También podría gustarte
- Lecture 27 Intro Slipline Field TheoryDocumento14 páginasLecture 27 Intro Slipline Field TheoryprasannaAún no hay calificaciones
- 2 - Plane Elasticity PDFDocumento21 páginas2 - Plane Elasticity PDFDheeraj KulkarniAún no hay calificaciones
- 2-D Formulation: Plane Theory of ElasticityDocumento17 páginas2-D Formulation: Plane Theory of ElasticityDobromir DinevAún no hay calificaciones
- Plastic ElasticityDocumento23 páginasPlastic ElasticityBiggsAún no hay calificaciones
- ∇ σ + σ = − − ν ∂X ∂x + ∂Y ∂y ∇ σ + σ = 0.: xx yyDocumento7 páginas∇ σ + σ = − − ν ∂X ∂x + ∂Y ∂y ∇ σ + σ = 0.: xx yyAsheeshSharmaAún no hay calificaciones
- 7 Deflection PDFDocumento53 páginas7 Deflection PDFKaaviyan thirunyanamAún no hay calificaciones
- ME 6230: Theory of PlatesDocumento7 páginasME 6230: Theory of PlatesTousif MahmoodAún no hay calificaciones
- Tensão Virtual de Von Mises PDFDocumento10 páginasTensão Virtual de Von Mises PDFAlexandreAún no hay calificaciones
- 2D Problems of ElasticityDocumento14 páginas2D Problems of ElasticityRishan Joshua DsilvaAún no hay calificaciones
- Chap. 6 Boundary Value Problems in Linear Elasticity: U F U U U F U U UDocumento6 páginasChap. 6 Boundary Value Problems in Linear Elasticity: U F U U U F U U USAYEEAún no hay calificaciones
- 7 - Transformation of Stress and StrainDocumento22 páginas7 - Transformation of Stress and StrainMehmet CiglaAún no hay calificaciones
- Summary of The Plate Equations: D W P X, yDocumento4 páginasSummary of The Plate Equations: D W P X, yAndrés MercadoAún no hay calificaciones
- Lecture - 08Documento17 páginasLecture - 08Taseen RahmanAún no hay calificaciones
- Ch3slides Multiple Linear RegressionDocumento61 páginasCh3slides Multiple Linear RegressionDaniel AnguloAún no hay calificaciones
- 1: Thickness: y y X XDocumento7 páginas1: Thickness: y y X XSAYEEAún no hay calificaciones
- Ch7 Transformation StressDocumento34 páginasCh7 Transformation StressDoğukan KurtuluşAún no hay calificaciones
- Stress-Strain Relationship For A Newtonian Fluid: Ij I JDocumento3 páginasStress-Strain Relationship For A Newtonian Fluid: Ij I JMuhammad AamirAún no hay calificaciones
- Material Laws Relating Stress and Strain: AboveDocumento3 páginasMaterial Laws Relating Stress and Strain: AboveRashAún no hay calificaciones
- Airy Stress FunctionDocumento7 páginasAiry Stress FunctionluizgustavoapAún no hay calificaciones
- Plane and Principal Stress - 2Documento32 páginasPlane and Principal Stress - 2adnankhan1988Aún no hay calificaciones
- Full Elementary Aerodynamics Course by MITDocumento158 páginasFull Elementary Aerodynamics Course by MIT34plt34Aún no hay calificaciones
- Mechanic of Solids: Stress and StrainDocumento28 páginasMechanic of Solids: Stress and StrainLuis VarelaAún no hay calificaciones
- Separation of Variables - Two Examples - Laplace's Equation in Polar CoordinatesDocumento42 páginasSeparation of Variables - Two Examples - Laplace's Equation in Polar CoordinatesunistarAún no hay calificaciones
- Lecture 10Documento8 páginasLecture 10Beauponte Pouky MezonlinAún no hay calificaciones
- EN380 Naval Materials Science and Engineering Course Notes, U.S. Naval AcademyDocumento7 páginasEN380 Naval Materials Science and Engineering Course Notes, U.S. Naval Academysrinivas pavan kumar AAún no hay calificaciones
