores, lenguajes de máquina, ensambladores y máquinas virtualesDocumento3 páginasConceptos básicos de procesos, archivos, sistemas de archivos, compiladores, lenguajes de máquina, ensambladores y máquinas virtualesRuben ZM100% (1)
- Signalink EspaÑolDocumento16 páginasSignalink EspaÑolDelfin Lopez100% (1)
- Filtrado MacDocumento3 páginasFiltrado MacViridiana GarciaAún no hay calificaciones
- CA Abb Vcontact-Vsc (Es)Documento20 páginasCA Abb Vcontact-Vsc (Es)Wiliam CopacatiAún no hay calificaciones
- Rectificador - 48V 2700 WDocumento4 páginasRectificador - 48V 2700 WmickycachoperroAún no hay calificaciones
- Artículo: Evolución de La Telefonía Móvil en EcuadorDocumento3 páginasArtículo: Evolución de La Telefonía Móvil en Ecuadordhguevara0% (1)
- Caratula de DinamicaDocumento43 páginasCaratula de DinamicaAnonymous nv7jXZRwAún no hay calificaciones
- Ensayos de vacío y cortocircuito en transformador monofásicoDocumento16 páginasEnsayos de vacío y cortocircuito en transformador monofásicoAndrew AntoAnAún no hay calificaciones
- Multi Metro Digital Hy 4300 - TraducidoDocumento8 páginasMulti Metro Digital Hy 4300 - Traducidohadryana-montoya-77350% (1)
- Plan de Negocios CybercaféDocumento5 páginasPlan de Negocios CybercaféErikLudewigAún no hay calificaciones
- Lista de Chequeo MantenimientoDocumento3 páginasLista de Chequeo MantenimientoAyBorren EseMemeAún no hay calificaciones
- Mci Flexalighting Novedades 2019Documento100 páginasMci Flexalighting Novedades 2019VEMATELAún no hay calificaciones
- Oib CCD Dyna-6 4373151m1ed1 EsDocumento150 páginasOib CCD Dyna-6 4373151m1ed1 EsRojasDura.Aún no hay calificaciones
- Práctica Telecomunicaciones 1Documento3 páginasPráctica Telecomunicaciones 1Marco UscamaytaAún no hay calificaciones
- 04 OLAS Cat General Niessen 2008Documento28 páginas04 OLAS Cat General Niessen 2008José Antonio De Dios RodríguezAún no hay calificaciones
- Central Fotovoltaica Rubi Ing PiconDocumento3 páginasCentral Fotovoltaica Rubi Ing PicondardozAún no hay calificaciones
- Woo Tablet Pad 841wDocumento1 páginaWoo Tablet Pad 841wpeillaAún no hay calificaciones
- Altistar 22Documento89 páginasAltistar 22Danilo Felipe Cortes BarriaAún no hay calificaciones
- Conceptos de TelefoniaDocumento10 páginasConceptos de Telefoniarjga2006Aún no hay calificaciones
- Direccionamiento en Modo RealDocumento4 páginasDireccionamiento en Modo RealJulio QuintanaAún no hay calificaciones
- Características hardware y software de la computadoraDocumento3 páginasCaracterísticas hardware y software de la computadoraByron PucAún no hay calificaciones