- Coordination Transformations For Strain & Stress RatesDocumento4 páginasCoordination Transformations For Strain & Stress RatesJey SinghAún no hay calificaciones
- Conducting MediumDocumento4 páginasConducting MediumAbhinandan KhajuriaAún no hay calificaciones
- Livro Hibbeler - 7 Ed Resistencia Materiais (Soluções) - 4 PDFDocumento50 páginasLivro Hibbeler - 7 Ed Resistencia Materiais (Soluções) - 4 PDFIzabel Cristina100% (1)
- Chapter 5 Design of Unstiffened PlateDocumento13 páginasChapter 5 Design of Unstiffened PlateAhmedTahaAún no hay calificaciones
- OnsagerDocumento11 páginasOnsagerNomentsuAún no hay calificaciones
- Deflection and Buckling of LaminatesDocumento33 páginasDeflection and Buckling of LaminatesfayuangAún no hay calificaciones
- Advanced Mechanics of Solids (MIN 552)Documento12 páginasAdvanced Mechanics of Solids (MIN 552)Satya Sundar SahooAún no hay calificaciones
- ME223 - Assignment 9 SolutionsDocumento5 páginasME223 - Assignment 9 SolutionsShivang100% (1)
- U U U X X X U U V W V X X y Z: Viscous Flow: Stress Strain RelationshipDocumento2 páginasU U U X X X U U V W V X X y Z: Viscous Flow: Stress Strain Relationshipnanduslns07Aún no hay calificaciones
- Model 5 Non-Newtonian Flow in Ducts Mathematical Aspect: Numerical Solution of Boundary-Value Problems Flow in DuctsDocumento30 páginasModel 5 Non-Newtonian Flow in Ducts Mathematical Aspect: Numerical Solution of Boundary-Value Problems Flow in DuctsEd Gar YundaAún no hay calificaciones
- Partial Differential Equations - WavesDocumento27 páginasPartial Differential Equations - WavesbdsisiraAún no hay calificaciones
- Patiability EquationsDocumento2 páginasPatiability EquationsAham BrahmasmiAún no hay calificaciones
- Principal StressesDocumento15 páginasPrincipal StressesTibebu MerideAún no hay calificaciones
- Fea Chapter5Documento100 páginasFea Chapter5halil yıldırımAún no hay calificaciones
- Introduction To Engineering AnalysisDocumento8 páginasIntroduction To Engineering AnalysisSuprioAún no hay calificaciones
- Flex Ure NotesDocumento19 páginasFlex Ure Notesaniket patelAún no hay calificaciones
- Groundwater Flow EquationDocumento21 páginasGroundwater Flow EquationArt RmbdAún no hay calificaciones
- Bending Solutions of Rectangular Thin PlatesDocumento10 páginasBending Solutions of Rectangular Thin PlatesRNAún no hay calificaciones
- A Good Lecture About PlasticityDocumento10 páginasA Good Lecture About PlasticityusamaumerAún no hay calificaciones
- Pages From Stress5 - ht08Documento3 páginasPages From Stress5 - ht08Anonymous ND7J0nIYAún no hay calificaciones
- Problem of An Elliptical Cutout in A Tensile Sheet (Inglis Solution)Documento4 páginasProblem of An Elliptical Cutout in A Tensile Sheet (Inglis Solution)Siddharth JainAún no hay calificaciones
- P P Solve For Abx and Aby, Or: X yDocumento1 páginaP P Solve For Abx and Aby, Or: X yMetin MehelAún no hay calificaciones
- Sol 8Documento5 páginasSol 8De VoAún no hay calificaciones
- In The Case of Multiply-Connected Body, Shown Below: V A Dxdy MDocumento8 páginasIn The Case of Multiply-Connected Body, Shown Below: V A Dxdy MBenny SnuggiesAún no hay calificaciones
- Metal Working DerivationsDocumento17 páginasMetal Working DerivationsShrutiAún no hay calificaciones
- Conservation of Momentum-8 Derivation: UdydzvDocumento15 páginasConservation of Momentum-8 Derivation: UdydzvDarvik YadavAún no hay calificaciones
- Relativistic Quantum Mechanics IntroDocumento33 páginasRelativistic Quantum Mechanics IntroATP_101Aún no hay calificaciones
- FailureNotes PDFDocumento8 páginasFailureNotes PDFsameshni pillayAún no hay calificaciones
- LN - 2 - Relationships Among Bending Moment (M), Shear Force (S) and Load Intensity (P) in A BeamDocumento2 páginasLN - 2 - Relationships Among Bending Moment (M), Shear Force (S) and Load Intensity (P) in A BeamKushani PiyumikaAún no hay calificaciones
- Concepts of Stress and Strain: P Stress at A PointDocumento21 páginasConcepts of Stress and Strain: P Stress at A PointNarendra ChavdaAún no hay calificaciones
- Final ProjectDocumento4 páginasFinal ProjectChacho BacoaAún no hay calificaciones
- ES220 09 HomeworkSetSolnsS FromStone08Documento88 páginasES220 09 HomeworkSetSolnsS FromStone08Jeongwon KimAún no hay calificaciones
- Plate TheoryDocumento2 páginasPlate TheoryPaúl ZambranoAún no hay calificaciones
- DM ms205Documento14 páginasDM ms205Doente PedroAún no hay calificaciones
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsDe EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsAún no hay calificaciones
- Adaptive Finite-Element Analysis of Plastic Deformation of Plates Under Projectile ImpactDocumento8 páginasAdaptive Finite-Element Analysis of Plastic Deformation of Plates Under Projectile Impactadhi.rohadhiAún no hay calificaciones
- BagusDocumento12 páginasBagusadhi.rohadhiAún no hay calificaciones
- Finite Element Shot Peening Simulation For Residual Stress. Analysis and Comparison With Experimental ResultsDocumento10 páginasFinite Element Shot Peening Simulation For Residual Stress. Analysis and Comparison With Experimental Resultsadhi.rohadhiAún no hay calificaciones
- Adaptive Finite-Element Analysis of Plastic Deformation of Plates Under Projectile ImpactDocumento8 páginasAdaptive Finite-Element Analysis of Plastic Deformation of Plates Under Projectile Impactadhi.rohadhiAún no hay calificaciones
- postedcontentadminuploadsFAQs20for20Organization PDFDocumento10 páginaspostedcontentadminuploadsFAQs20for20Organization PDFMohd Adil AliAún no hay calificaciones
- Heimbach - Keeping Formingfabrics CleanDocumento4 páginasHeimbach - Keeping Formingfabrics CleanTunç TürkAún no hay calificaciones
- QuexBook TutorialDocumento14 páginasQuexBook TutorialJeffrey FarillasAún no hay calificaciones
- Chapter 4 Achieving Clarity and Limiting Paragraph LengthDocumento1 páginaChapter 4 Achieving Clarity and Limiting Paragraph Lengthapi-550339812Aún no hay calificaciones
- 2011-2012 - Medical - DirectoryDocumento112 páginas2011-2012 - Medical - DirectoryЈелена КошевићAún no hay calificaciones
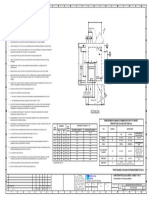
- Notes:: Reinforcement in Manhole Chamber With Depth To Obvert Greater Than 3.5M and Less Than 6.0MDocumento1 páginaNotes:: Reinforcement in Manhole Chamber With Depth To Obvert Greater Than 3.5M and Less Than 6.0Mسجى وليدAún no hay calificaciones
- Caspar Hirschi - The Origins of Nationalism - An Alternative History From Ancient Rome To Early Modern Germany-Cambridge University Press (2012)Documento255 páginasCaspar Hirschi - The Origins of Nationalism - An Alternative History From Ancient Rome To Early Modern Germany-Cambridge University Press (2012)Roc SolàAún no hay calificaciones
- Genetics Icar1Documento18 páginasGenetics Icar1elanthamizhmaranAún no hay calificaciones
- LP For EarthquakeDocumento6 páginasLP For Earthquakejelena jorgeoAún no hay calificaciones
- What's New in CAESAR II: Piping and Equipment CodesDocumento1 páginaWhat's New in CAESAR II: Piping and Equipment CodeslnacerAún no hay calificaciones
- PSA Poster Project WorkbookDocumento38 páginasPSA Poster Project WorkbookwalliamaAún no hay calificaciones
- World Insurance Report 2017Documento36 páginasWorld Insurance Report 2017deolah06Aún no hay calificaciones
- Health Post - Exploring The Intersection of Work and Well-Being - A Guide To Occupational Health PsychologyDocumento3 páginasHealth Post - Exploring The Intersection of Work and Well-Being - A Guide To Occupational Health PsychologyihealthmailboxAún no hay calificaciones
- PDF Chapter 5 The Expenditure Cycle Part I Summary - CompressDocumento5 páginasPDF Chapter 5 The Expenditure Cycle Part I Summary - CompressCassiopeia Cashmere GodheidAún no hay calificaciones
- Sociology As A Form of Consciousness - 20231206 - 013840 - 0000Documento4 páginasSociology As A Form of Consciousness - 20231206 - 013840 - 0000Gargi sharmaAún no hay calificaciones
- ASHRAE Journal - Absorption RefrigerationDocumento11 páginasASHRAE Journal - Absorption Refrigerationhonisme0% (1)
- Kiritsis SolutionsDocumento200 páginasKiritsis SolutionsSagnik MisraAún no hay calificaciones
- Music 10 (2nd Quarter)Documento8 páginasMusic 10 (2nd Quarter)Dafchen Villarin MahasolAún no hay calificaciones
- Application Form InnofundDocumento13 páginasApplication Form InnofundharavinthanAún no hay calificaciones
- Subject Manual Tle 7-8Documento11 páginasSubject Manual Tle 7-8Rhayan Dela Cruz DaquizAún no hay calificaciones
- 20-Admission of PatientDocumento3 páginas20-Admission of Patientakositabon100% (1)
- Z-Purlins: Technical DocumentationDocumento11 páginasZ-Purlins: Technical Documentationardit bedhiaAún no hay calificaciones
- Pidsdps 2106Documento174 páginasPidsdps 2106Steven Claude TanangunanAún no hay calificaciones
- Injections Quiz 2Documento6 páginasInjections Quiz 2Allysa MacalinoAún no hay calificaciones
- Reported SpeechDocumento6 páginasReported SpeechRizal rindawunaAún no hay calificaciones
- AMULDocumento11 páginasAMULkeshav956Aún no hay calificaciones
- English Homework 10 Grammar Focus 2: Lecturer: Mr. Dr. H. Abdul Hamid, M.SiDocumento4 páginasEnglish Homework 10 Grammar Focus 2: Lecturer: Mr. Dr. H. Abdul Hamid, M.SiMutiara siwa UtamiAún no hay calificaciones
- Fast Track Design and Construction of Bridges in IndiaDocumento10 páginasFast Track Design and Construction of Bridges in IndiaSa ReddiAún no hay calificaciones
- Journal of Biology EducationDocumento13 páginasJournal of Biology EducationFarah ArrumyAún no hay calificaciones
- Baseline Scheduling Basics - Part-1Documento48 páginasBaseline Scheduling Basics - Part-1Perwaiz100% (1)